测试机构
关于测试机构说明,见陀螺仪小型测试平台
测试工程
整个对陀螺仪测试的代码工程都记录在Github上的一个项目中,项目还会随着进展进行更新
项目URL:https://github.com/HITLIVING/-RT-Thread-.git
可以通过Pull下来整个项目进一步了解
对测试功能的实现需要格外关注gyroscope_app.cgyroscope_app.h
两个文件
测试方案与步骤
- 完成对MPU6050的驱动
- 读取MPU6050的原始数据
- 设计对原始数据的处理过程
- 对去除偏移量后的数据做信号分析
- 添加滤波器
- 滤波器作用在去除偏移量后的数据
- 静态角速度积分角度计算
- 动态角速度积分角度计算
MPU6050驱动
- 因为最近在学习RT-Thread,而且正好用Mini开发板写了个操作界面,
- 于是顺手也就把对陀螺仪模块的驱动写在里面了,如果想把数据反馈在显示屏上也方便
- MPU6050买的是淘宝上10块多的模块,也只是为了验证算法的正确性,模块直接固定在旋转平台上
- 关于I2C的驱动直接使用的是RT-Thread的驱动,也很方便,节省了一些时间
- 同时RT-Thread官方也提供了MPU6050的驱动库,直接添加在工程下
- 完整驱动代码参照团队的RT-Thread教程【RT-Thread】模拟I2C_MPU6050
这里说一下本次测试设置的MPU6050的关键参数**
陀螺仪(速度计)量程500dps
加速度计量程2g(虽然没用到)
采样率200Hz
调用驱动的函数并修改参数即可完成配置
当前芯片工作环境26℃
读取MPU6050原始数据
- 通过【方案资料】的分析内容,我们重点关注Z轴角速度的输出数据
- 直接通过RT-Thread的打印函数,通过串口,将数据打印在Finsh指令窗口内
- 使用山外多功能调试助手将打印的数据保存在.csv文件内
- 通过excel打开把.csv转成.xlsx
- 用matlab读取.xlsx文件内的数据绘制波形分析
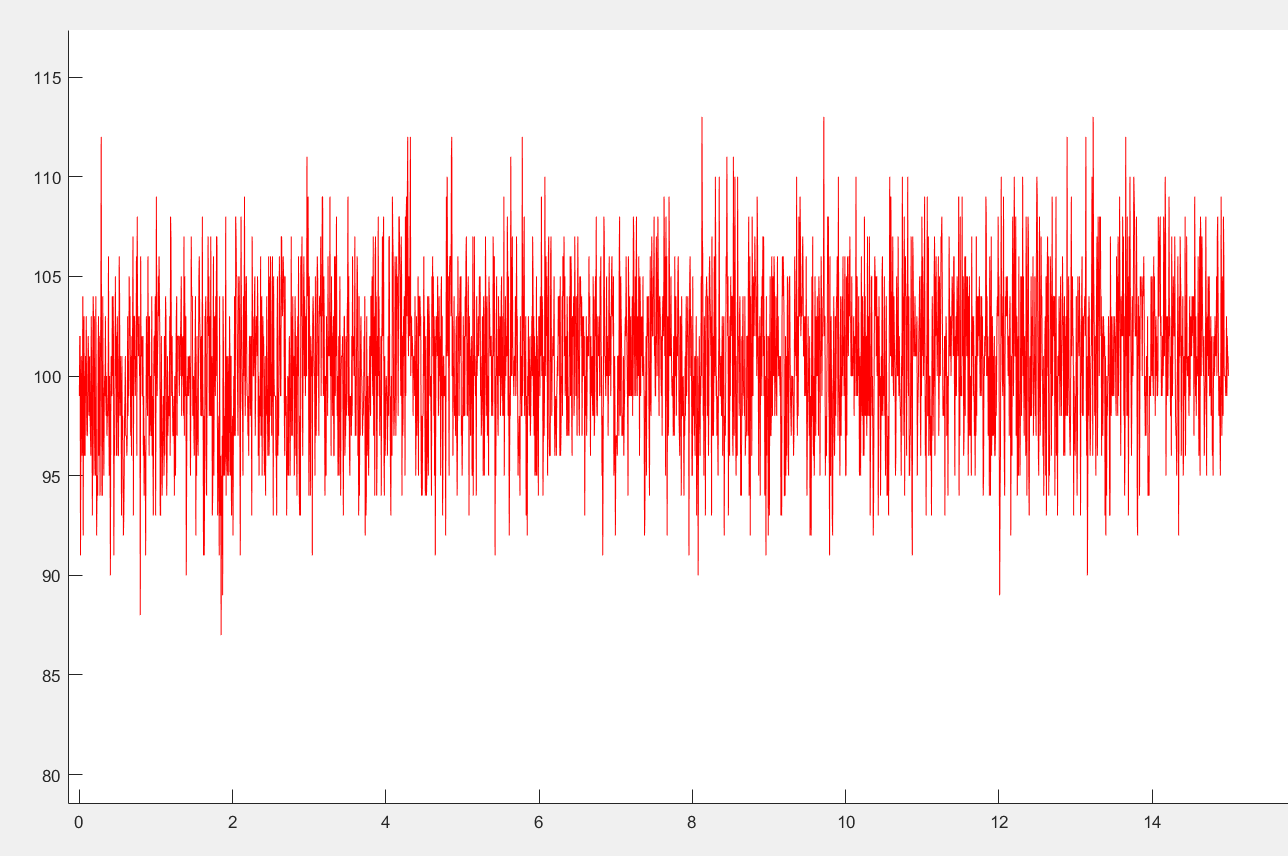
图为采样了3000个原始数据后绘制的波形
可以看到
- 存在较大的零点偏移
- 噪声明显
可以通过求和取平均值来消除偏移量,采样多少个数据取平均作为偏移量比较合适,下表通过采集不同数量的采样点比较平均值的变化,采样频率为200Hz
- 从零计数 | 采样点数/个 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | | 采样时间/s | 1 | 2.5 | 5 | 10 | 15 | 20 | 25 | 30 | | 平均值 | 99.72 | 99.99 | 100.348 | 100.5 | 100.637 | 100.826 | 100.939 | 101.054 |
如果采用前200个点平均值99.72作为偏移量,在30s后平均值为101.54,角速度零点就会偏差
(101.54-99.72)*(500/32736)=0.027dps
这样三分钟后角速度的零点大约偏差0.027*6=0.162dps,
这样如果全局定位静止不动,在三分钟后,每秒的角度偏差大约0.162。
可以发现平均值在一直上升,而尤其时刚开机时上升幅度较大,随着时间上升幅度变缓
这种现象有可能是芯片刚供电,数据起步存在坏点,
这次我们采样了15000个点观察数据的变化趋势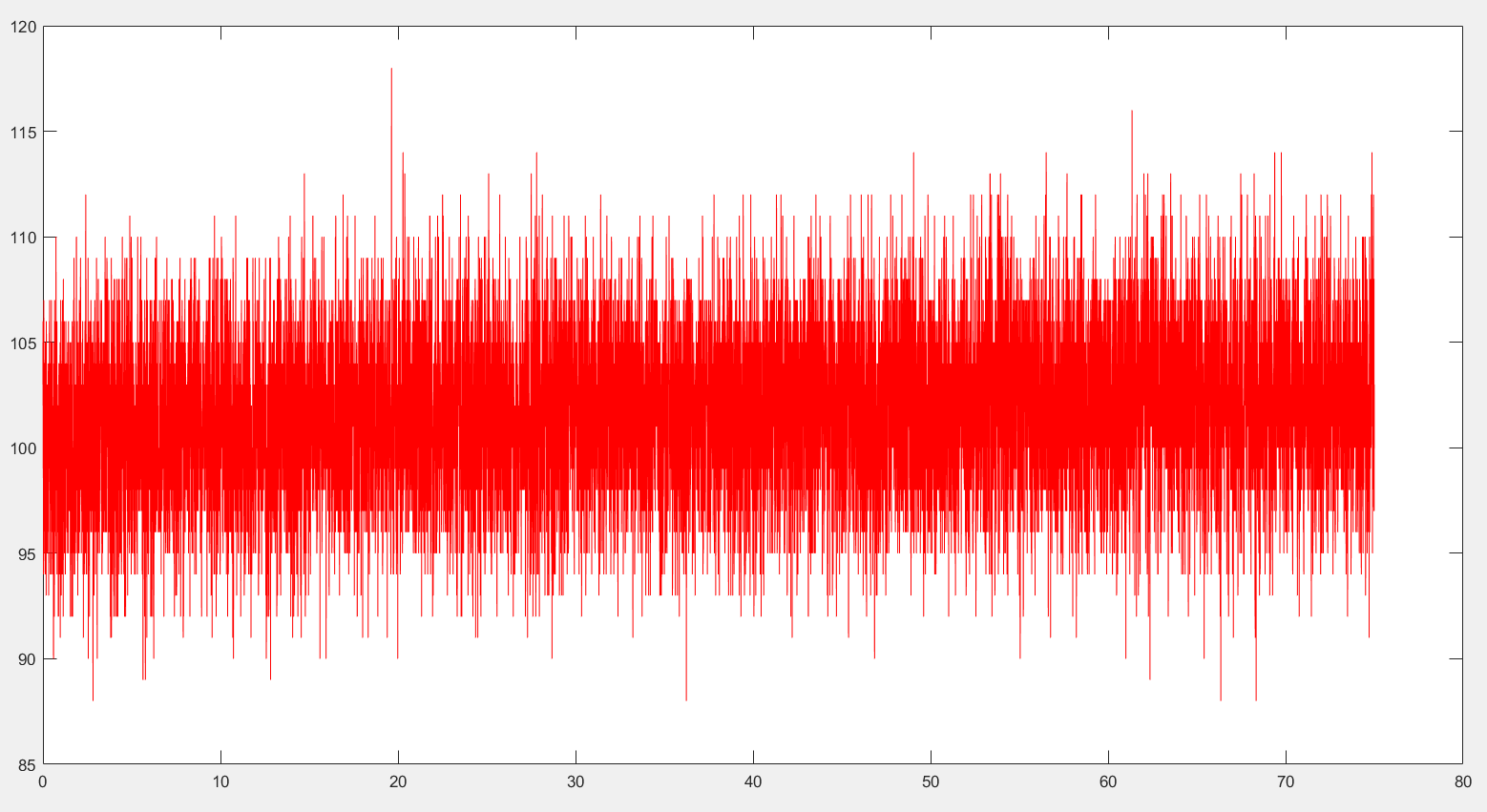
如果抛弃了前10s数据点,我们从10s后采样取平均数
- 从10s后采样 | 采样点数/个 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 | | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | :—-: | | 采样时间/s | 1 | 2.5 | 5 | 10 | 15 | 20 | 25 | 30 | | 平均值 | 101 | 100.8 | 100.8 | 101 | 101.2 | 101.3 | 101.38 | 101.42 |
如果采用前200个点平均值99.72作为偏移量,在30s后平均值为101.54,角速度零点就会偏差
(101.42-101)*(500/32736)=0.0064dps
但是这样全局定位从开机到正常工作需要10+1=11s,这个时间较长
- 从5s后采样
我们再尝试如果抛弃了前5s数据点,我们从5s后采样取平均数
| 采样点数/个 | 200 | 500 | 1000 | 2000 | 3000 | 4000 | 5000 | 6000 |
|---|---|---|---|---|---|---|---|---|
| 采样时间/s | 1 | 2.5 | 5 | 10 | 15 | 20 | 25 | 30 |
| 平均值 | 100.3 | 100.4 | 100.7 | 100.78 | 100.98 | 101.08 | 101.2 | 101.27 |
如果采用前200个点平均值100.3作为偏移量,在30s后平均值为101.27,角速度零点就会偏差
(101.27-100.3)*(500/32736)=0.0148dps
这样全局定位从开机到正常工作需要5+1=6s
从表中可以看出角速度平均值随时间近似为线性增长,三分钟后角速度的零点大约偏差0.0148*6=0.088dps,
这样如果全局定位静止不动,在三分钟后,每秒的角度偏差大约0.088°<0.1°
实际上,当采用除速度计之外数据进行融合后,这种数据漂移会得到抑制,见陀螺仪数据融合
因此折中考虑,我们采用连续采样5s后取平均作为偏差值
如果采用前1000个点平均值100.348作为偏移量,在30s后平均值为101.42,角速度零点就会偏差
(101.42-100.348)(500/32736)=0.0164dps
这样三分钟后角速度的零点大约偏差0.01646=0.098dps,
这样如果全局定位静止不动,在三分钟后,每秒的角度偏差大约0.1°
设计对原始数据的处理过程
这样,对原始数据的处理要经过三个阶段
- 采样5s
- 对这5s数据取平均
- 读取减去平均后的数据并单位换算
MPU6050单位换算的方法见
https://www.cnblogs.com/uestcman/p/9433871.html
- 处理流程的实现
#define OFFSET_SAMPLE 1000float offset_sample = 0; //偏移量计算采样数void gyr_schedule(void){//********************** Sample Period test **************************//tick_now=rt_tick_get();tick_delta = tick_now-tick_last;tick_last = tick_now;switch(gyr_step){case gyr_sample:{gyr_sample_dataGet();offset_sample++;if(offset_sample==OFFSET_SAMPLE)gyr_step = gyr_samplecul;break;}case gyr_samplecul:{gyr_sample_cul();gyr_step = gyr_deal;break;}case gyr_deal:{gyr_data_deal();break;}default:break;}}
- 处理流程的调度器
void gyr_schedule(void)放在了一个线程内循环进行 - 为了控制运算频率,调度器被延迟周期调用,设计为每5ms调用一次
- 但是会存在程序运行占用时间而计算周期被拉长,此时还当作5ms计算时会导致角度计算结果偏小
- 因此在调度器使用RT-Thread的tick读取函数,计算连续两次被调用之间的时间间隔作为采样周期参与运算
- 宏定义
OFFSET_SAMPLE作为采样取平均的点数定义,5s即采样1000个点 - 详细代码见工程下的
gyroscope_app.c和gyroscope_app.h两个文件
对去除偏移量后的数据做信号分析
去除偏移量并对数据做了单位变换后测试了5614个点
波形如图
- 时域上
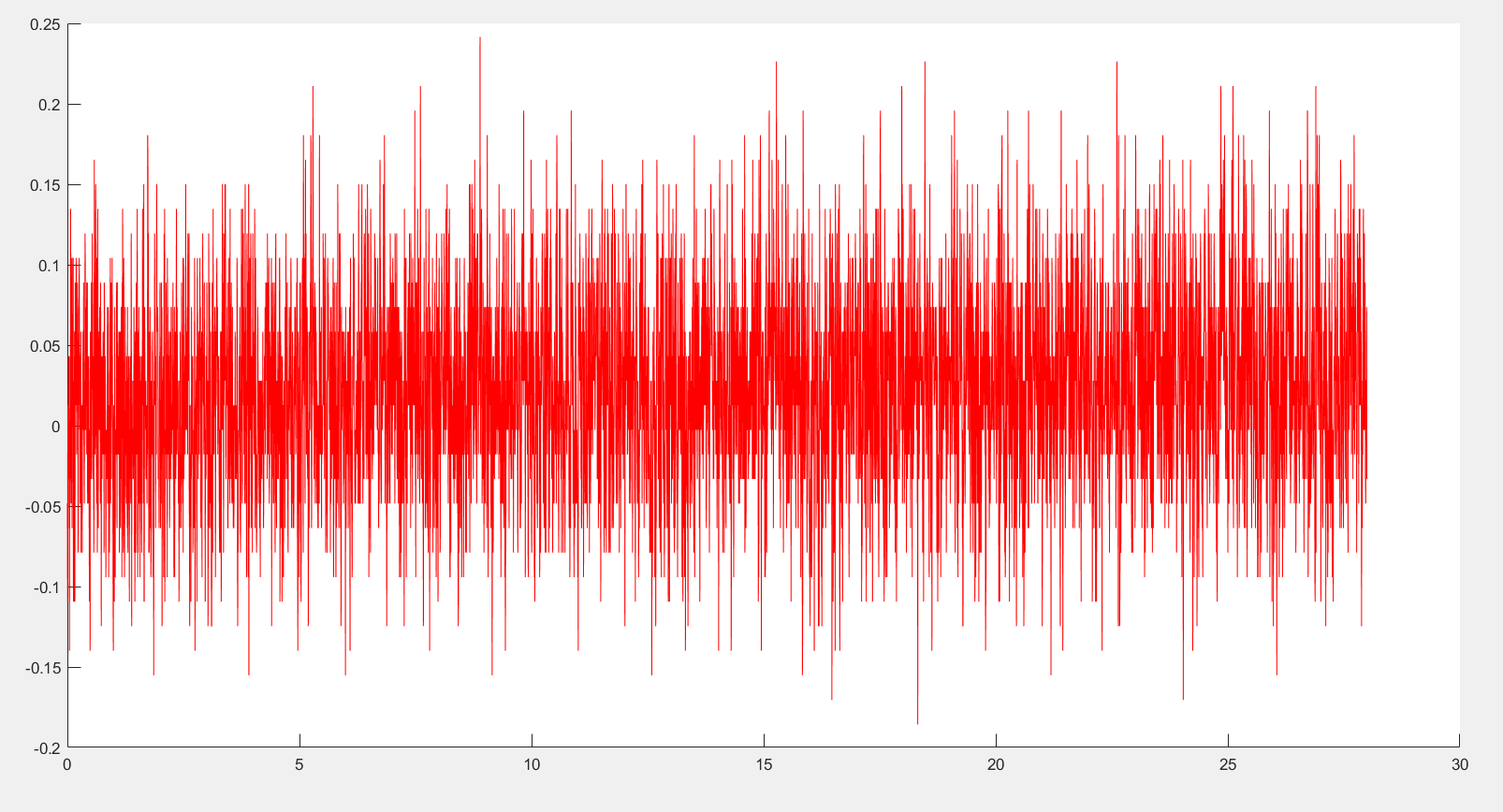
- 从时域上可以看出除去偏移量后速度计的返回值基本在0上下波动
这5600多的点的平均值为0.0228°,仍存在向上偏移的趋势
频域上
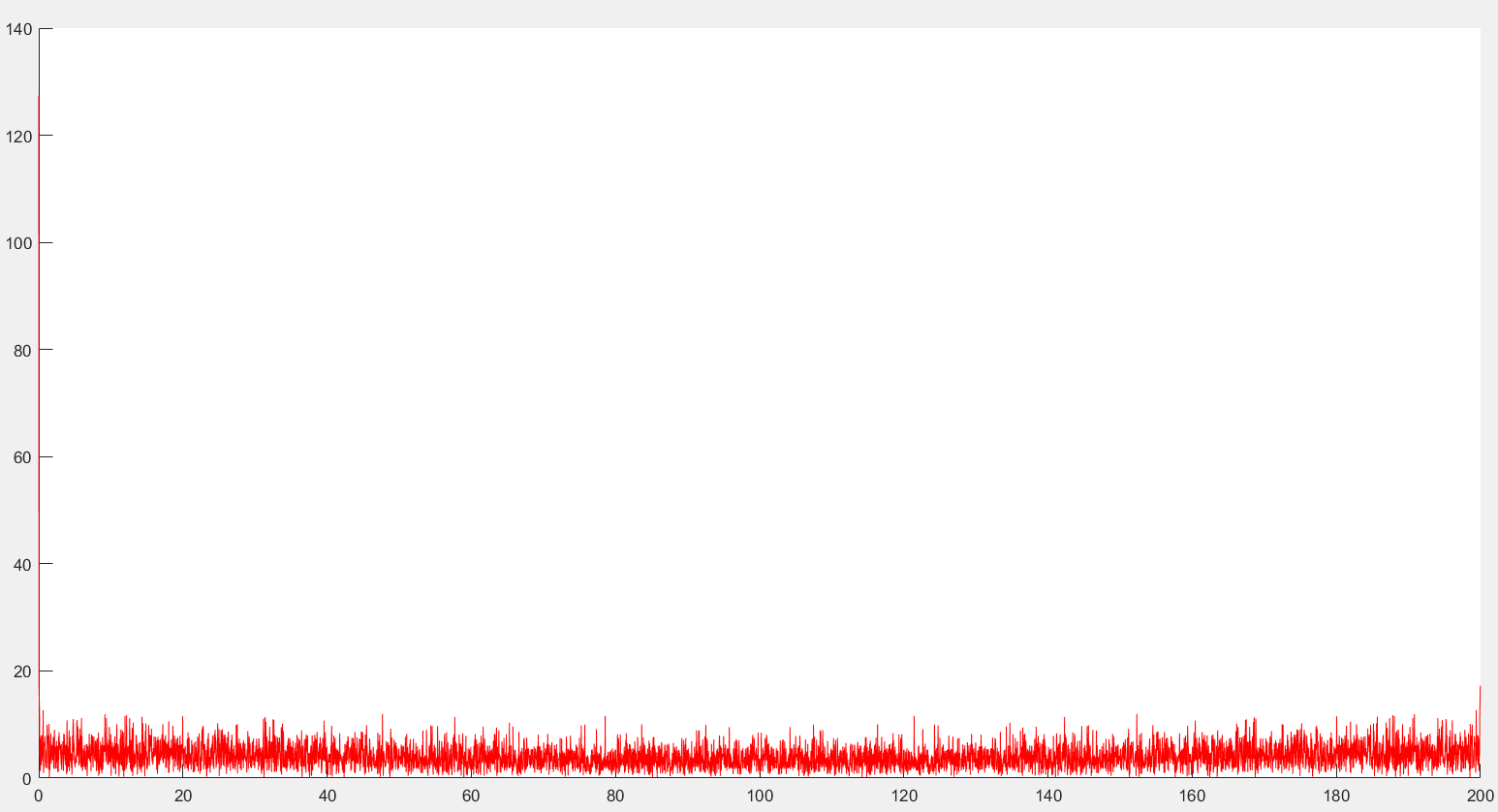
- 对这段信号做傅里叶变换后,可以观察频域上的信号特征
- 可以看到除了有偏移带来的直流信号(低频信号)外,还有频率丰富的噪声信号
- 噪声信号满足热噪声信号的特征(高斯白噪声)
添加滤波器
根据前面的分析,我们尝试将信号通过Kalman滤波器,观察滤波后的信号特征
滤波器的结构见
Kalman滤波器
详细代码实现见工程中 kalman_math.c 和 kalman_math.h 两个文件
- 初始化
在陀螺仪的初始化中完成对Kalman滤波器的初始化,赋予参量的初始值
//********************** Kalman Filter Struct **************************//struct KalmanParam KalParam_gz;#define KalParam_gz_LastP 0.02#define KalParam_gz_Q 0.001#define KalParam_gz_R 0.543void gyroscope_init(void){/* init the mpu6050 drive */mpu6050_hw_init();rt_thread_mdelay(50);/* Display the temp of mpu6050*/char str_temp[5]={0};mpu6050_temperature_get(&temp);sprintf(str_temp, "%d", temp/100);/* Init the Kalman Filter on g_Z*/KalmanParamInit(&KalParam_gz,KalParam_gz_LastP,KalParam_gz_Q,KalParam_gz_R);}
滤波器的参数是在Matlab的调试中选取了一个滤波效果比较好的,而具体的计算依据还需要研究
在数据处理的调度器的第三个环节数据处理过程中,添加对滤波器的调用
void gyr_data_deal(void){mpu6050_gyroscope_get(&orignal_gx, &orignal_gy, &orignal_gz);real_gz = (orignal_gz-offset_gz)/65.534;KalmanParamUpdate(&KalParam_gz, real_gz);printf("%f,%f\n",real_gz,KalParam_gz.out);}
并将滤波器处理先后的数据均导出到matlab分析
滤波器作用在去除偏移量后的数据
- 时域上
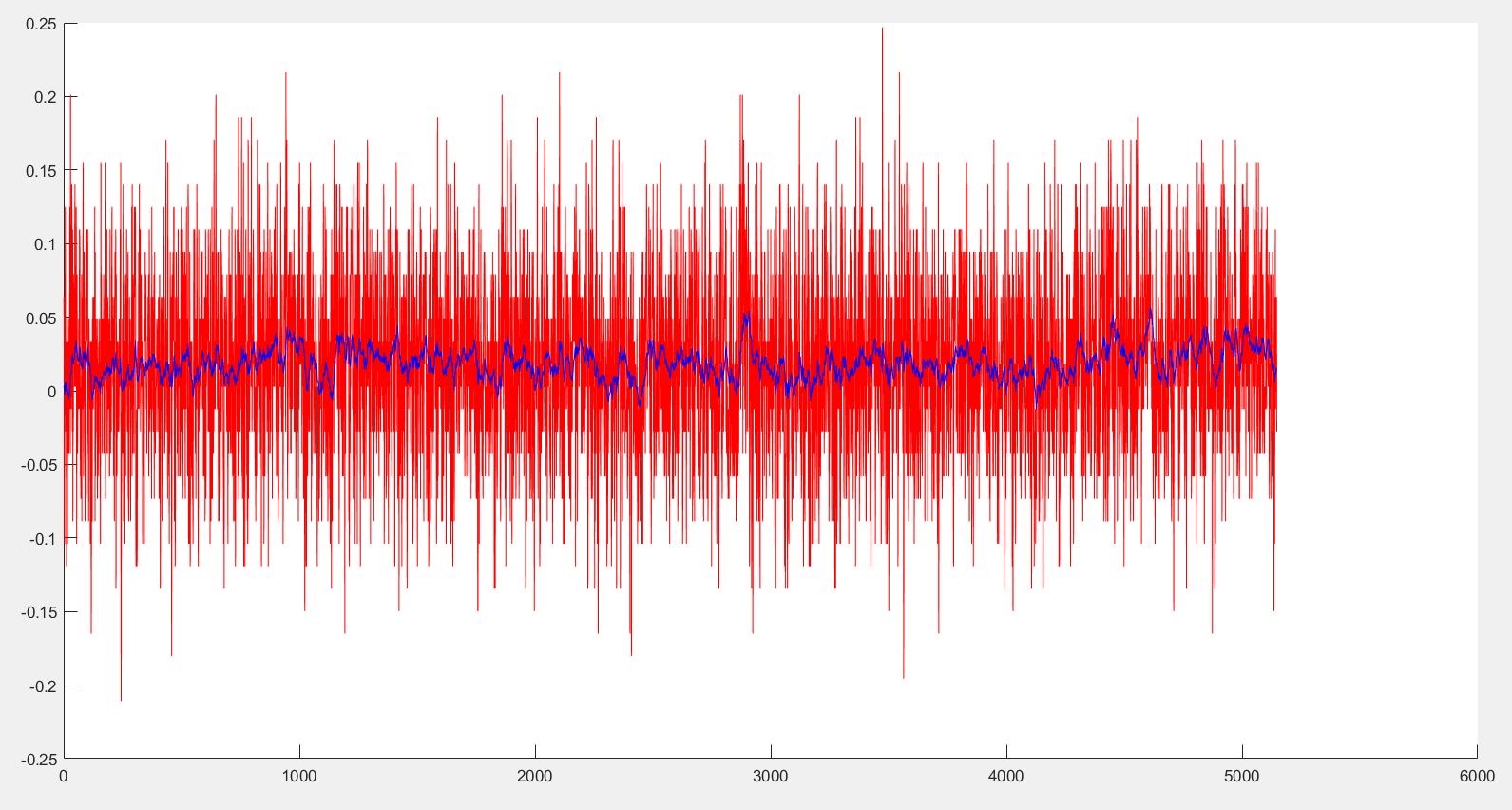
- 红色为滤波前信号,蓝色为滤波后
- 可以看到静止状态下滤波前信号的起伏范围为-0.2~0.2,经过滤波后信号的起伏范围仅在0~0.05
滤波后的信号起伏范围负数较少,主要是因为输入信号平均值的漂移影响了滤波器的输出
频域上
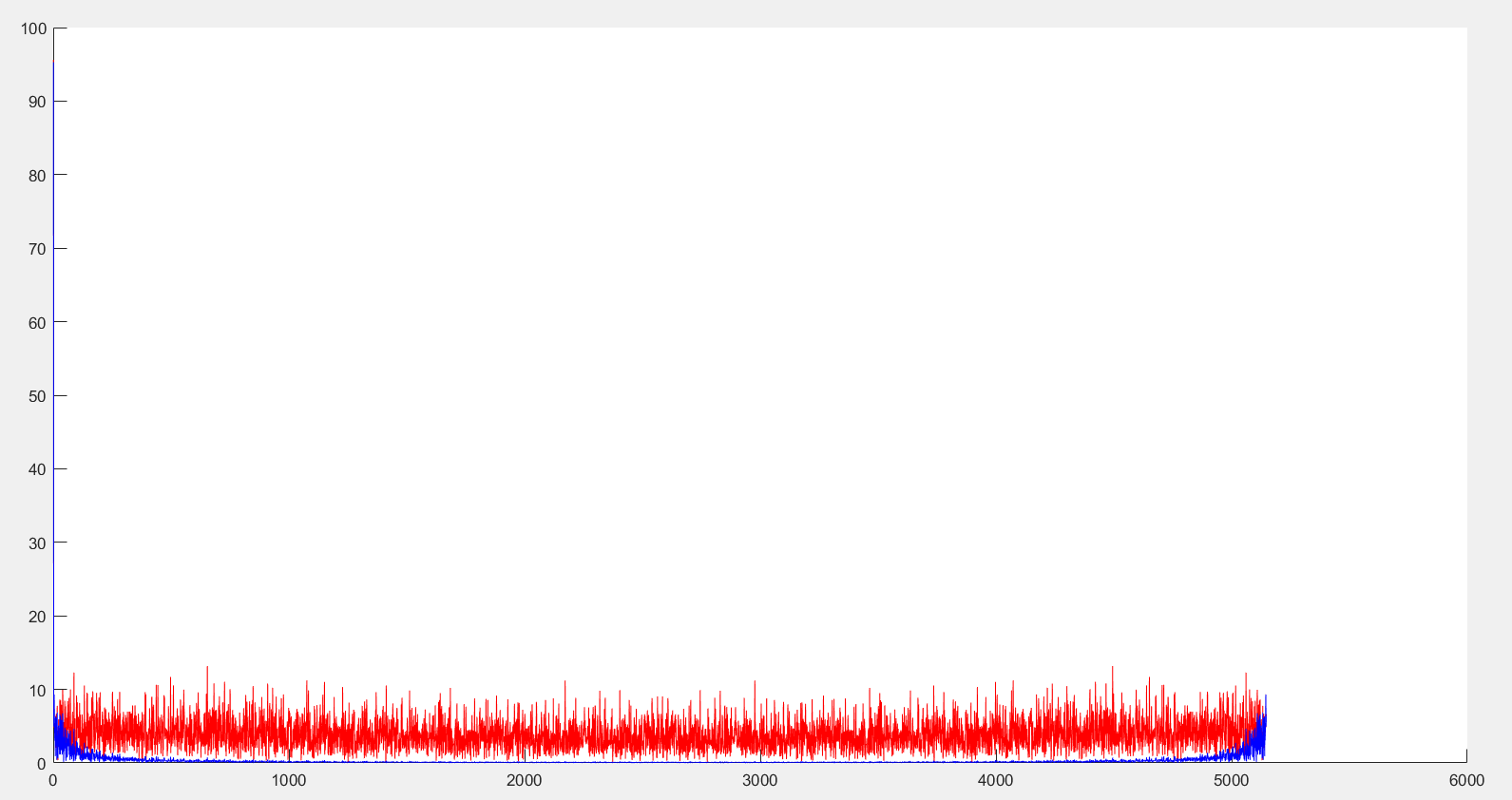
- 红色为滤波前信号,蓝色为滤波后
可以看到噪声信号得到了有效的抑制,保留了有效的低频数据信号和少量低频噪声
可能存在更好滤波器参数,我们保留当前结果展开下一步
静态角速度积分角度计算
- 对滤波器输出的角速度乘以采样时间进行积分,即可得到通过角速度计计算所得的陀螺仪当前角度
- 同样在陀螺仪调度的第三个阶段数据处理中完成此过程
Angle_z+=KalParam_gz.out*tick_delta*0.001;
先测试静止情况下陀螺仪的角度计算返回情况
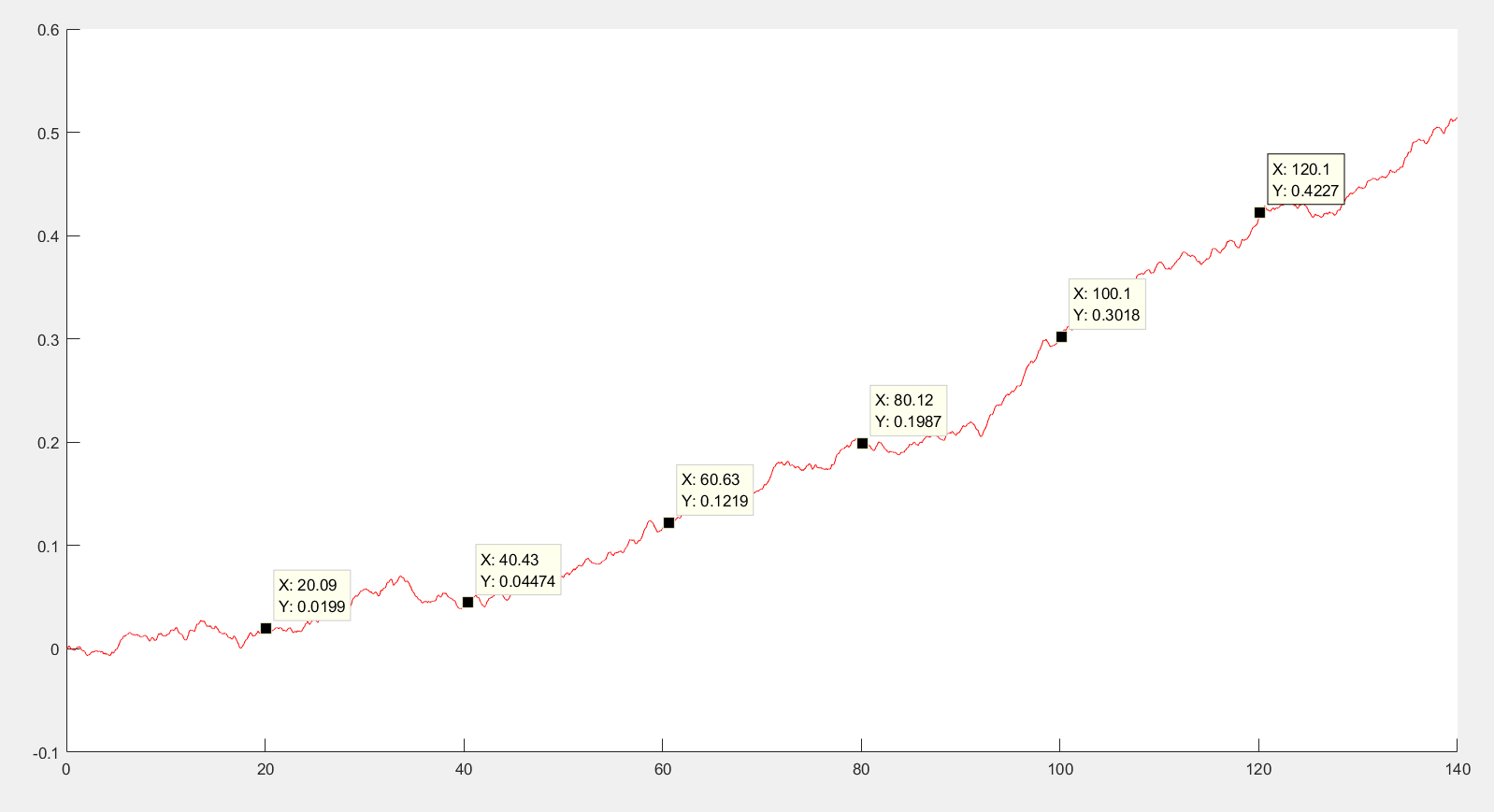
可以从图中看到经历了不同时间后,计算所得角度的偏移结果
| 时间/s | 0 | 20 | 40 | 60 | 80 | 100 | 120 |
|---|---|---|---|---|---|---|---|
| 角度/° | 0 | 0.02 | 0.045 | 0.12 | 0.198 | 0.3 | 0.42 |
我们与不进行滤波直接积分计算的角度进行对比
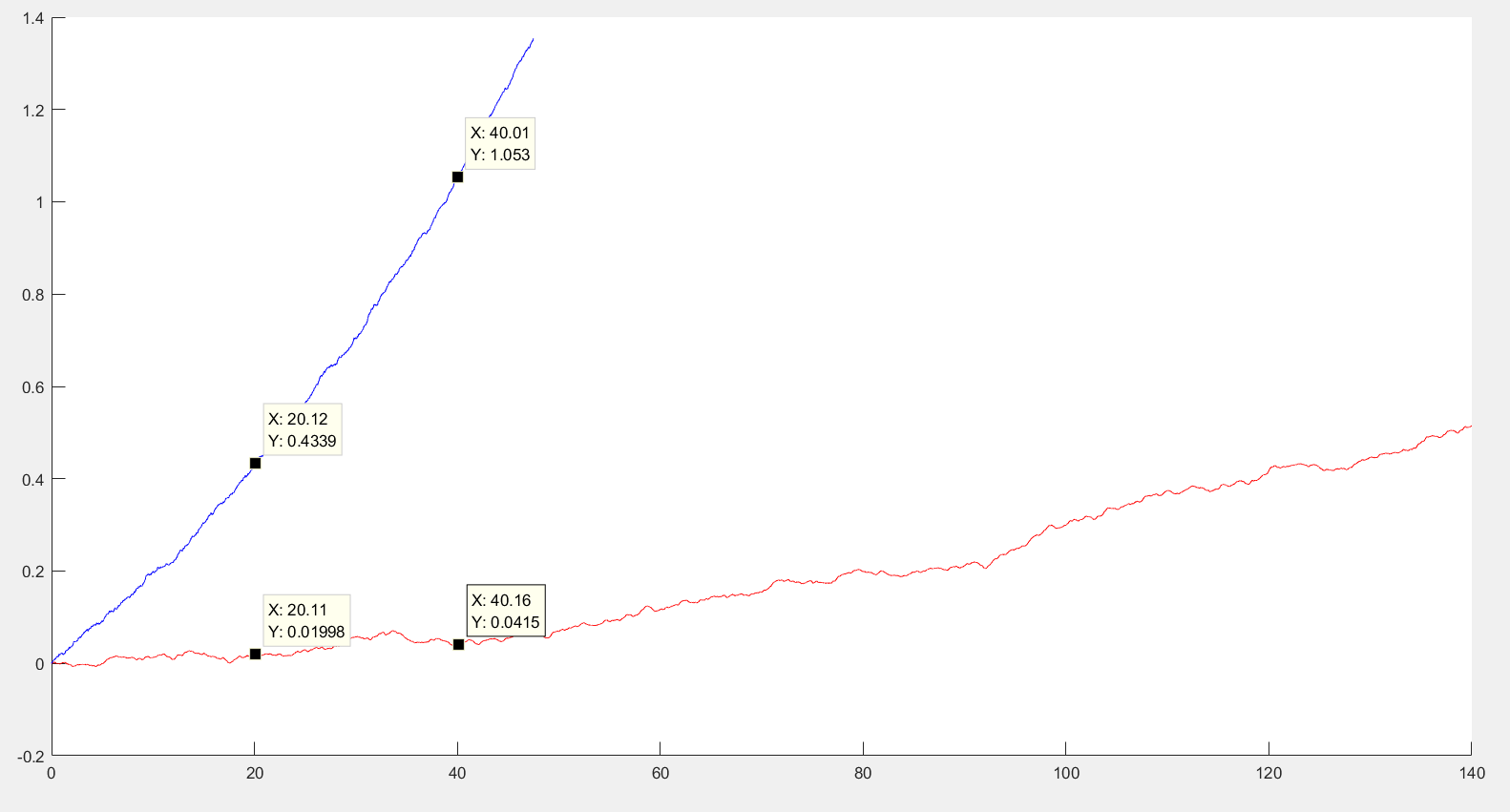
从图中可知,如果不进行滤波在20s后就会偏移0.44°,40s后就会偏移1.05°
也印证了滤波算法的必要性和重要性
动态角速度积分角度计算
我们测试,当转动陀螺仪到达固定角度时,计算所得角度与测试平台上的角度的拟合情况
- 数据源1:陀螺仪计算返回角度
- 数据源2:测试平台上指针角度刻度
测试从0°->5°->10°->30°->60°->90°->30°->0°
以上动作在1min内完成
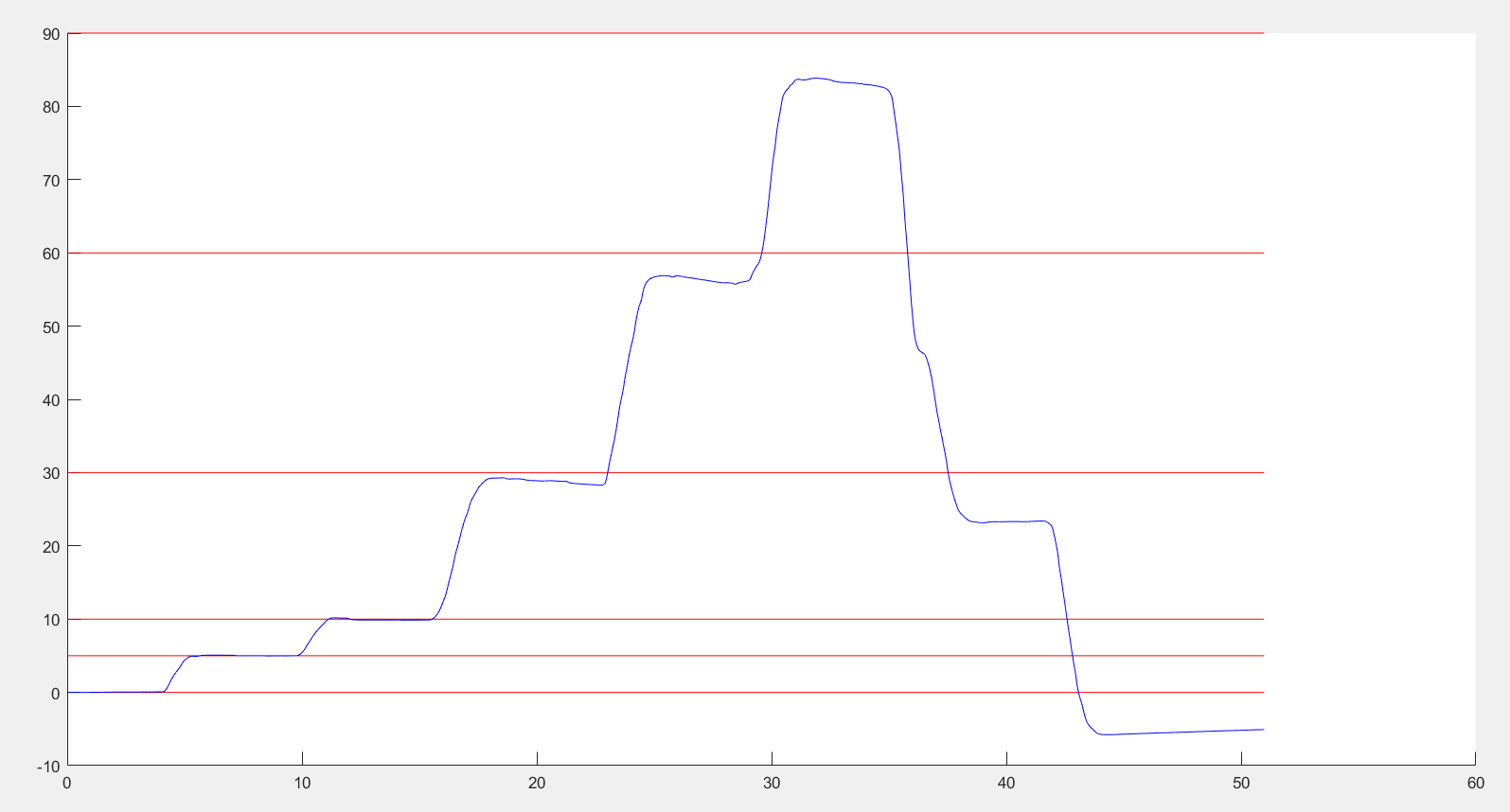
可以看到在小角度转动5°,10°,30°时拟合状况较好,当转动幅度较大时便会实际角度存在较大差值
最大时会相差5°左右
造成这种现象的原因有以下几种可能
- 运算频率较低,当大角度变化的加速过程中,5ms可能捕捉不到一些变化导致累积误差较大
- 纯信任角速度计的数据,无法对数据校准,累计误差无法消除,详细解释见从陀螺仪获知角度
- 滤波算法还可以再优化
- 单次实验有偶然误差

若有收获,就点个赞吧
0 人点赞
