- Title
- Summary
- Research Objective
- Problem Statement
- Methods
- Training
- Post processing
- Evaluation
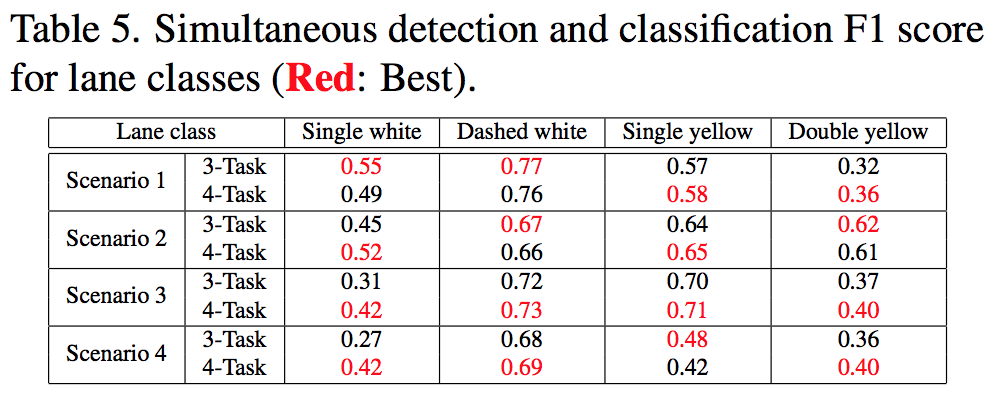
- grid-level annotation is more suitable for lane detection and recognition
- Except for “no rain, daytime condition”, recognition of the single white line is highly improved. This shows that using the VPP task on rainy and night conditions improves the activation of roadway boundaries which are usually marked with single white lines.
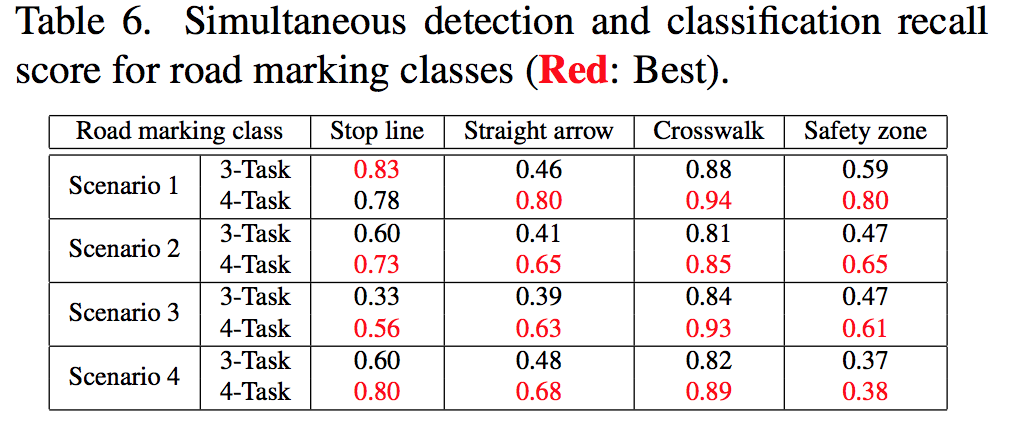
- 对路标的识别除了停止线这种水平边缘的标志外,都在一定程度上受到了VPP的提升
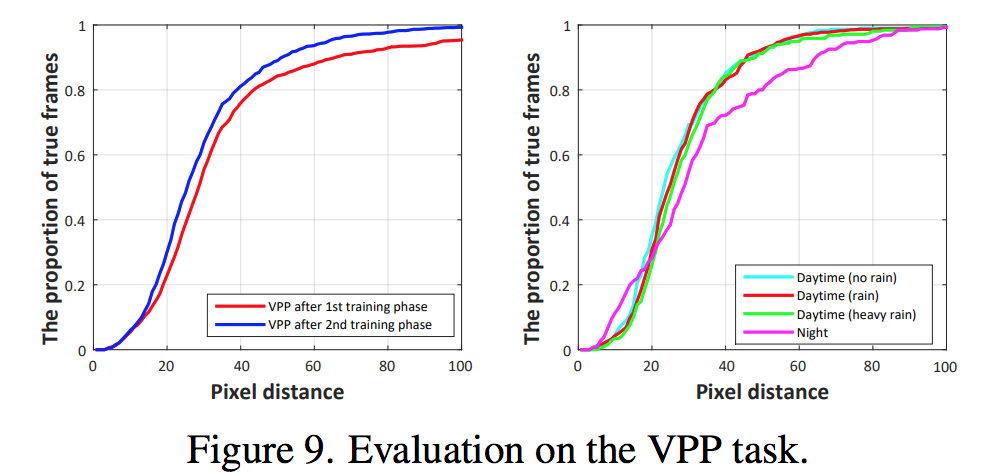
- VPP task gets help from lane and road marking detection tasks
- Conclusion
Title
VPGNet: Vanishing Point Guided Network for Lane and Road Marking
Detection and Recognition
Lee_VPGNet_Vanishing_Point_ICCV_2017_paper.pdf
Summary
Research Objective
- 解决复杂光照以及恶劣天气条件下的车道线以及路标检测(robust under diverse environments);
- Perform in realtime;
Problem Statement
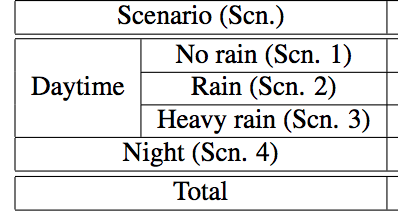
- 目前的车道线以及路标检测限于良好天气下的情况,在复杂光照以及恶劣天气条件下识别结果会变差;
- 公开的车道线以及路标检测数据不足以支撑深度学习的使用,同时它们都是在晴朗天气下拍摄的,没有考虑现场和恶劣天气情况;
Methods
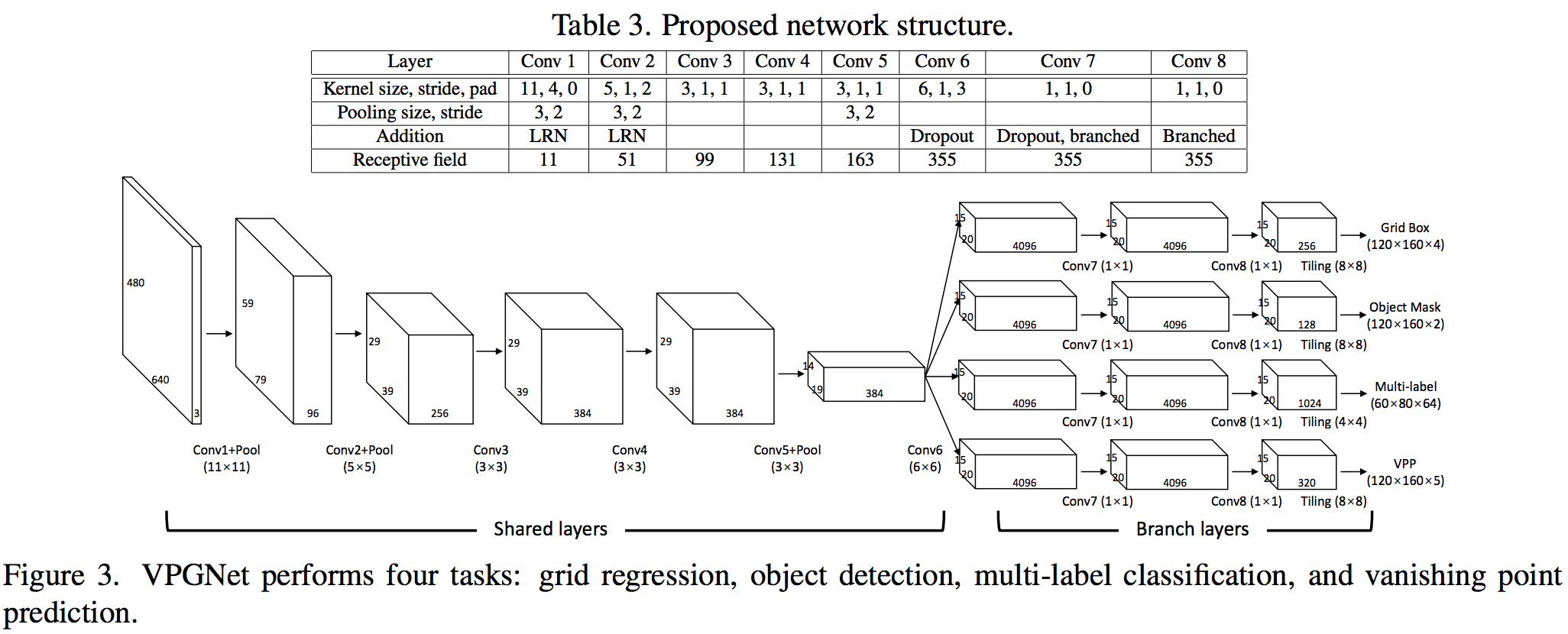
Vanishing Point Prediction Task(VPP)
Vanishing Point是空间中的平行线通过图形透视收敛到二维平面的点,VP可用于提供场景的全局几何上下文,这对于推断车道和道路标记的位置非常重要。
We define five channels for the output of the VPP task: one absence channel and four quadrant channels. 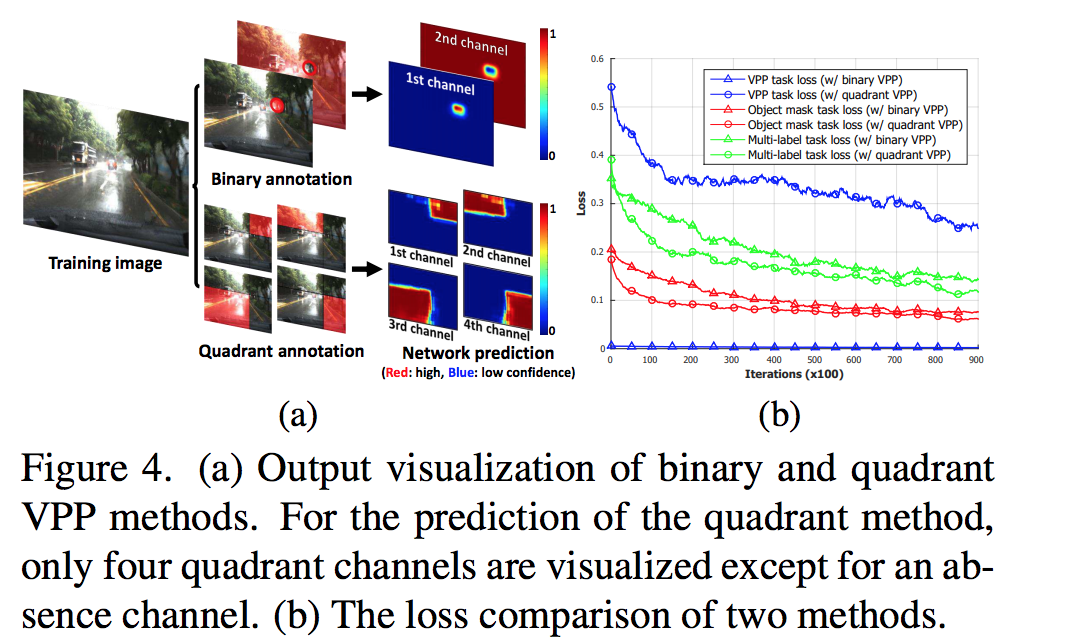
Training
- VP分支对Lane Detection有较大的提升,为了消除影像,先训练VP分支,训练到收敛
- If a certain task loss weight is small, it becomes dependent on other tasks and vice versa. Loss权重全部置为1,然后按照初始的Loss作为权重参考。如果训练中Loss差异变大,重新执行上述步骤平衡loss。
Post processing
todo
Evaluation
2-Task network includes regression and binary classification tasks.
3-Task network includes 2-Task and a multi-label classification task.
4-Task network includes 3- Task and a VPP task, which is the VPGNet.
grid-level annotation is more suitable for lane detection and recognition
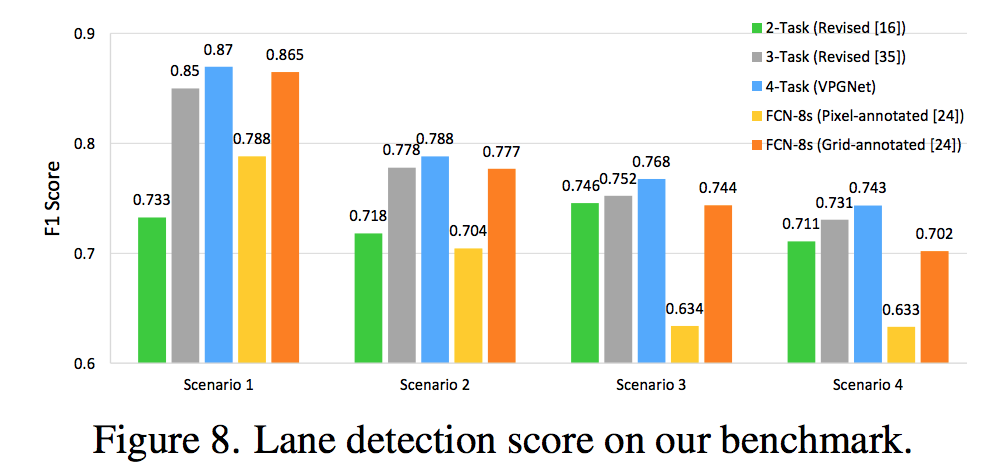
Except for “no rain, daytime condition”, recognition of the single white line is highly improved. This shows that using the VPP task on rainy and night conditions improves the activation of roadway boundaries which are usually marked with single white lines.
对路标的识别除了停止线这种水平边缘的标志外,都在一定程度上受到了VPP的提升
VPP task gets help from lane and road marking detection tasks
Conclusion

若有收获,就点个赞吧
0 人点赞
