| Author: | Laurène Claussmann , Marc Revilloud, Dominique Gruyer, and Sébastien Glaser |
|---|---|
| Publisher: | IEEE |
| Publish year: | 2019 |
| Editor: | 柯西 |
Abstract/摘要
本文展示了近十年来高速场景下的运动规划技术,在本文的上下文中,运动规划表示路径生成和决策。在受约束的环境框架下,高速场景将问题限制在具有特定驾驶员规则的高速和小曲率道路上,车道变换、避障、汽车跟随和合并是本文中讨论的情况。在做过车辆自动驾驶的简单介绍之后,详述运功规划条件。然后评估主流算法,及其特点,以及在高速自动驾驶的应用,最后是当前和未来的挑战。
Instruction/介绍
前情提要略。
关于高速规划,主要辅助技术涉及巡航控制系统(CC)、智能速度自适应(ISA)、车道保持辅助(LKA)或车道偏离警告(LDW)的纵向和横向舒适性和安全性。在与障碍物交互时,防撞系统要么警告驾驶员即将发生碰撞,例如车道变换辅助系统(LCA),要么自动采取行动,帮助驾驶员保持安全,例如自适应巡航控制(ACC)或自动紧急制动(AEB)。
继2011年6月美国内华达州授权在公共道路上行驶的无人驾驶汽车之后,美国其他州尝试通过法律在交通中测试自动驾驶汽车,联合国欧洲经济委员会(欧洲经委会)修改《维也纳道路交通公约》[8],允许自动驾驶系统,”前提是这些技术符合联合国车辆法规,或者可以被驾驶员接管或关闭”。随着汽车领域的这种演变,汽车工程师协会(SAE)发布了具有6级系统的自动驾驶汽车的标准分类,从0(无控制但主动安全系统)到5(驾驶无人干预)[10],汽车制造商在技术上尚未达到4级和5级;2016年,国际大合作驾驶挑战赛(GCDC)[19]提出了并道,交叉和紧急交通场景。除了研究项目外,2016年,许多汽车公司还推出了与SAE分类2级相对应的半自动驾驶汽车。在谷歌汽车的演示之后,苹果宣布了Titan项目,百度开始使用Cloud ride进行公开道路测试。与此同时Uber和Lyft联合测试自动驾驶算法。
然而,以模仿逼真的现实车辆驾驶为原型的研究标准化引入了问题,例如功能安全,实时计算,系统方法或低成本开发,以及停车,交叉路口管理或高速公路驾驶的特定应用。高速驾驶由于简单的结构场景和驾驶行为限制,使其成为交通系统中最容易实现完全自主的模块。
本综述的目的是为高速公路驾驶建立运动规划算法的分类。文章结构如下:第二章阐述应用场景,涉及感知和控制约束,以及高速驾驶交通规则;第三章描述技术现状;第四章展示高速场景应用的对比列表;最后,第五部分讨论了下一代自动驾驶汽车在运动规划中需要填补的空白;第六章对本文工作做总结。
II高速场景运动规划
术语
几何状态空间被称为the configuration space.The configuration space-time被成为The evolution space。这两个空间有三个子空间:the collision space(有障碍),the uncertain space(不确定是否有障碍),the free space(无障碍)。通用术语表征了状态随时间演变的运动特征。
III.技术现状
运动规划方法选择取决于运动规划问题建模。
1.问题建模根据输入数据(连续/离散,代数/解析,静态/动态)不同而不同,因此感知技术对运动规划算法影响很大。即使在运动规划领域不确定性考虑的越来越多,涉及传感器的架构和技术问题的运动规划的论文很少。文献[38]作为推荐阅读。
2.运动规划结合了五个不可避免的方面:1.状态估计,2.时间演变,3.行动规划,4.标准优化,5.遵守约束。如何处理这些问题会改变问题的前景。
3.现存运动规划方法分为两种:区分驾驶模式和不区分驾驶模式。第一种,驾驶模式和常规情况是分离的。例如[39],作者只关注高速公路的车道变换和并道的具体操作。在本文中,我们只将该情况作为一套特殊的标准和约束,而非不同的算法类型。所以所有的算法可以被应用于不同的场景。
在本章,首先介绍算法分类,然后回顾了从2007年至今的流行算法在高速场景规划中算法的产生原理和发展现状。
A. Taxonomy Description 分类描述
我们按照图3对算法进行分类。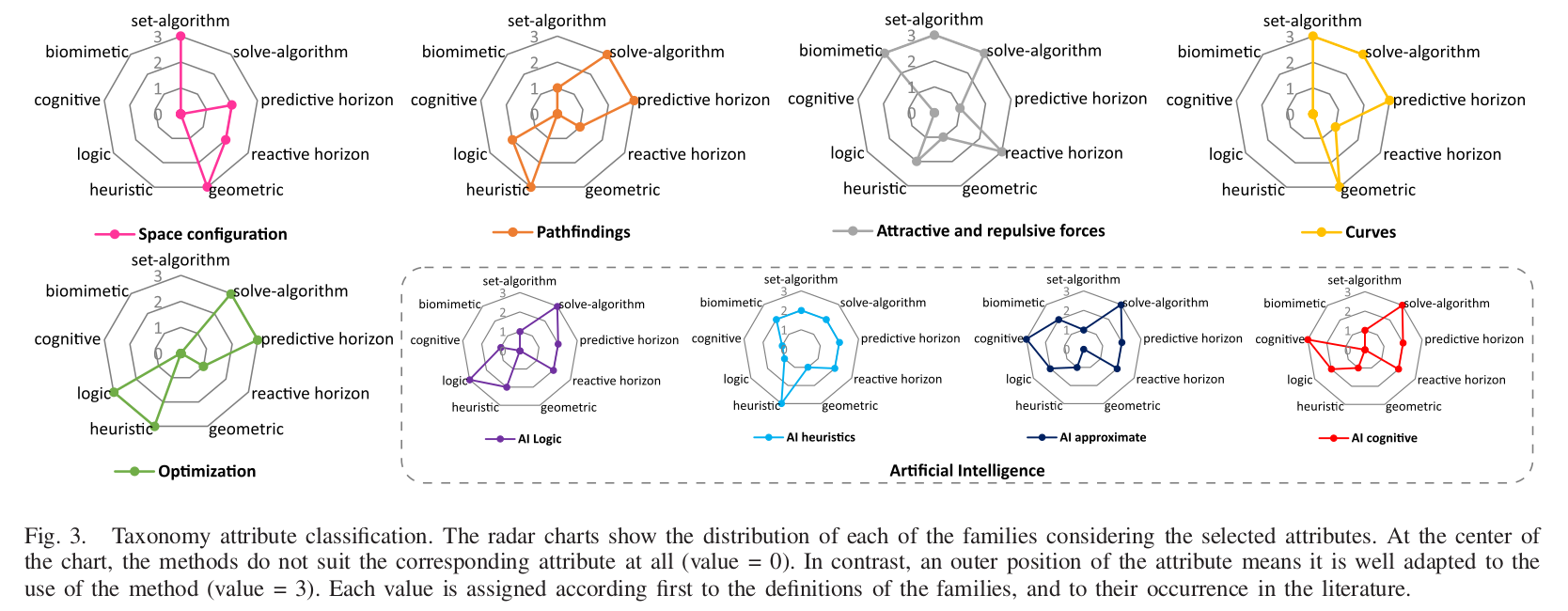 遵循相同原则的算法被分为一类,他们通常有相同的输出,相同的属性和相同的数学领域。我们根据以下特征进行分类:
遵循相同原则的算法被分为一类,他们通常有相同的输出,相同的属性和相同的数学领域。我们根据以下特征进行分类:
1.输出类型:空间,路径,轨迹,操作或符号表示。这些输出能够被用于图一中的Control和Driver模块。此外还要考虑规划算法仅返回分解的解还是参考运动,第一种情况称为集合算法(set-algorithm),需要添加互补算法以找到可行运动,第二种情况称为求解算法(solve-algorithm)。这些属性由[40]拓展而来,该作者定义了FindSpace和Findpath算法,来区分在进化空间中寻找安全位置,和在起点到终点找到一系列安全位置的算法。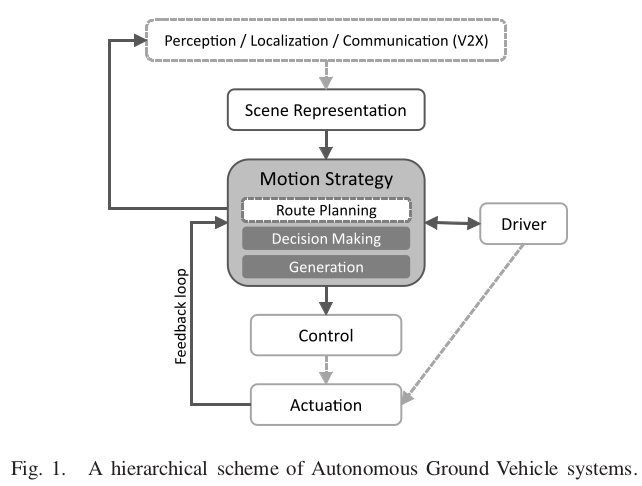
2.算法的时空属性:预测或反应范围,在II-B中详述
3.所属数学范畴:几何,启发式,逻辑,认知,仿生学。这定义了方法的理念和求解器的理论框架。
- 几何领域基于空间属性,同时考虑环境和自车(动力学约束)的空间约束,需要处理大量的空间探索和优化问题。
- 启发式领域通常根据约束或数据正确性等相关知识,能高效地找到近似解,避免算法复杂性和延迟问题,但是不能处理复杂问题,不能保证找到最优解。
- 逻辑领域是指基于断言的演绎方法。这种断言通常是在环境演变的基本规则上做出的,主要优点是,很容易将影响与原因联系起来,但会受到组合爆炸的影响。
- 认知方法依赖于基于对既定情况的先验知识以及常识,接近于逻辑思维方式,例如遵守驾驶规则。优点是能用先验知识获取新的信息。在自动驾驶应用中,一个热点是使决策近似于人类行为。但是这些理论未被充分验证,因此我们不考虑依赖认知的算法。
- 许多基于驾驶员的理论都认为,驾驶员行为太复杂,太难,甚至不可能建模,因为它不合理。最后我们探索仿生学领域,描述了生理学上的方法。它们遵循物理定律,这些物理定律易于实现,但可能会陷入无限循环运动行为中,该系统的收敛性必须通过可行的解决方案来实现。
B. Algorithm Classification 算法分类:
1.Space Configuration: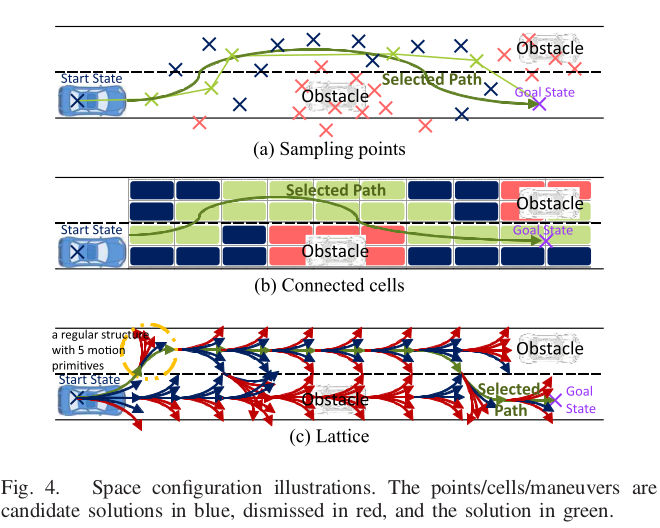
该类算法难点是找到正确的空间配置参数,以获得运动和环境的良好表现。如果离散化太粗糙,将会有较大的碰撞风险,并且控制量不连续;但是,如果离散化太精细,算法的实时性能将较差。我们将该算法分为三个小类:采样点,连接格,lattic。

若有收获,就点个赞吧
0 人点赞
