图的表示
邻接矩阵
相连的标1,不相连的为0:
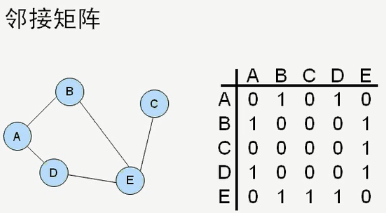
#ifndef GRAPHVERTEX_H#define GRAPHVERTEX_H#include <iostream>//节点class Vertex{public:Vertex(char lab):lab(lab){}private:char lab;};//图class Graph{public:Graph();~Graph();void addVertex(char lab);void addEdge(int start, int end);void printMatrix();private:Vertex* list[20]; //保存图的每个节点int num; //节点个数int Mat[20][20]; //邻接矩阵};Graph::Graph(){num = 0;for (int i = 0; i < 20; i++)for (int j = 0; j < 20; j++)Mat[i][j] = 0;}Graph::~Graph(){for (int i = 0; i < num; i++)delete list[i];}void Graph::addVertex(char lab){list[num++] = new Vertex(lab);}void Graph::addEdge(int start, int end){//对称,A-B和B-A都要置1Mat[start][end] = 1;Mat[end][start] = 1;}void Graph::printMatrix(){for (int i = 0; i < num; i++){for (int j = 0; j < num; j++)std::cout<<Mat[i][j]<<" ";std::cout<<std::endl;}}#endif // GRAPHVERTEX_H
邻接表
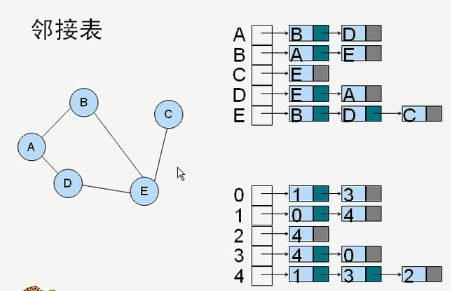
#ifndef GRAPHTABLE_H#define GRAPHTABLE_H#include <list>#include <iostream>//图template<typename T>class Graph{public:Graph(const int num):n(num){vertexList = new T*[n];headNodes = new std::list<int>[n];//一个节点对应一个链表nVerts = 0;}~Graph(){delete [] vertexList;delete [] headNodes;}void addVertex(T* lab);void addEdge(int start, int end);void printNodes();void printLines();private:T** vertexList; //保存所有节点的列表std::list<int>* headNodes;int n; //节点个数int nVerts; //计数用};template<typename T>void Graph<T>::addVertex(T* lab){vertexList[nVerts++] = lab;}template<typename T>void Graph<T>::addEdge(int start, int end){headNodes[start].push_back(end);headNodes[end].push_back(start);}template<typename T>void Graph<T>::printNodes(){for(int i=0; i<nVerts; i++)std::cout<<*vertexList[i]<<" ";std::cout<<std::endl;}template<typename T>void Graph<T>::printLines(){for(int i=0; i<nVerts; i++){std::cout<<i<<"->";for(std::list<int>::iterator it=headNodes[i].begin(); it!=headNodes[i].end(); it++)std::cout<<*it<<"->";std::cout<<"end"<<std::endl;}}#endif // GRAPHTABLE_H
图的搜索
DFS深度优先搜索—>使用栈
从起点开始沿着一条路径走到头,再往回返一个节点,再走另一条路径:
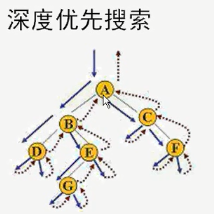
//下列代码基于邻接矩阵图,类代码请参考上面代码void Graph::showVertex(int index){//v为节点下标std::cout<<list[index]->lab<<" ";}int Graph::getNextUnVisitedVertex(int index){for (int i=0; i<num; i++){if(Mat[index][i] == 1 && list[i]->isVisited == false)return i;}return -1;}void Graph::DFS(){stack<int> gStack;//栈用来保存节点的index//从0个节点开始显示list[0]->isVisited = true;showVertex(0);gStack.push(0);//将访问过的节点放入栈int index;while (gStack.size() > 0){index = getNextUnVisitedVertex(gStack.top());if (index == -1){gStack.pop();//往回返一个节点,删除当前}else{list[index]->isVisited = true;showVertex(index);gStack.push(index);}}for(int i=0; i<num; i++)list[i]->isVisited = false;//还原记得状态}
BFS广度优先搜索—>使用队列
从起点开始,遍历所有与该节点相连的节点,一次往后:
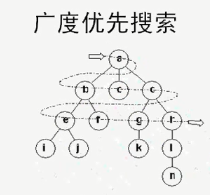
void Graph::BFS()
{
queue<int> gQueue;//保存访问过的节点index
//从0个节点开始显示
list[0]->isVisited = true;
showVertex(0);
gQueue.push(0);//将访问过的节点放入栈
int index;
while (gQueue.size() > 0)
{
index = getNextUnVisitedVertex(gQueue.front());
while (index != -1)
{
//找出当前节点所有关联节点,放入队列
list[index]->isVisited = true;
showVertex(index);
gQueue.push(index);
index = getNextUnVisitedVertex(gQueue.front());
}
gQueue.pop();//删除当前节点,因为已经show
}
for(int i=0; i<num; i++)
list[i]->isVisited = false;//还原记得状态
}

若有收获,就点个赞吧
0 人点赞
