矩阵?一排向量,一堆数
介绍完了向量,这一篇我们开始介绍矩阵。对于矩阵而言,最直观的描述就是一个 m×n 大小的数字方阵,它可以看作是 n 个 m 维列向量从左到右并排摆放,也可以看成是 m 个 n 维行向量从上到下进行叠放。
我们举一个实际的例子:一个 2×3的矩阵:
显而易见,它有 2 行 3 列,一共 6 个元素,每一个元素都对应矩阵中的一个数据项,例如第一行第二列的项是 2,我们也可以表示为 A12=7。
现在我们使用Python 语言里的NumPy 库中的嵌套数组来完成,这个矩阵本质上被表示成了一个二维数组。
import numpy as npA = np.array([[3, 7, 6],[0.3, -10, 22]])print(A)print(A.shape)
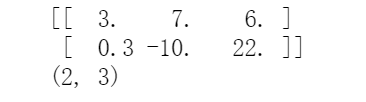
在形容矩阵规模的时候,一般采用其行数和列数来进行描述,对应到代码中,我们通过矩阵 A 的shape 属性,就获取了一个表示规模的元组:2 行 3 列。
一些重要的特殊矩阵
初步接触了上一小节里那个普普通通的 2×3矩阵后,这里我们再补充一些特殊形态的矩阵,这些矩阵的特殊性不光体现在外观形状上,更在后续的矩阵实际应用中发挥着重要的作用。
方阵:行数等于列数
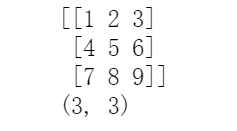
行数和列数相等的这类矩阵,我们称之为方阵,其行数或列数称之为它的阶数,这里我们看到的就是一个 3 阶方阵:
我们用代码表示:
A = np.array([[1, 2, 3],[4, 5, 6],[7, 8, 9]])print(A)print(A.shape)
矩阵转置与对称矩阵
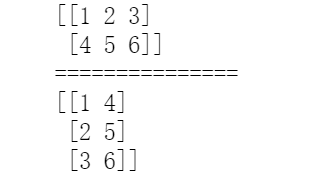
在说到对称矩阵之前,我们先得说一下矩阵的转置。对于矩阵 ,如果将其行列互换得到一个新矩阵
,如果将其行列互换得到一个新矩阵 ,我们将其称之为转置矩阵
,我们将其称之为转置矩阵 ,行列互换的矩阵操作我们称之为矩阵的转置。
,行列互换的矩阵操作我们称之为矩阵的转置。
A = np.array([[1, 2, 3],[4, 5, 6]])print(A)print("===============")print(A.T)
那么,如果原矩阵和转置后新得到的矩阵相等,那么这个矩阵我们就称其为对称矩阵。显然,矩阵对称的前提必须得是一个方阵,其次在方阵 S 中的每一项元素,都必须满足Sij=Sji,我们举一个实际例子看看。
S = np.array([[1, 2, 3],[2, 5, 6],[3, 6, 9]])print(S)print("===============")print(S.T)

在对阵矩阵中我们发现,沿着从左上到右下的对角线相互对称的元素都是彼此相等的。在后面的内容中你会不断发现:将对称矩阵称之为最重要的矩阵之一,丝毫不为过。它在矩阵的相关分析中会扮演极其重要的角色。
向量:特殊的一维矩阵
前面在介绍向量的时候,我们提到过这个概念。现在介绍了矩阵之后,我们再着重回顾一下:n 维的行向量可以看做是 1×n的矩阵,同理,n 维的列向量也同样可以看做是 n×1的特殊矩阵。
那么这样做的目的是什么呢?一方面可以将矩阵和向量的 Python 表示方法统一起来,另一方面,在马上要介绍的矩阵与向量的乘法运算中,也可以将其看作是矩阵与矩阵乘法的一种特殊形式,将计算方式统一起来。我们再次用这个视角重新生成一个新的行向量和列向量。
p = np.array([[2, 5, 8]])print(p)print("===============")print(p.T)
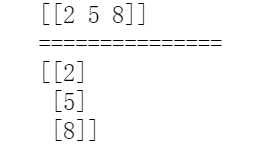
我们用生成矩阵的方法生成了一个 1×3的矩阵,用它来表示一个 3 维的行向量。随后将其转置(因为是矩阵形式,所以可以运用转置方法),就得到了 3 维的列向量。
零矩阵:元素全 0
顾名思义,所有元素都是 0 的矩阵称之为零矩阵,记作 O,像下面这个 3×5的零矩阵。 ,它可以记作是 O3,5
,它可以记作是 O3,5
我们来看看如何用代码操作。
A = np.zeros([3, 5])print(A)
对角矩阵
非对角元素位置上全部为 0 的方阵,我们称之为对角矩阵,例如:
用Python 生成的方法如下:
A = np.diag([3, 5, 7])print(A)
单位矩阵:对角线为 1
注意:单位矩阵并不是所有元素都为 1 的矩阵,而是对角元素均为 1,其余元素均为 0 的特殊对角矩阵。n 阶单位矩阵记作 ,下面我们用 Python 生成一个 4 阶单位矩阵
,下面我们用 Python 生成一个 4 阶单位矩阵

I = np.eye(4)print(I)
矩阵的基本运算
矩阵的加法
矩阵之间的加法必须运用到相等规模的两个矩阵之间,即:行数和列数相等的两个矩阵之间才能做加法运算。这个非常容易理解,将对应位置上的元素相加即可得到结果矩阵:
我们还是看看实际的代码。
A = np.array([[1, 2, 3],[4, 5, 6]])B = np.array([[10, 20, 30],[40, 50, 60]])print(A+B)
矩阵的数量乘法
矩阵的数量乘法,描述起来也非常简单:
我们还是看看实际的代码的例子。
A = np.array([[1, 2, 3],[4, 5, 6]])print(3*A)
矩阵与矩阵的乘法
矩阵与矩阵的相乘,过程要稍微复杂一点,因此我们拿出来单讲。例如下面举例的矩阵 A 和矩阵 B 的乘法运算,对两个矩阵的形态是有要求的。
仔细观察这个计算公式,我们总结出以下的一些要求和规律:
- 左边矩阵的列数要和右边矩阵的行数相等
- 左边矩阵的行数决定了结果矩阵的行数
- 右边矩阵的列数决定了结果矩阵的列数
同样,我们用 Python 来演示下面这个例子:
import numpy as npA = np.array([[1, 2],[3, 4],[5, 6]])B = np.array([[3, 4, 5],[6, 7, 8]])print(np.dot(A, B))
改变空间位置:矩阵乘以向量的本质
矩阵与向量的乘法,一般而言写作矩阵 A 在左,列向量 x 在右的 Ax 的形式。这种 Ax 的写法便于描述向量 x 的位置在矩阵 A 的作用下进行变换的过程(下面会详细介绍)。
矩阵与向量的乘法,其实可以看作是矩阵与矩阵乘法的一种特殊形式,只不过位于后面的矩阵列数为 1 而已。
我们对照前面讲过的矩阵与矩阵的乘法,来对比一下矩阵与向量的乘法规则,我们把列向量看作是列数为 1 的特殊矩阵,那么就会非常明确:
- 矩阵在左,列向量在右,矩阵的列数和列向量的维数必须相等
- 矩阵和向量相乘的结果也是一个向量
- 矩阵的行数就是最终结果输出的列向量的维数
- 乘法的规则如上所示,就是矩阵的每行和列向量进行对应元素分别相乘后相加
我们来看一个矩阵与列向量相乘的例子:
A = np.array([[1, 2],[3, 4],[5, 6]])x = np.array([[4, 5]]).Tprint(np.dot(A, x))
从结果看,原始向量表示二维空间中的一个点,坐标为 (4,5),经过矩阵 乘法的作用,转化为三维空间中坐标为 (14,32,50) 的点。
乘法的作用,转化为三维空间中坐标为 (14,32,50) 的点。
因此从这个例子中我们可以总结一下矩阵的作用:在特定矩阵的乘法作用下,原空间中的向量坐标,被映射到了目标空间中的新坐标,向量的空间位置(甚至是所在空间维数)由此发生了转化。
从行的角度思考
学习了矩阵、向量的表示方法以及运算规则之后,我们回过头来静静的思考一个问题:矩阵 A 和列向量 x 的乘法 Ax 到底意味着什么?下面,我们就来挖掘一下这里面的内涵。
在二阶方阵 A 与二维列向量 x 相乘的例子中:
刚才说了,位于矩阵 A 第 i 行的行向量的各成分和列向量 x 各成分分别相乘后相加,得到的就是结果向量的第 i 个成分。这个计算方法有没有感觉很熟悉?没错,这不就是向量点乘的定义式么?
即:
矩阵与向量的乘法如果从行的角度来看,就是如此。常规的计算操作就是这么执行的,但是似乎也没有更多可以挖掘的,那我们试试继续从列的角度再来看看。
列的角度:重新组合矩阵的列向量
如果从列的角度来计算矩阵与向量的乘积,会有另一套计算的方法,可能大家对这种方法要相对陌生一些。但是实质上,这种方法从线性代数的角度来看,还要更为重要一些,我们还是用二阶方阵进行举例。
发现了规律没有?我们通过这种形式的拆解,也能得到最终的正确结果,这就是从列的角度进行的分析。从前面的知识我们可以这样描述:从列的角度来看,矩阵 A 与向量 x 的乘法是对矩阵 A 的各列向量进行线性组合的过程,每个列向量的组合系数就是向量 x 的各对应成分。
这么理解似乎有点新意,我们按照列的思想重新把矩阵 A 写成一组列向量的形式:
所得到的结果就是矩阵第一列的列向量 的3倍,
的3倍, 的5倍。因此,一个矩阵和一个向量相乘的过程,就是对位于原矩阵各列的列向量重新进行线性组合的过程,而线性组合的各系数就是向量的对应各成分。
的5倍。因此,一个矩阵和一个向量相乘的过程,就是对位于原矩阵各列的列向量重新进行线性组合的过程,而线性组合的各系数就是向量的对应各成分。
进一步引申:变换向量的基底
二阶方阵与二维列向量乘法举例
为了方便说明原理,我们依旧用二阶方阵 与列向量
与列向量 举相乘例。
举相乘例。
二维列向量 的坐标是(x,y)。还记得之前我们介绍过的向量坐标的概念么?向量的坐标依托于基底的选取,向量坐标在基底明确的前提下才有实际意义,而这个二维列向量,我们说它的坐标是(x,y),基于的就是默认基底
的坐标是(x,y)。还记得之前我们介绍过的向量坐标的概念么?向量的坐标依托于基底的选取,向量坐标在基底明确的前提下才有实际意义,而这个二维列向量,我们说它的坐标是(x,y),基于的就是默认基底 那么二维列向量的完整表达式就是:
那么二维列向量的完整表达式就是: 。
。
好,回顾了这些基础,我们就利用它将矩阵与向量的乘法表达式做进一步的展开:
是不是已经初见端倪了?我们再直观地展示一下式子首尾的结果,在矩阵 的乘法作用下,向量完成了下面的转换:
的乘法作用下,向量完成了下面的转换: 相当于把原坐标(x,y)变换为以新的基底
相当于把原坐标(x,y)变换为以新的基底 为参考系的新坐标(ax+by,cx+dy)。让我们通过下面两幅图,来看看这个过程是如何完成空间转换的。
为参考系的新坐标(ax+by,cx+dy)。让我们通过下面两幅图,来看看这个过程是如何完成空间转换的。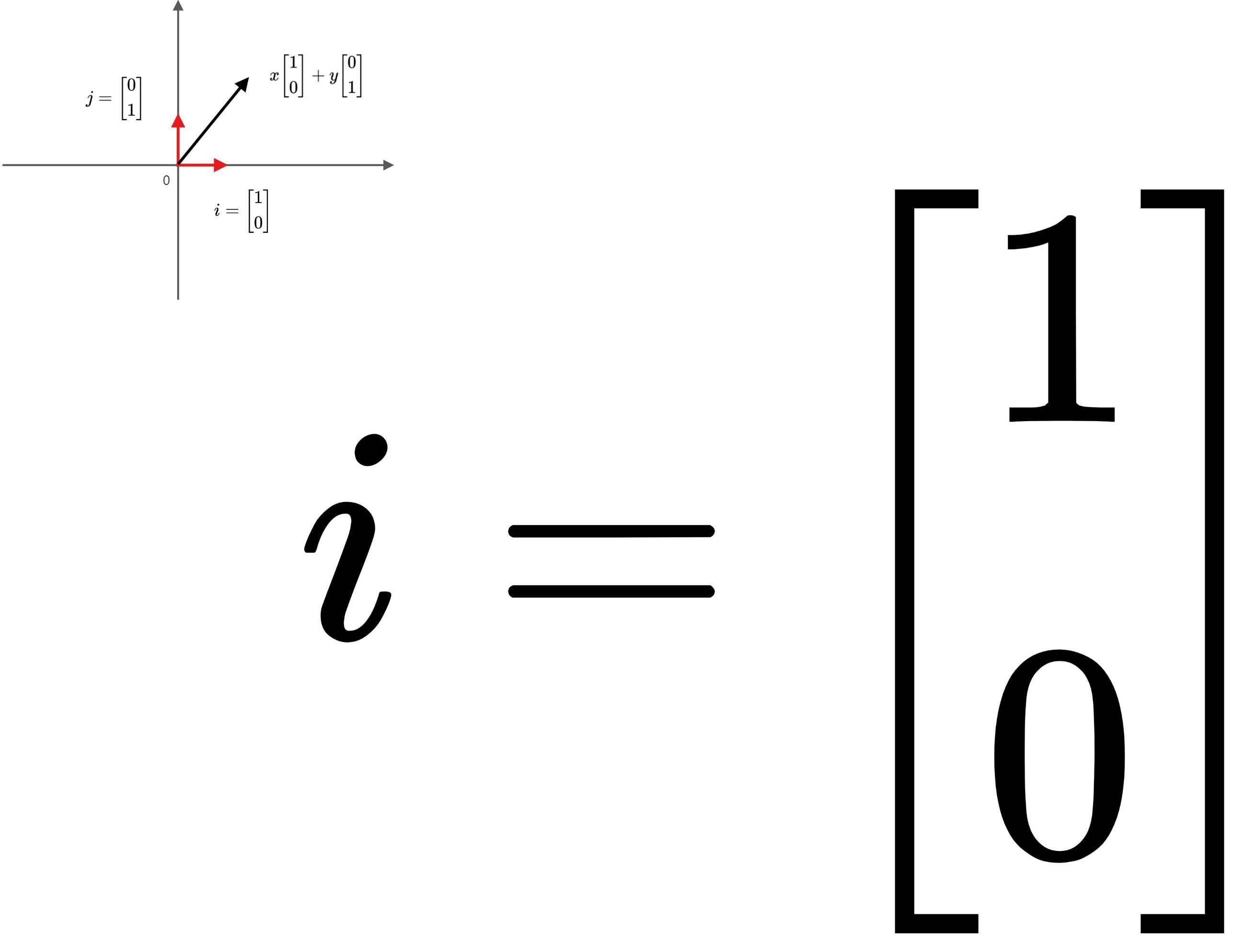
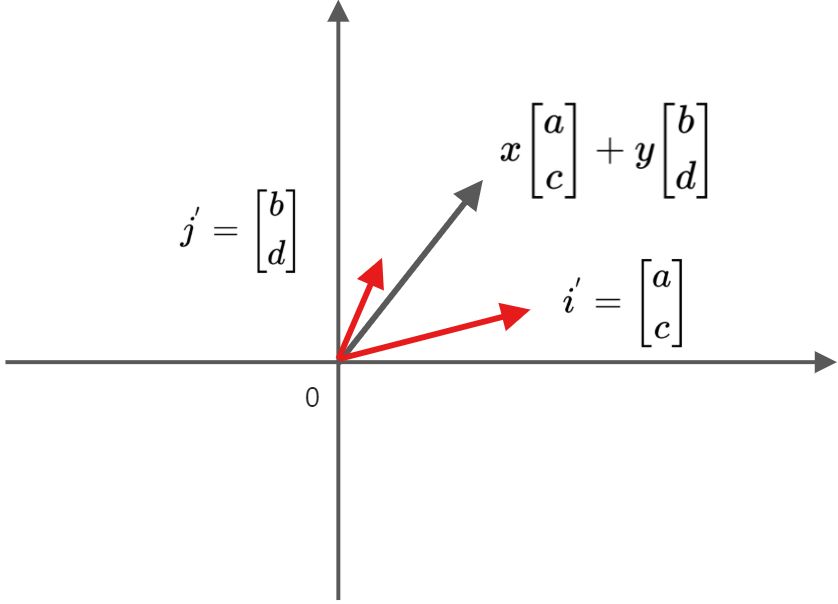
结合矩阵的式子我们不难发现:矩阵 A 的第一列 就是原始的默认基向量
就是原始的默认基向量 变换后的目标位置(新的基向量),而第二列
变换后的目标位置(新的基向量),而第二列 就是另一个基向量
就是另一个基向量 映射后的目标位置(新的基向量)。基底的变换明确了,那向量的坐标呢?映射后得到的新向量,如果以
映射后的目标位置(新的基向量)。基底的变换明确了,那向量的坐标呢?映射后得到的新向量,如果以 为基底,它的坐标仍是 (x,y) ,如果以默认的
为基底,它的坐标仍是 (x,y) ,如果以默认的 为基底,那么其坐标就是 (ax +by,cx+dy)。
为基底,那么其坐标就是 (ax +by,cx+dy)。
扩展到三阶方阵
为了让结果更让人信服,我们再看看三阶方阵和三维列向量相乘的例子,同理也满足这个过程:
是不是和二阶矩阵的情况是一模一样呢?三阶方阵将三维列向量的基底做了映射转换,方阵的第一列 是原始基向量
是原始基向量 映射后的目标位置(新的基向量),方阵的第二列
映射后的目标位置(新的基向量),方阵的第二列 是原始基向量
是原始基向量 映射后的目标位置(新的基向量),方阵的第三列
映射后的目标位置(新的基向量),方阵的第三列 是原始基向量
是原始基向量 映射后的目标位置(新的基向量)。
映射后的目标位置(新的基向量)。
因此同样的,映射后的目标向量如果在新的基底 坐标值由原来默认基底下的坐标(x,y,z)变换为(ax+by+cz, dx+ey+fz, gx+hy+iz)。
坐标值由原来默认基底下的坐标(x,y,z)变换为(ax+by+cz, dx+ey+fz, gx+hy+iz)。
一般化的:m×n 矩阵乘以 n 维列向量
此处,我们看到的就是最一般的情况了,矩阵 A= 和向量
和向量 进行相乘。
进行相乘。
在 m×n 矩阵 A 的作用下,原始的 n 维基向量  映射成了新的基向量:
映射成了新的基向量: ,n 维基向量
,n 维基向量
映射成了 ,我们发现,在这种一般性的情况下,如果
,我们发现,在这种一般性的情况下,如果 (m为行数,n为列数)那么映射前后,基向量的维数甚至都可能发生变化,n 维列向量 x 变换成了 n 个 m 维列向量线性组合的形式,其最终结果是一个 m 维的列向量。
(m为行数,n为列数)那么映射前后,基向量的维数甚至都可能发生变化,n 维列向量 x 变换成了 n 个 m 维列向量线性组合的形式,其最终结果是一个 m 维的列向量。
由此看出,映射后的向量维数和原始向量维数的关系取决于 m 和 n 的关系,如果 m>n,那么目标向量的维数就大于原始向量的维数,如果 m
基变换的意外情况
实质上,如果仅仅停留在上面的讨论结果,那可能会显示出我们思考问题不够全面、准确。首先,“经过矩阵变换,会将原始的基底变换成为一组新的基底”这句话的表述就并不准确,之前这么说只是为了方便大家理解并建立概念。
为什么这么说呢?对于一个 m×n (m行n列)的矩阵 A 和 n 维列向量 x,经过 Ax 的乘法作用,x 的 n 个 n 维默认基向量构成的基底被转换成了 n 个 m 维的目标向量。
- 当 n>m 的时候,这 n 个向量线性相关,因此不构成基底;
- 当 n<m 的时候,即使这 n 个向量线性无关,由于它们不能表示 m 维空间中的所有向量,因此也不能称之为基底;
- 当且仅当 n=m,且这 n 个向量线性无关的时候,它们才能称之为一组新的基底。
不过即便有这些意外情况,我们这一讲里讨论的内容仍然具有重要意义,矩阵 A 的各列向量是 x 默认基底经过转换后的目标向量,正因为其在维度和线性相关性方面存在各种不同情况,因此这组目标向量的张成空间和原始向量所在的空间之间,就会存在多种不同的对应关系,这便是我们后续将要重点讨论的空间映射相关内容。

若有收获,就点个赞吧
0 人点赞
