文档: https://www.elastic.co/guide/index.html
数据类型
面试
1、elasticsearch 了解多少,说说你们公司 es 的集群架构,索引数据大小,分片有多少,以及一些。
2、elasticsearch 的倒排索引是什么
3、elasticsearch 索引数据多了怎么办,如何调优,部署
5、详细描述一下 Elasticsearch 索引文档的过程
6、详细描述一下 Elasticsearch 搜索的过程?
7、Elasticsearch 在部署时,对 Linux 的设置有哪些优化方法
8、lucence 内部结构是什么?
9、Elasticsearch 是如何实现 Master 选举的?
10、Elasticsearch 中的节点(比如共 20 个),其中的 10 个选了一个master,另外 10 个选了另一个 master,怎么办?
11、客户端在和集群连接时,如何选择特定的节点执行请求的?
12、详细描述一下 Elasticsearch 索引文档的过程。
安装
基本概念及原理
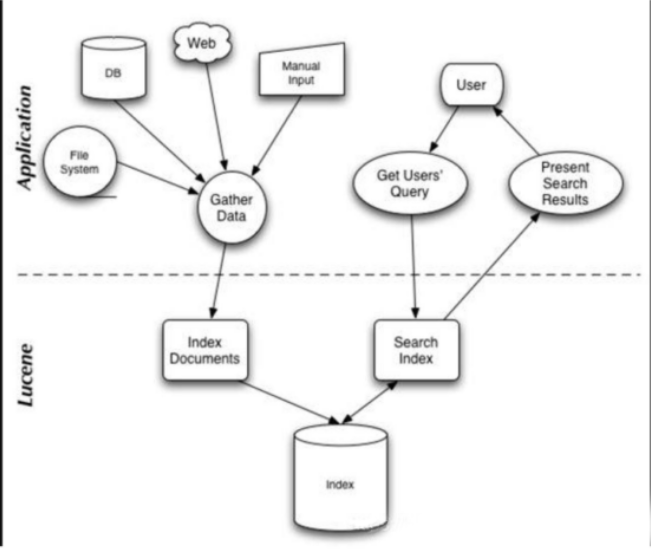
Elasticsearch是基于Lucene的分布式的全文搜索引擎,基于RESTful接口,其次是Apache Solr,也是基于Lucene。
Es能够支持大规模横向扩展,以支撑PB级的结构化和非结构化海量数据的处理
索引(index)是用于组织数据的逻辑命名空间(如数据库)
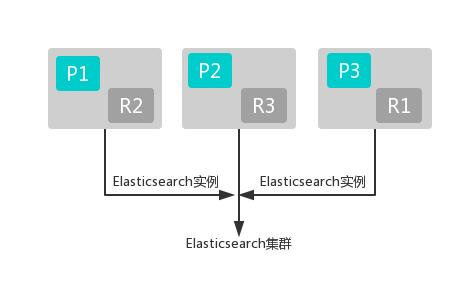
Elasticsearch的索引有一个或多个分片(shard)(默认为5
分片是实际存储数据的Lucene索引,它本身就是一个搜索引擎。
每个分片可以有零个或多个副本(replicas)(默认为1)Elasticsearch索引还具有“类型(type)”(如数据库中的表),允许在索引中对数据进行逻辑分区
lucence
kibana和Elasticsearch和logstash和ik版本一致
Elasticsearch是用Java语言开发的,并作为Apache许可条款下的开放源码发布,是一种流行的企业级搜索引擎。
bitMap
https://juejin.im/post/5c4fd2af51882525da267385
倒排索引 Inverted Index
传统的检索方式是通过文章,逐个遍历找到对应关键词的位置。
倒排索引,是通过分词策略,形成了词和文章的映射关系表,这种词典+映射表即为倒排索引。有了倒排索引,就能高效的检索文章了,极大的提高了检索效率。
倒排索引的底层实现是基于:FST(Finite State Transducer)数据结构。
Lucene 从 4+ 版本后开始大量使用的数据结构是 FST。FST 有两个优点:
1)空间占用小。通过对词典中单词前缀和后缀的重复利用,压缩了存储空间;
2)查询速度快。O(len(str)) 的查询时间复杂度。
如何实现 master 选举的
master节点
职责主要包括 集群、节点和索引的管理,不负责文档级别的管理;
只有候选主节点(master:true)的节点才能成为主节点。
data节点
可以关闭http功能。
核对了一下代码,核心入口为 findMaster,选择主节点成功返回对应 Master,否则返回 null。选举流程大致描述如下:
第一步:确认候选主节点数达标,elasticsearch.yml 设置的值discovery.zen.minimum_master_nodes;
第二步:比较:先判定是否具备 master 资格,具备候选主节点资格的优先返回;
若两节点都为候选主节点,则 id 小的值会主节点。注意这里的 id 为 string 类型。
——
(1)Elasticsearch 的选主是 ZenDiscovery 模块负责的,主要包含 Ping(节点之间通过这个 RPC 来发现彼此)和 Unicast(单播模块包含一个主机列表以控制哪些节点需要 ping 通)这两部分;
(2)对所有可以成为 master 的节点根据 nodeId 字典排序,每次选举每个节点都把自己所知道节点排一次序,然后选出第一个(第 0 位)节点,暂且认为它是 master 节点。
(3)如果对某个节点的投票数达到一定的值(可以成为 master 节点数 n/2+1)并且该节点自己也选举自己,那这个节点就是 master。否则重新选举一直到满足上述条件。
集群脑裂
指 Elasticsearch 集群中的节点(比如共 20 个),其中的 10 个选了一个 master,另外 10 个选了另一个 master 的情况。
当集群 master 候选数量不小于 3 个时,可以通过设置最少投票通过数量(最小主节点数discovery.zen.minimum_master_nodes)超过所有候选节点一半以上来解决脑裂问题;
当候选数量为两个时,只能修改为唯一的一个 master 候选,其他作为 data 节点,避免脑裂问题。
索引文档原理
https://blog.csdn.net/abcd1101/article/details/89010070
https://www.toutiao.com/i6740898116410540556/
索引文档应该理解为文档写入 ES,创建索引的过程。
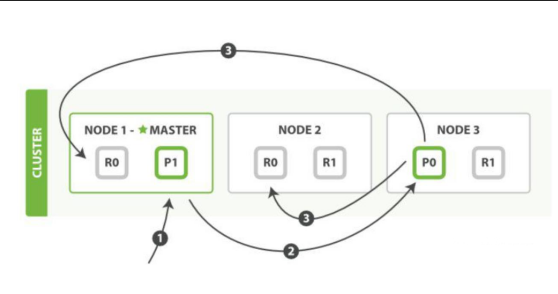
第一步:客户写集群某节点写入数据,发送请求。(如果没有指定路由/协调节点,请求的节点扮演路由节点的角色。)
第二步:节点 1 接受到请求后,使用文档_id 来确定文档属于分片 0。请求会被转到另外的节点,假定节点 3。因此分片 0 的主分片分配到节点 3 上。
第三步:节点 3 在主分片上执行写操作,如果成功,则将请求并行转发到节点 1和节点 2 的副本分片上,等待结果返回。所有的副本分片都报告成功,节点 3 将向协调节点(节点 1)报告成功,节点 1 向请求客户端报告写入成功。
如果面试官再问:第二步中的文档获取分片的过程?
回答:借助路由算法获取,路由算法就是根据路由和文档 id 计算目标的分片 id 的过程。
1shard = hash(_routing) % (num_of_primary_shards)
搜索的原理
搜索拆解为“query then fetch” 两个阶段。
query 阶段的目的:定位到位置,但不取。
步骤拆解如下:
(1)假设一个索引数据有 5 主+1 副本 共 10 分片,一次请求会命中(主或者副本分片中)的一个。
(2)每个分片在本地进行查询,结果返回到本地有序的优先队列中。
(3)第 2)步骤的结果发送到协调节点,协调节点产生一个全局的排序列表。
fetch 阶段的目的:取数据。
路由节点获取所有文档,返回给客户端。
脑裂
Elasticsearch 中的节点(比如共 20 个),其中的 10 个选了一个 master,另外 10 个选了另一个 master,怎么办?
(1)当集群 master 候选数量不小于 3 个时,可以通过设置最少投票通过数量(discovery.zen.minimum_master_nodes)超过所有候选节点一半以上来解决脑裂问题;
(3)当候选数量为两个时,只能修改为唯一的一个 master 候选,其他作为 data节点,避免脑裂问题。
常用API
分词器
standard(默认) 将词汇转成小写形式,并且去除停用词和标点符号,支持中文,单字切分
simple 将词汇转成小写形式,去除数字
whitespace 去除空格,不支持中文
分词器测试
POST _analyze
{
"analyzer":"standard",
"text":"hello everyone"
}
ik分词器
github-release处下载,解压后放入plugins … more
ik_smart和ik_max_word
通过增加config中dic字典来优化分词效果
ES版本控制
普通关系型数据库使用的是(悲观并发控制(PCC))
当我们在读取一个数据前先锁定这一行,然后确保只有读取到数据的这个线程可以修改这一行数据
ES使用的是(乐观并发控制(OCC))
ES不会阻止某一数据的访问,然而,如果基础数据在我们读取和写入的间隔中发生了变化,更新就会失败,这时候就由程序来决定如何处理这个冲突。它可以重新读取新数据来进行更新,又或者将这一情况直接反馈给用户。
ES如何实现版本控制(使用es内部版本号)
1:首先得到需要修改的文档,获取版本(_version)号
curl -XGET http://localhost:9200/bigdata/product/1
2:再执行更新操作的时候把版本号传过去
curl -XPUT http://localhost:9200/bigdata/product/1?version=1 -d ‘{“name”:”hadoop”,”version”:3}’(覆盖)
curl -XPOST http://localhost:9200/bigdata/product/1/_update?version=3 -d ‘{“doc”:{“name”:”apache hadoop”,”latest_version”: 2.6}}’(部分更新)
3:如果传递的版本号和待更新的文档的版本号不一致,则会更新失败
ES如何实现版本控制(使用外部版本号)
如果你的数据库已经存在了版本号,或者是可以代表版本的时间戳。这时就可以在es的查询url后面添加version_type=external来使用这些号码。
面试
Elasticsearch对于大数据量(上亿量级)的聚合如何实现?
Elasticsearch 提供的首个近似聚合是cardinality 度量。它提供一个字段的基数,即该字段的distinct或者unique值的数目。它是基于HLL算法的。HLL 会先对我们的输入作哈希运算,然后根据哈希运算的结果中的 bits 做概率估算从而得到基数。其特点是:可配置的精度,用来控制内存的使用(更精确 = 更多内存);小的数据集精度是非常高的;我们可以通过配置参数,来设置去重需要的固定内存使用量。无论数千还是数十亿的唯一值,内存使用量只与你配置的精确度相关。
在并发情况下,Elasticsearch如果保证读写一致?
可以通过版本号使用乐观并发控制,以确保新版本不会被旧版本覆盖,由应用层来处理具体的冲突;
- 另外对于写操作,一致性级别支持quorum/one/all,默认为quorum,即只有当大多数分片可用时才允许写操作。但即使大多数可用,也可能存在因为网络等原因导致写入副本失败,这样该副本被认为故障,分片将会在一个不同的节点上重建。
对于读操作,可以设置replication为sync(默认),这使得操作在主分片和副本分片都完成后才会返回;如果设置replication为async时,也可以通过设置搜索请求参数_preference为primary来查询主分片,确保文档是最新版本。
Elasticsearch在部署时,对Linux的设置有哪些优化方法?
64 GB 内存的机器是非常理想的, 但是32 GB 和16 GB 机器也是很常见的。少于8 GB 会适得其反。
- 如果你要在更快的 CPUs 和更多的核心之间选择,选择更多的核心更好。多个内核提供的额外并发远胜过稍微快一点点的时钟频率。
- 如果你负担得起 SSD,它将远远超出任何旋转介质。 基于 SSD 的节点,查询和索引性能都有提升。如果你负担得起,SSD 是一个好的选择。
- 即使数据中心们近在咫尺,也要避免集群跨越多个数据中心。绝对要避免集群跨越大的地理距离。
- 请确保运行你应用程序的 JVM 和服务器的 JVM 是完全一样的。 在 Elasticsearch 的几个地方,使用 Java 的本地序列化。
- 通过设置gateway.recover_after_nodes、gateway.expected_nodes、gateway.recover_after_time可以在集群重启的时候避免过多的分片交换,这可能会让数据恢复从数个小时缩短为几秒钟。
- Elasticsearch 默认被配置为使用单播发现,以防止节点无意中加入集群。只有在同一台机器上运行的节点才会自动组成集群。最好使用单播代替组播。
- 不要随意修改垃圾回收器(CMS)和各个线程池的大小。
- 把你的内存的(少于)一半给 Lucene(但不要超过 32 GB!),通过ES_HEAP_SIZE 环境变量设置。
- 内存交换到磁盘对服务器性能来说是致命的。如果内存交换到磁盘上,一个 100 微秒的操作可能变成 10 毫秒。 再想想那么多 10 微秒的操作时延累加起来。 不难看出 swapping 对于性能是多么可怕。
- Lucene 使用了大量的文件。同时,Elasticsearch 在节点和 HTTP 客户端之间进行通信也使用了大量的套接字。 所有这一切都需要足够的文件描述符。你应该增加你的文件描述符,设置一个很大的值,如 64,000。
补充:索引阶段性能提升方法
- 使用批量请求并调整其大小:每次批量数据 5–15 MB 大是个不错的起始点。
- 存储:使用 SSD
- 段和合并:Elasticsearch 默认值是 20 MB/s,对机械磁盘应该是个不错的设置。如果你用的是 SSD,可以考虑提高到 100–200 MB/s。如果你在做批量导入,完全不在意搜索,你可以彻底关掉合并限流。另外还可以增加 index.translog.flush_threshold_size 设置,从默认的 512 MB 到更大一些的值,比如 1 GB,这可以在一次清空触发的时候在事务日志里积累出更大的段。
- 如果你的搜索结果不需要近实时的准确度,考虑把每个索引的index.refresh_interval 改到30s。
如果你在做大批量导入,考虑通过设置index.number_of_replicas: 0 关闭副本。
详细描述一下Elasticsearch索引文档的过程。
协调节点默认使用文档ID参与计算(也支持通过routing),以便为路由提供合适的分片。
shard = hash(document_id) % (num_of_primary_shards)当分片所在的节点接收到来自协调节点的请求后,会将请求写入到Memory Buffer,然后定时(默认是每隔1秒)写入到Filesystem Cache,这个从Momery Buffer到Filesystem Cache的过程就叫做refresh;
- 当然在某些情况下,存在Momery Buffer和Filesystem Cache的数据可能会丢失,ES是通过translog的机制来保证数据的可靠性的。其实现机制是接收到请求后,同时也会写入到translog中,当Filesystem cache中的数据写入到磁盘中时,才会清除掉,这个过程叫做flush;
- 在flush过程中,内存中的缓冲将被清除,内容被写入一个新段,段的fsync将创建一个新的提交点,并将内容刷新到磁盘,旧的translog将被删除并开始一个新的translog。
- flush触发的时机是定时触发(默认30分钟)或者translog变得太大(默认为512M)时;

补充:关于Lucene的Segement:
- Lucene索引是由多个段组成,段本身是一个功能齐全的倒排索引。
- 段是不可变的,允许Lucene将新的文档增量地添加到索引中,而不用从头重建索引。
- 对于每一个搜索请求而言,索引中的所有段都会被搜索,并且每个段会消耗CPU的时钟周、文件句柄和内存。这意味着段的数量越多,搜索性能会越低。
为了解决这个问题,Elasticsearch会合并小段到一个较大的段,提交新的合并段到磁盘,并删除那些旧的小段。
详细描述一下Elasticsearch更新和删除文档的过程。
删除和更新也都是写操作,但是Elasticsearch中的文档是不可变的,因此不能被删除或者改动以展示其变更;
- 磁盘上的每个段都有一个相应的.del文件。当删除请求发送后,文档并没有真的被删除,而是在.del文件中被标记为删除。该文档依然能匹配查询,但是会在结果中被过滤掉。当段合并时,在.del文件中被标记为删除的文档将不会被写入新段。
在新的文档被创建时,Elasticsearch会为该文档指定一个版本号,当执行更新时,旧版本的文档在.del文件中被标记为删除,新版本的文档被索引到一个新段。旧版本的文档依然能匹配查询,但是会在结果中被过滤掉。
详细描述一下Elasticsearch搜索的过程。
搜索被执行成一个两阶段过程,我们称之为 Query Then Fetch;
- 在初始查询阶段时,查询会广播到索引中每一个分片拷贝(主分片或者副本分片)。 每个分片在本地执行搜索并构建一个匹配文档的大小为 from + size 的优先队列。PS:在搜索的时候是会查询Filesystem Cache的,但是有部分数据还在Memory Buffer,所以搜索是近实时的。
- 每个分片返回各自优先队列中 所有文档的 ID 和排序值 给协调节点,它合并这些值到自己的优先队列中来产生一个全局排序后的结果列表。
- 接下来就是 取回阶段,协调节点辨别出哪些文档需要被取回并向相关的分片提交多个 GET 请求。每个分片加载并 丰富 文档,如果有需要的话,接着返回文档给协调节点。一旦所有的文档都被取回了,协调节点返回结果给客户端。
- 补充:Query Then Fetch的搜索类型在文档相关性打分的时候参考的是本分片的数据,这样在文档数量较少的时候可能不够准确,DFS Query Then Fetch增加了一个预查询的处理,询问Term和Document frequency,这个评分更准确,但是性能会变差。
客户端在和集群连接时,如何选择特定的节点执行请求的?
- TransportClient利用transport模块远程连接一个elasticsearch集群。它并不加入到集群中,只是简单的获得一个或者多个初始化的transport地址,并以 轮询 的方式与这些地址进行通信。

若有收获,就点个赞吧
0 人点赞
