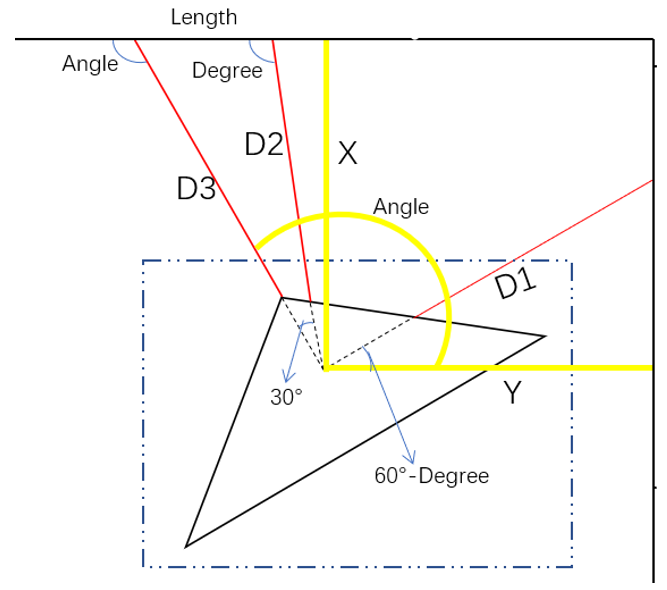
概述基本思路计算方法注意 概述 为全局定位添加校准功能在关键位置校准机器人位姿,修正全局定位数据防止难以避免的累计误差带来影响 基本思路利用激光测距在二维平面内定位机器人以及此时的自旋角,补充反馈机器人姿态信息。 计算方法 如图将激光固定于小车底盘边缘需保证三条激光直线反向会交于底盘一点同时测出中心点分别与三个激光发射器之间的距离bia1,bia2,bia3分别与激光测距所得结果求和,测得distant1,distant2,distant3 解三角函数公式 如图当前机器人位置取第三象限 得出了小车边缘距墙壁的距离,以及自己的自旋角度 注意利用math.h文件求三角函数时,三角函数后面的数值应为弧度制 添加角度与弧度的换算的宏定义:角度 = 弧度*180/3.1415926