测试环境
- Webots2020a
-
测试使用关键模块
motor底盘运动轮电机驱动
- DistanceSensor测距模块
-
测试任务
[x] 激光辅助测角测试
- 激光辅助定位测试
激光辅助测角测试
实验装置
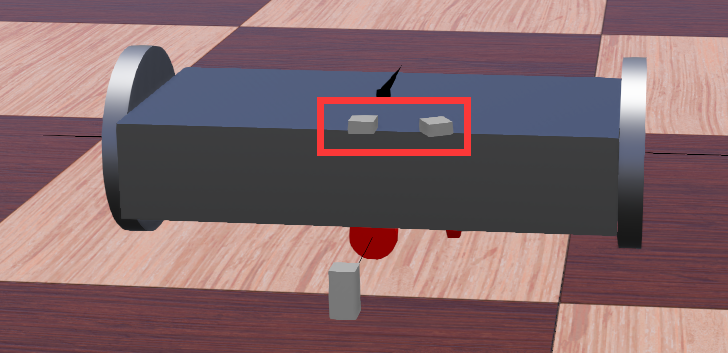
- 红色框圈住部分为激光测距模块
激光测距模块符合实际情况不直接安装在中心位置上,计算距离时需要加上偏移量
算法依据
【全局定位】-【方案资料】-【激光辅助定位】
- 相比原方案修改了激光测距模块的安装位置,但计算原理一致
- 可遵循原步骤推导可得

代码实现
float Length = sqrt(Distance_2*Distance_2+Distance_3*Distance_3-2*Distance_2*Distance_3*cos(OFFSET_ANGLE));float degree = acos((Length*Length+Distance_3*Distance_3-Distance_2*Distance_2)/(2*Length*Distance_3)) - PI/2.0;
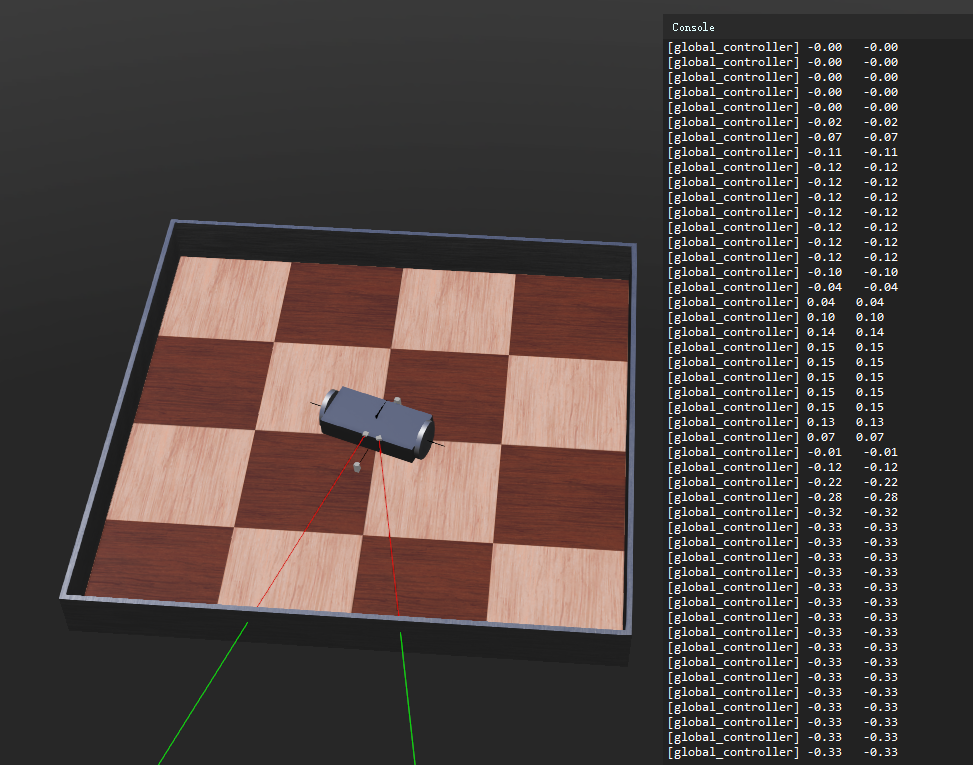
计算效果
为了验证计算结果正确与否
- 与安装的陀螺仪数据对比
- 若两组数据一致则算法成立,依靠激光测角方案可行
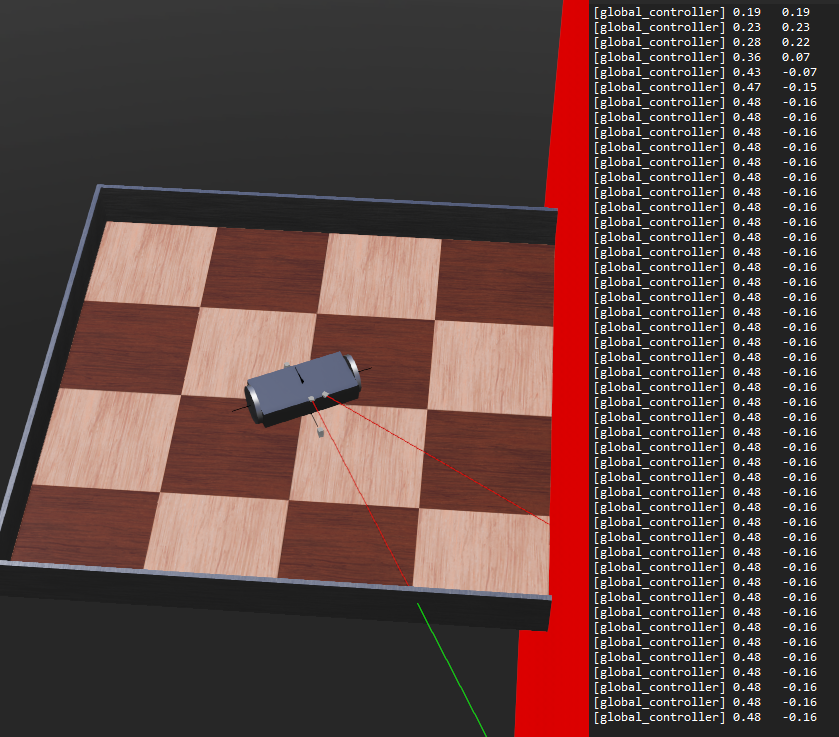
- 因此当想要使用激光矫正机器人角度时,对机器人的位置有一定要求

若有收获,就点个赞吧
0 人点赞
