问:老哥们 你们做过地图车辆行驶轨迹吗 ,要把行驶轨迹重现出来, 但是存经纬度的话 点很密 ,数据量太大了 ?
答:用高德地图,千万别用百度。数据库用hbase/lindorm这种,入库前用gps的算法计算出在地图上物理坐标点,然后从hbase里取最后一个点,然后两个点比对,距离太近比如1米以下,就不要入库了
就是gps点去掉不影响画图的,不一定是按距离,还按弯曲程度,(对gps轨迹数据进行抽稀 算法
)只要不弯曲,不管多远都会过滤
背景
在对行车轨迹在地图上进行展示时,往往需要绘制大量的坐标点,但是设备取点的间隔往往是固定的,传统的做法是将所有的点绘制出来,极大地消耗了浏览器的性能。然而在一条轨迹上,两点便可以确定一条直线,因此在行驶路径比较直的区域,很多坐标点都是可以舍弃的,同时,当对地图进行缩小,使可视区域变大时,坐标点也不必绘制地十分精确,往往取一些关键点就能绘制出行驶轨迹。Douglas-Peuker正是一个对坐标关键点进行抽取的算法。
算法原理
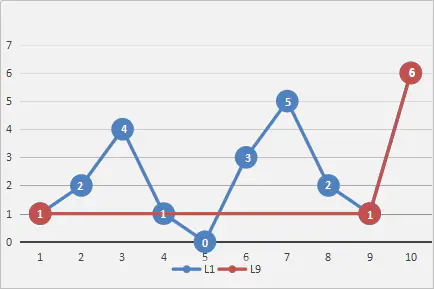
1. 将轨迹的首尾点连成一条线,计算曲线上每一个点到直线的距离,找出最大距离dmax,看距离是否小于给定的阈值max(及轨迹精确度)。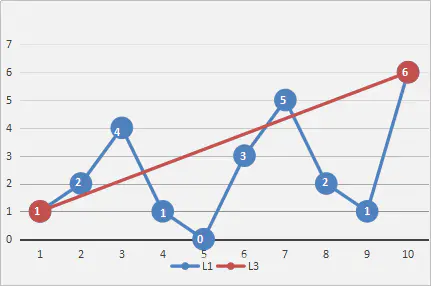
2. a.若dmax < max,则舍弃这条曲线上的所有中间点,将曲线首尾点连成的直线作为这段曲线的近似,这条线段便处理完毕。
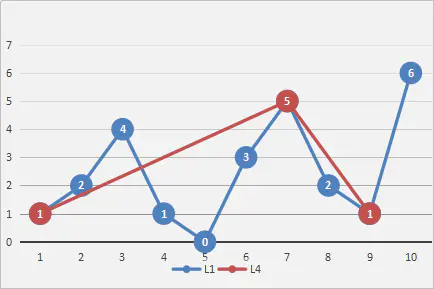
b.若dmax >= max,则以dmax所在点作为分割点,将原来的曲线分为两段,分出来的两条曲线继续直线步骤1、2,直到所有的dmax < max。
显然,算法的抽稀精读是和阈值相关的,阈值越大,舍弃的点越多,提取的关键点越少。若绘制的轨迹较长,可在对地图进行缩放时动态调整阈值。
代码实现
/*** gps轨迹抽稀算法* @author: Z1hgq*//*** 点到直线的距离,直线方程为 ax + by + c = 0* @param {Number} a 直线参数a* @param {Number} b 直线参数b* @param {Number} c 直线参数c* @param {Object} xy 点坐标例如{ lat: 2, lng: 2 }* @return {Number}*/function getDistanceFromPointToLine(a, b, c, xy) {const x = xy.lng;const y = xy.lat;return Math.abs((a * x + b * y + c) / Math.sqrt(a * a + b * b));}/*** 根据两个点求直线方程 ax+by+c=0* @param {Object} xy1 点1,例如{ lat: 1, lng: 1 }* @param {Object} xy2 点2,例如{ lat: 2, lng: 2 }* @return {Array} [a,b,c] 直线方程的三个参数*/function getLineByPoint(xy1, xy2) {const x1 = xy1.lng; // 第一个点的经度const y1 = xy1.lat; // 第一个点的纬度const x2 = xy2.lng; // 第二个点的经度const y2 = xy2.lat; // 第二个点的纬度const a = y2 - y1;const b = x1 - x2;const c = (y1 - y2) * x1 - y1 * (x1 - x2);return [a, b, c];}/*** 稀疏点* @param {Array} points 参数为[{lat: 1, lng: 2},{lat: 3, lng: 4}]点集* @param {Number} max 阈值,越大稀疏效果越好但是细节越差* @return {Array} 稀疏后的点集[{lat: 1, lng: 2},{lat: 3, lng: 4}],保持和输入点集的顺序一致*/function sparsePoints(points, max) {if (points.length < 3) {return points;}const xy1 = points[0]; // 取第一个点const xy2 = points[points.length - 1]; // 取最后一个点const [a, b, c] = getLineByPoint(xy1, xy2); // 获取直线方程的a,b,c值let ret = []; // 最后稀疏以后的点集let dmax = 0; // 记录点到直线的最大距离let split = 0; // 分割位置for (let i = 1; i < points.length - 1; i++) {const d = getDistanceFromPointToLine(a, b, c, points[i]);if (d > dmax) {split = i;dmax = d;}}if (dmax > max) {// 如果存在点到首位点连成直线的距离大于max的,即需要再次划分// 按split分成左边一份,递归const child1 = sparsePoints(points.slice(0, split + 1), max);// 按split分成右边一份,递归const child2 = sparsePoints(points.slice(split), max);// 因为child1的最后一个点和child2的第一个点,肯定是同一个(即为分割点),合并的时候,需要注意一下ret = ret.concat(child1, child2.slice(1));return ret;} else {// 如果不存在点到直线的距离大于阈值的,那么就直接是首尾点了return [points[0], points[points.length - 1]];}}export default sparsePoints;
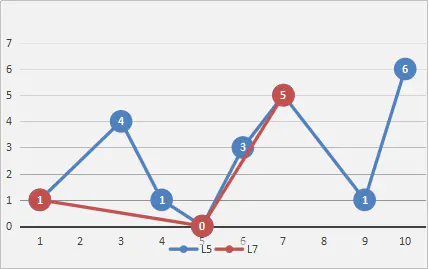
效果展示
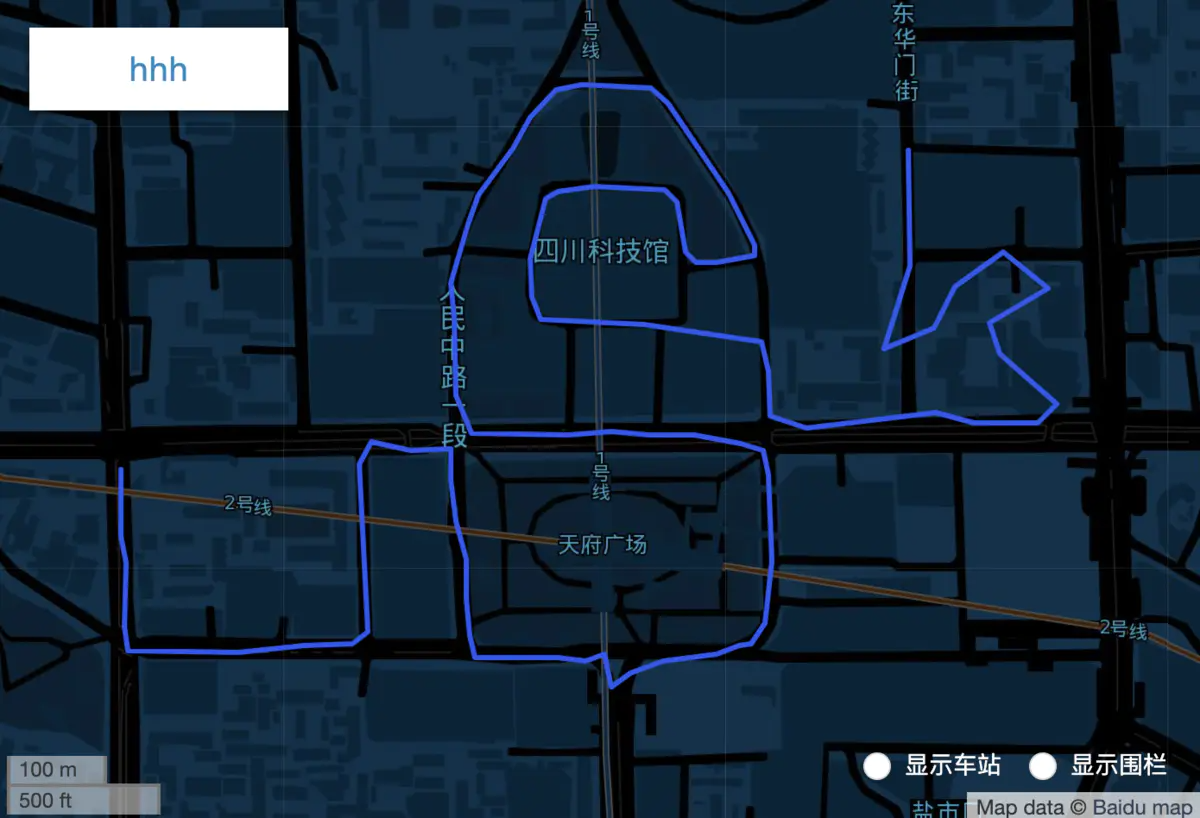
数据点类型为类似30.664147,104.067232,抽稀阈值为0.000005,第一张图为原始gps数据,共265个点,第二张图为抽稀之后的数据,共108个点。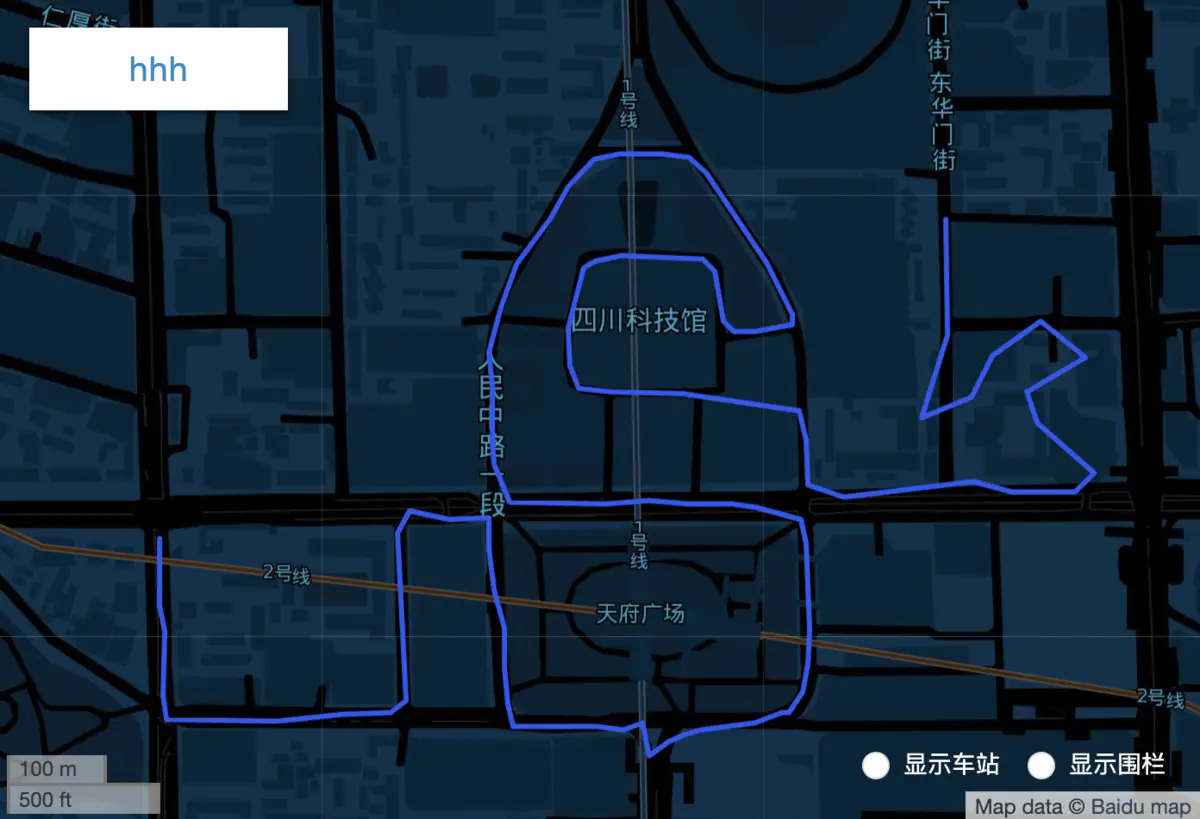

若有收获,就点个赞吧
0 人点赞
