概述
- 我们常说的“陀螺仪”其实是一类概称,默认是一个能够返回角度的装置或传感器
- 物理陀螺仪是利用陀螺效应,高速旋转的陀螺具有维持轴方向一定的作用,因此具有固定的指向性,通过角度偏差,即可得知当前平台的航向角与陀螺仪指向的角度偏差,因此可以起到测量航向角的作用
- “陀螺仪”的电传感器是指由,加速度计(惯性器件MEMS),速度计(陀螺仪),磁力计三者结合的电子器件
- 本文以MPU6050举例,MPU6050中仅有速度计(惯性器件MEMS),速度计(陀螺仪),没有磁力计
组成
加速度计
加速度计(惯性器件MEMS)
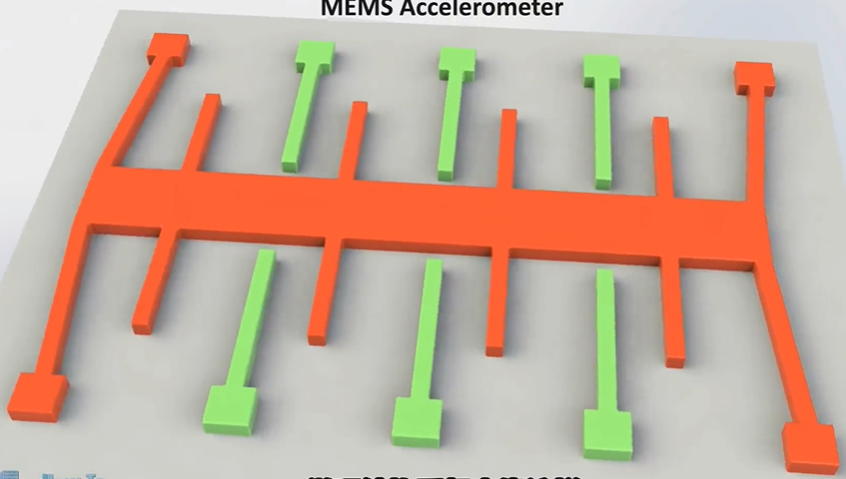
通过内电容片在加速度的影响下形变,改变极板间距,从而改变电容大小,测得对应加速度大小
这里的加速度可以等效为力,即静止状态下,加速度计同样会收到重力大小
因此器件返回的数据是以g(重力加速度)为单位的
三轴加速度,即指在X,Y,Z三个轴上均有一个加速度计,可以感知其轴向加速度的大小,如图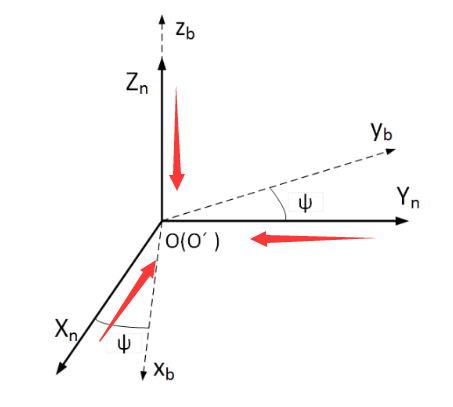
箭头指向为,轴上加速度计感知加速度的正方向
例如将芯片平置在一水平面上时,X轴和Y轴的加速度计值应当为0g,Z轴应当为1g
速度计
速度计即对应真正意义上的陀螺仪
测量利用科里奥利效应反馈的角速度
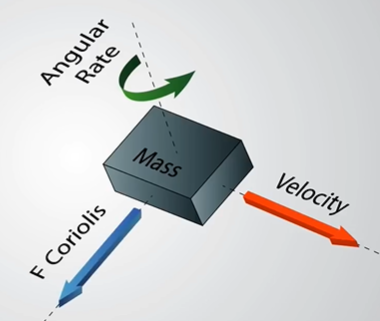
科里奥利效应:当一个物体以恒定速度Velocity向固定方向运动时,外界施以Angular Rate的自旋速度,此时物体会受到F Coriolis力,即地球的地转偏向力原理(高中地理)
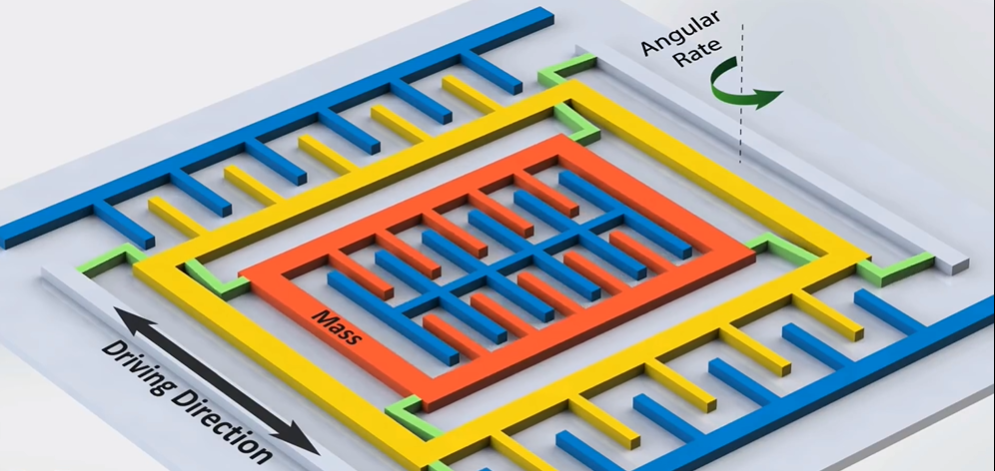
器件内部同样依靠测量极间电容完成对速度计的测量
在器件内对Mass极板施以一定频率的横向振动DrivingDirection,即提供一个固定方向的运动
当收到一个AngularRate的角速度时,Mass极板会向与震动方向垂直的方向偏移
通过测量电容大小即可得知偏移量大小,即可得知角速度大小
三轴角速度,即指在X,Y,Z三个轴上均有一个角速度计,可以感知其轴旋转速度的大小,即
X对应俯仰角,Y轴对应横滚角,Z轴对应航向角
速度的正方向满足右手定则
磁力计
MPU6050没有此测量模块
磁力计利用霍尔效应(磁阻效应)感受所处磁场大小
三轴磁力计,即指在X,Y,Z三个轴上均有一个磁场测量的霍尔元件,可以感知其轴指向收到磁场的大小
视频资料
https://www.bilibili.com/video/BV1Cb411Y73a?from=search&seid=8147237254580391833

若有收获,就点个赞吧
0 人点赞
