1 镜像原理
1.1 思考
- Docker镜像的本质是什么?
- Docker中一个CentOS镜像为什么只有200MB,而一个CentOS操作系统的iso文件要几个G?
- Docker中的一个Tomcat镜像为什么有500MB,而一个Tomcat安装包只有70多MB。
1.2 Linux文件系统
- 操作系统组成部分:
- 进程调度子系统。
- 进程通信子系统。
- 内存管理子系统。
- 设备管理子系统。
- 文件管理子系统。
- 网络通信子系统。
- 作业控制子系统。
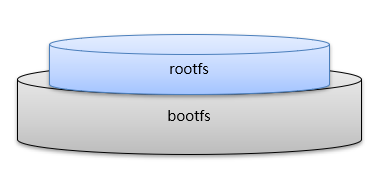
- Linux文件系统由bootfs和rootfs两部分组成。
- bootfs:包含bootloader(引导加载程序)和kernel(内核)。
- rootfs:root文件系统,包含的就是典型的Linux系统中的/dev,/proc,/etc等标准目录和文件。
- 不同的Linux发行版,bootfs基本一样,而rootfs不同,如Ubuntu和CentOS等。
1.3 Docker镜像原理
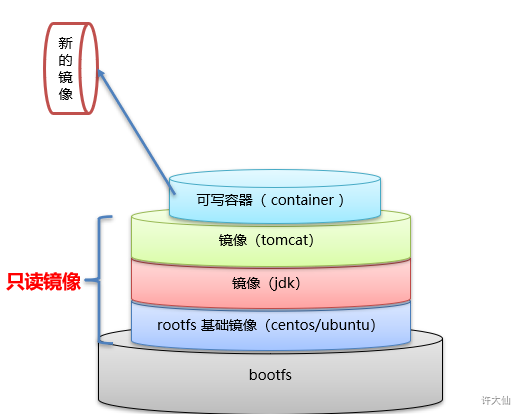
- Docker镜像是由特殊的文件系统叠加而成。
- 最低端是bootfs,并使用宿主机的bootfs。
- 第二层是root文件系统的rootfs,称为base image。
- 然后再往上可以叠加其他的镜像文件。
- 统一文件系统(Union File System)技术能够将不同的层整合成一个文件系统,为这些层提供一个统一的视角,这样就隐藏了多层的存在,在用户的角度看来,只存在一个文件系统。
- 一个镜像可以放在另一个镜像的上面。位于下面的镜像称为父镜像,最底部的镜像称为基础镜像。
- 当从一个镜像启动容器时,Docker会在最顶层加载一个读写文件系统作为容器。
1.4 总结
- 问:Docker镜像的本质是什么?
- 答:是一个分层文件系统。
- 问:Docker中一个CentOS镜像为什么只有200MB,而一个CentOS操作系统的iso文件要几个G?
- 答:CentOS的iso镜像包含bootfs和rootfs,而Docker的centos镜像复用操作系统的bootfs,只有rootfs和其它镜像层。
- 问:Docker中的一个Tomcat镜像为什么有500MB,而一个Tomcat安装包只有70多MB?
- 答:Docker中镜像是分层的,Tomcat虽然只有70多MB,但他需要依赖于父镜像和基础镜像,所以整个队外暴露的Tomcat镜像大小约500多MB。
2 镜像制作
2.1 容器转为镜像
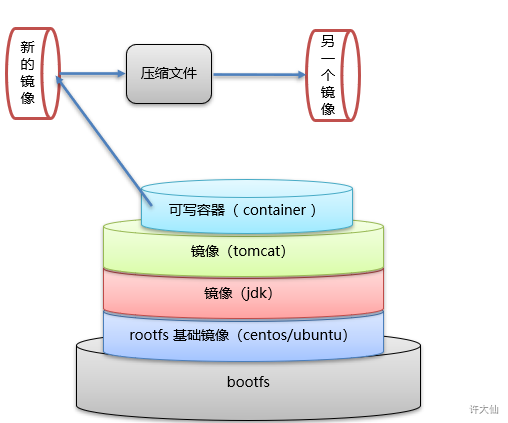
- 容器转为镜像
docker commit 容器id 镜像名称:版本号
- 将镜像压缩
docker save -o 压缩文件名称 镜像名称:版本号
- 将压缩文件还原为镜像
docker save -i 压缩文件名称
2.2 Dockerfile
2.2.1 概念
- Dockerfile是一个文本文件。
- 包含了一条条的指令。
- 每一条指令构建一层,基于基础镜像,最终构建一个新的镜像。
- 对于开发人员,可以为开发团队提供一个完全一致的开发环境。
- 对于测试人员,可以直接拿开发时所构建的镜像或者通过Dockerfile文件构建一个新的镜像。
- 对于运维人员,在部署的时候,可以实现应用的无缝移植。
2.2.2 Dockerfile指令
| 关键字 | 作用 | 备注 |
|---|---|---|
| FROM | 指定父镜像 | 指定Dockerfile基于那个image构建 |
| MAINTAINER | 作者信息 | 用来标明这个Dockerfile谁写的 |
| LABEL | 标签 | 用来标明Dockerfile的标签,可以使用Label代替Maintainer,最终都是在docker image基本信息中可以查看 |
| RUN | 执行命令 | 执行一段命令,默认是/bin/sh 格式: RUN command 或者 RUN [“command” , “param1”,”param2”] |
| CMD | 容器启动命令 | 提供启动容器时候的默认命令 和ENTRYPOINT配合使用.格式 CMD command param1 param2 或者 CMD [“command” , “param1”,”param2”] |
| ENTRYPOINT | 入口 | 一般在制作一些执行就关闭的容器中会使用 |
| COPY | 复制文件 | build的时候复制文件到image中 |
| ADD | 添加文件 | build的时候添加文件到image中 不仅仅局限于当前build上下文 可以来源于远程服务 |
| ENV | 环境变量 | 指定build时候的环境变量 可以在启动的容器的时候 通过-e覆盖 格式ENV name=value |
| ARG | 构建参数 | 构建参数 只在构建的时候使用的参数 如果有ENV 那么ENV的相同名字的值始终覆盖arg的参数 |
| VOLUME | 定义外部可以挂载的数据卷 | 指定build的image那些目录可以启动的时候挂载到文件系统中 启动容器的时候使用 -v 绑定 格式 VOLUME [“目录”] |
| EXPOSE | 暴露端口 | 定义容器运行的时候监听的端口 启动容器的使用-p来绑定暴露端口 格式: EXPOSE 8080 或者 EXPOSE 8080/udp |
| WORKDIR | 工作目录 | 指定容器内部的工作目录 如果没有创建则自动创建 如果指定/ 使用的是绝对地址 如果不是/开头那么是在上一条workdir的路径的相对路径 |
| USER | 指定执行用户 | 指定build或者启动的时候 用户 在RUN CMD ENTRYPONT执行的时候的用户 |
| HEALTHCHECK | 健康检查 | 指定监测当前容器的健康监测的命令 基本上没用 因为很多时候 应用本身有健康监测机制 |
| ONBUILD | 触发器 | 当存在ONBUILD关键字的镜像作为基础镜像的时候 当执行FROM完成之后 会执行 ONBUILD的命令 但是不影响当前镜像 用处也不怎么大 |
| STOPSIGNAL | 发送信号量到宿主机 | 该STOPSIGNAL指令设置将发送到容器的系统调用信号以退出。 |
| SHELL | 指定执行脚本的shell | 指定RUN CMD ENTRYPOINT 执行命令的时候 使用的shell |
2.2.3 自定义CentOS镜像
- Dockerfile
# 定义父镜像FROM centos:7# 定义作者信息MAINTAINER weiwei.xu <1900919313@qq.com># 执行安装vim命令RUN yum -y install vim# 定义默认的工作目录WORKDIR /usr# 定义容器启动执行的命令CMD /bin/bash
- 通过Dockfile构建镜像
docker build -f Dockerfile文件路径 -t 镜像名称:版本号 镜像存放的绝对路径
- 示例:

若有收获,就点个赞吧
0 人点赞
