概述
- 建议先了解空间位姿计算基本概念,了解陀螺仪传感器各组件功能和原理
- 陀螺仪有三轴,六轴,九轴,之间的区别就是这个器件是否有三轴的加速度计,三轴的速度计和三轴的磁力计
- 而器件返回的原始数据(加速度,速度,磁场强度)均不是我们想要的数据
- 在使用过程中,我们更关心的是物体在空间的位姿,及与XYZ三个轴之间的角度(俯仰角,横滚角和航向角,即欧拉角或四元数),因此需要对原始数据进行处理
- 从理论上,仅需其中任何一种传感器(三轴的加速度计,三轴的速度计和三轴的磁力计),即可计算得知欧拉角
- MPU6050芯片上集成了数据融合模块DMP可以使用,直接返回欧拉角或四元数,这里避开DMP,研究数据融合原理,研究误差产生原因
- 在全局定位的应用中,我们更关心平台的航向角
加速度计获取角度
- 从原理上得知加速度计可以感知该轴向上的加速度大小,因此结合重力或两个轴即可得知横滚角和俯仰角的大小
- 以俯仰角举例如图
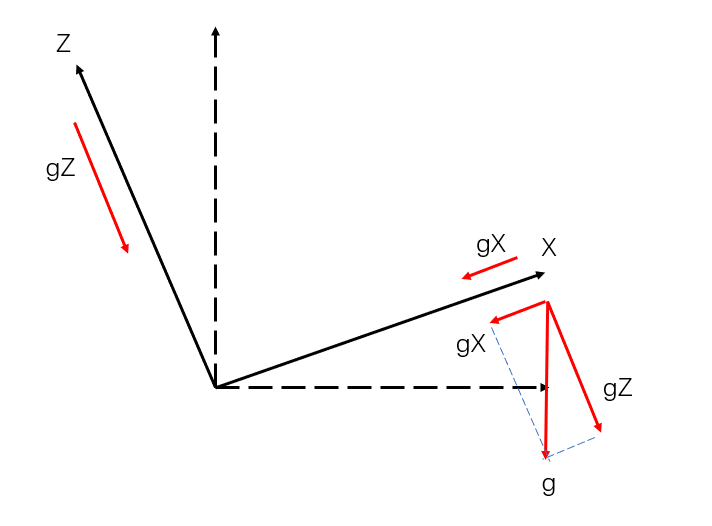
X轴加速度gX,Z轴加速度gZ,与重力加速度存在如图几何关系
因此俯仰角(载体坐标系X轴和导航坐标系X轴夹角)为

横滚角同理
然而航向角无法使用此方法,应为当航向转动时,
为定值
- 优点:
- 在稳定的平台上测量角度准确且稳定,可以作为绝对数据而参考
- 局限性:
- 使用加速度计测量角度时,要求平台绝对静止或匀速运动,即除重力外无任何加速度影响
- 而绝大多数的使用场合中,物体要经历加速减速等抖动过程,导致不能始终获得准确位姿
- Z轴航向角无法使用
速度计获取角度
- 从原理上得知速度计可以感知各个轴的速度变化,由


即可计算各个轴转过的角度(俯仰,横滚,航向都可计算)
- 优点:
- 抗抖动能力强,即便物体在加速减速过程中也可感知角度变化
- 局限性:
- 存在累积误差,受噪声影响大,禁不起时间的考验
- 当非均角速度运动时误差很大
- 没有绝对角度供参考,相当于传感器在盲算
磁力计获取角度
- 从原理上得知测力计可以感知各个轴向的磁场强度
- 计算方法同加速度计测量角度,只不过将重力换成北极的磁场强度
- 由于北极的磁场强度不确定,因此建议采用将两轴磁场强度结合后计算的角度
- 计算所得的角度是以北极方向作为参考的相对角度
- 理论上可计算各个轴转过的角度(俯仰,横滚,航向都可计算),但计算航向角时效果更加
- 可以理解为一个电子罗盘作用
- 优点:
- 在无磁场干扰的环境中测量角度准确且稳定,可以作为绝对数据而参考
- 局限性:
- 受磁场影响大,当周围环境存在复杂的磁场(电机,强电流变化)时,失去准确性
- 因为在俯仰,横滚中,小角度的磁场变化不明显,更多的用在航向计算中
芯片范例
MPU6050
六轴陀螺仪传感器,无磁力计
MPU9250
九轴陀螺仪模块

若有收获,就点个赞吧
0 人点赞
