综述
- 空间位姿:设备在空间中的位置及其当前姿态
- 导航坐标系:设备在空间的绝对位置,绝对坐标
- 载体坐标系:在设备发生运动时,以设备自身为原点建立的相对坐标系
- 重点研究两个坐标系之间的相互关系
- 在实际情况下,设备可以感知自己在自己的坐标系下的变化,需要通过转换,将其转移至导航坐标系对其定位
平面变换
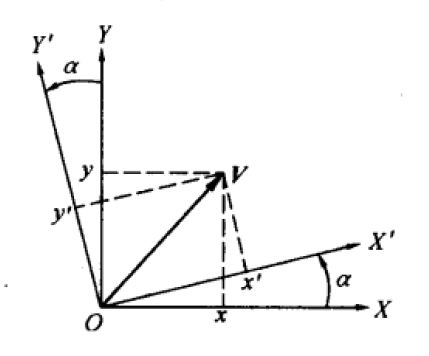
导航坐标系
载体坐标系
同一矢量 ,在两个坐标系的表示中应当一致
,在两个坐标系的表示中应当一致
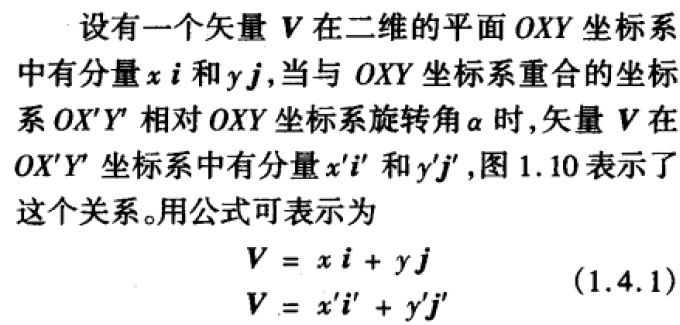
存在关系
对等式两边同时乘以

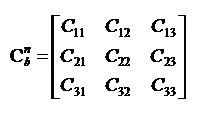
用矩阵表示
即得到方向余弦表(旋转矩阵/姿态矩阵)
即
在全局定位中
- 两个正交编码轮,即为

 即为在地图上的坐标位置
即为在地图上的坐标位置 即为陀螺仪返回的全局定位在水平面上的旋角
即为陀螺仪返回的全局定位在水平面上的旋角
然而全局定位装置中,两个正交轮在初始时就与导航坐标系的坐标轴存在45°夹角,需要对方向余弦表修正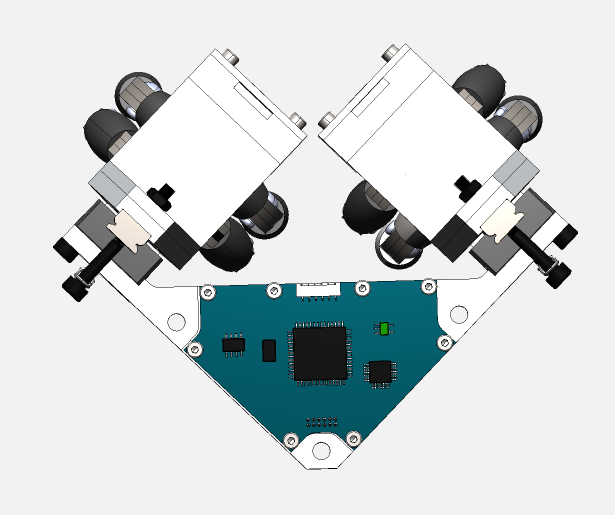

空间变换
空间变换较为复杂,但可以从平面角度理解
可以围绕x,y,z轴,等效为三次平面变换

变换后汇总方程可得结果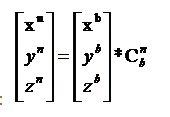
欧拉角变换矩阵



四元数
四元数是简单的超复数
可以把四元数看成一个常数加上一个三维矢量

复数本身就可以看作是一种旋转
使用四元数表示的旋转矩阵

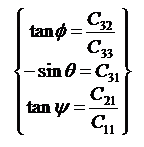
与欧拉角变换阵对应相等,即可求出四元数与欧拉角的换算关系
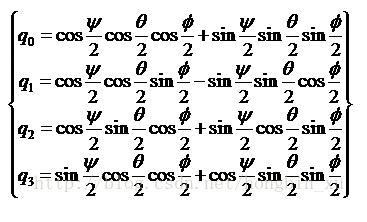
欧拉角->四元数
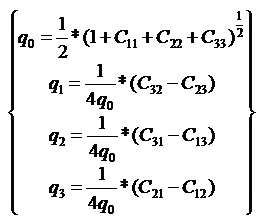
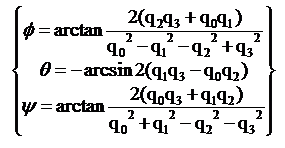
四元数->欧拉角
参考资料
- MP6050获得角度推导
- 惯性导航教材第一章

若有收获,就点个赞吧
0 人点赞
