一、引言
Lin是一种一主多从的单总线协议。
背景历史这些都可以在文末参考链接中查阅。
Lin和Can都是车上常用的总线,所以做个对比,这个网上对比文章很多。
Lin和Uart其实从硬件时序图来看,很多相似处,甚至可以用串口来模拟Lin,所以这部分也做了一个对比。
英文解释如下:
LIN:Local Interconnect Network
Can: 控制器局域网 - Controller Area Network
Uart:通用异步收发传输器 - Universal Asynchronous Receiver/Transmitter
Usart:通用同步/异步串行接收/发送器 - Universal Synchronous/Asynchronous Receiver/Transmitter
SCI:串行通信接口 - Serial Communication Interface,Lin、Uart都属于SCI
二、Lin总线
(一)时序
Lin时序图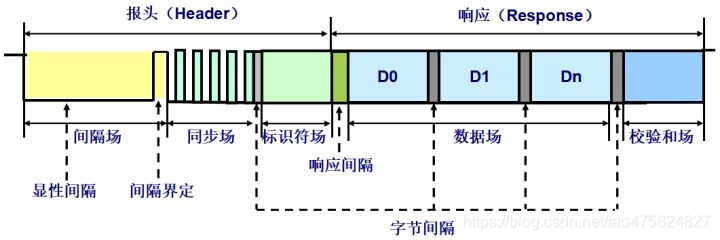
时序的完整说明看这里
从上面链接转了一些十分直观的图过来,看完这几张图基本就看完了Lin时序,十分详细,精确搭配到每一位。
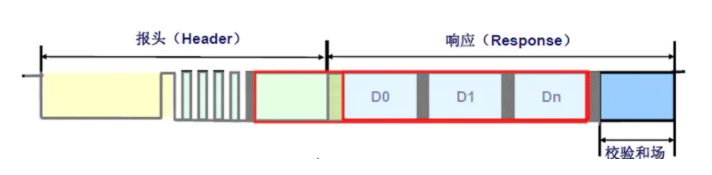
一帧数据 = 报头 + 响应
报头 = 间隔场 + 同步场 + 标志符场
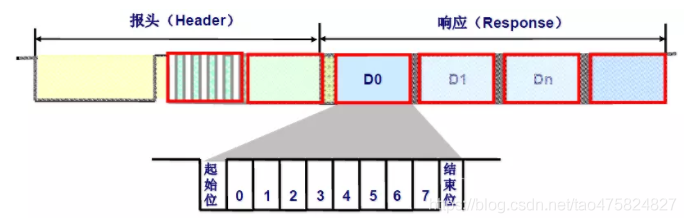
响应 = 数据场 + 校验和场
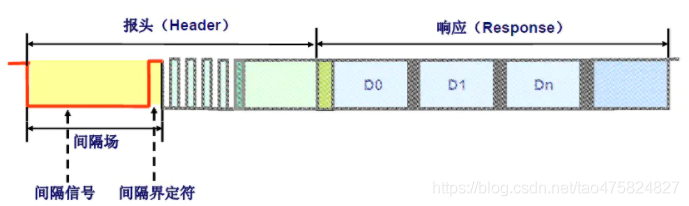
- 间隔场
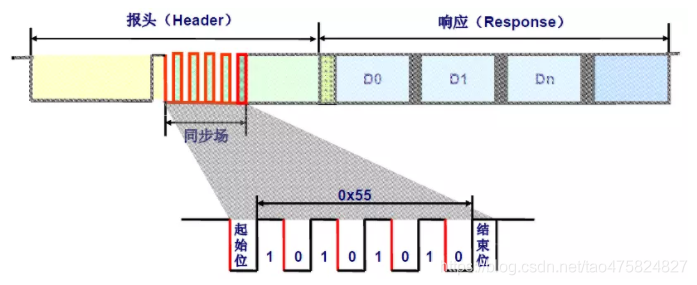
- 同步场
注意这里发送0x55实际是10101010,和串口发送顺序一致。
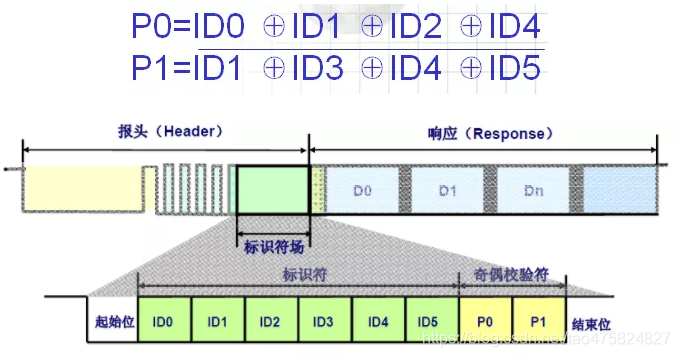
- 标识符场
- 数据场
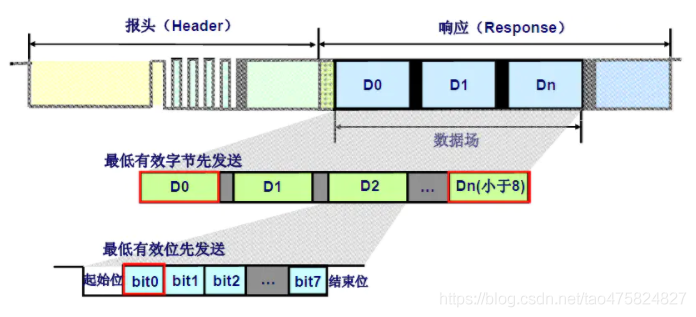
- 字节场
- 校验和场
/******************************************************************Lin总线帧格式:帧头+应答帧头:同步间隔段(至少13个显性电平)+同步间隔段间隔符(至少1位隐形电平)+同步段(0x55)+字节间间隔+PID(ID+校验位)注:PID=ID(6位)+校验(2位)ID 取值范围为: 0x00~0x3fID的取值分类:信号携带帧 : 0x00~0x3b诊断帧(主机请求):0x3c诊断帧(从机应答):0x3d保留帧 : 0x3e,0x3fP0 = ID0⊕ID1⊕ID2⊕ID4 异或运算P1 = ID1⊕ID3⊕ID4⊕ID5 异或后取非应答:应答间隔+数据段+校验和段数据段 低字节的低位先发标准型校验和:只校验数据段增强型校验和:校验数据段以及PID诊断帧只能用标准型校验和******************************************************************/
(二)总线
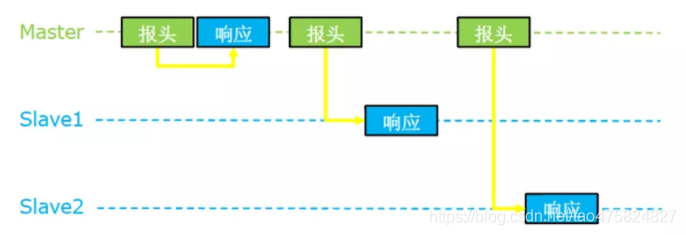
Lin总线是一主多从的结构吗,LIN网络的节点数量不应超过16个。三、与Can总线对比
Lin与Can的对比网上文章很多,这里就简单写一下。
- Can可以是多主机,都可以主动发消息,can控制器会进行仲裁。
Lin是一主多从,查询回复 - 二者物理层电平协议不同,Can是2.5V上下1V,Lin是12V。
所以LIN收发器用的是TJA1020
CAN收发器用的是TJA1050 - Can速度高,Lin是低速总线。
Can通常为500kb/s,最低的也达到100kb/s。
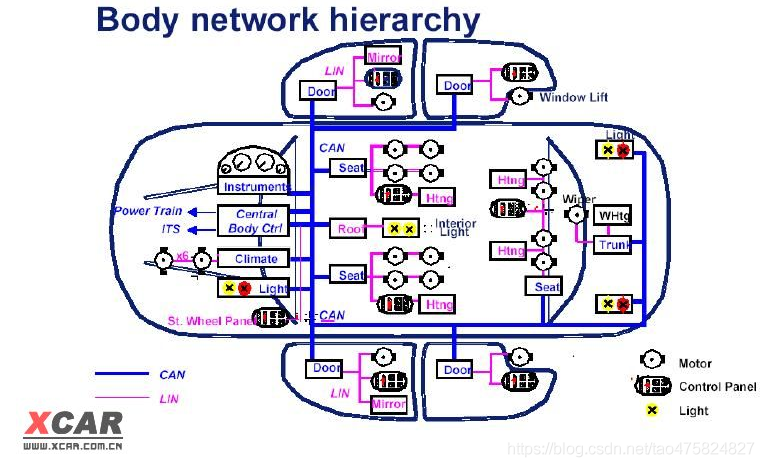
Lin传输速率最高可达20Kbps,通常使用19200b/s或9600b/s的速率。 - 车载应用场景不同,Lin主要用于车顶、信号灯控制、汽车顶篷、车门、车窗玻璃、方向盘
方向控制开关、空调、座椅等等这些低速,校验不强的场景。
四、与Uart对比
Lin和Uart在协议上不同,在硬件是很像的,或者说一样的,都是串行通用异步收发器。
因此有些IC没有Lin的情况下都是使用Uart来模拟Lin。
一般情况下,二者是不能直接模拟的,因为,因为Lin的字节场 和 Uart一样都是8N1的格式,但是Lin的头部场不符合这块。帧间隔场是连续13个显性电平,与串口的8位不符,所以帧间隔这部分就比较难搞。
(一)波形对比
1、Lin波形
具体时序图可以看2.1节
帧头:同步间隔段(至少13个显性电平)+同步间隔段间隔符(至少1位隐形电平)+同步段(0x55)+字节间间隔+PID(ID+校验位)
应答:应答间隔+数据段+校验和段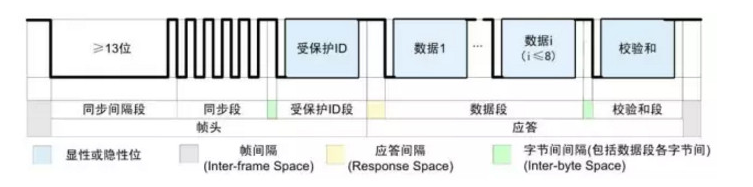
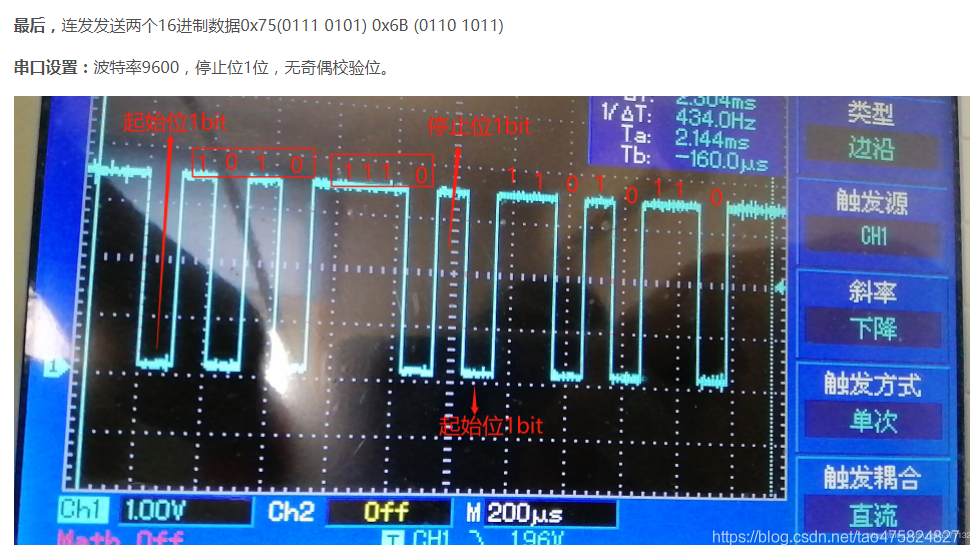
2、串口波形
串口波形如下:
以1字节(8位)为一帧,
1bit 起始位 + 8位 数据位 + 1位校验位(或者没有) + 1位 停止位
 (二)Uart模拟Lin
(二)Uart模拟Lin
看了一下stm32的cubeMx,uart确实可以选做Lin功能,说明在没有专用的Lin控制器的情况下,利用一些特别的做法,是可以通过Uart来实现lin的接收发送的。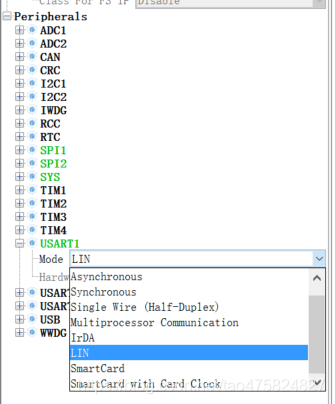
借用一份网上看到的说法:
用普通串口是怎么实现LIN Break的低电平长度的?发一个字节的0x00总共才8bit不够长,两个字节0x00又太长而且中间断开了不连续;就算切换低波特率来发送0x00,但是切换波特率比较耗时,高电平长度明显超过协议要求,不符合LIN协议要求。 因此普通串口作为LIN从模式还行,作为主模式完全不符合LIN的标准。作为主模式就必须使用增强型串口才能解决 LIN Break问题。 然后是软件问题,由于LIN总线是半双工通信的,通信效率低而且没有硬件过滤器,必然会对MCU的性能产生极大的影响。这种情况下采用RTOS必然是可选项,否则容易导致事件响应实时性问题。
从网上下到了一份stm32的uart模拟lin的代码,比较有参考意义,简单介绍如下:
这个是我的一个车机项目中正在使用的LIN代码.MCU是STM32F103使用的是UCOS-II系统.这段代码包括LIN的从模式的初始化、接收、回应等。利用的是串口的LIN模式中断。带有很多中文注释。希望对你有用。 (This is the use of a car engine project my code in LIN.MCU is the use of the STM32F103 is UCOS-II system. This code includes LIN from model initialization, receiving, response. Use of the interrupt serial port LIN mode. With a lot of Chinese notes. I hope useful to you.)
头文件
/********************************************************************************************* DVG001项目LIN总线分析头文件* 文件名称: LIN.h* 版本号 : V0.9* 编写人 : Rock.Wu* 编写日期:2012-03-30********************************************************************************************/#ifndef __LIN_H#define __LIN_H/*******************************包含的文件******************************/#include <data_dispose.h>/*******************************宏定义************************************/#ifdef LIN_MODULE#define LIN_EXT#else#define LIN_EXT extern#endif#define LIN_MODE 1/*当为1时工作在从模式,当为0时工作在主模式*/#define LIN_CHECKSUM_MODE 1/*0为普通模式只效验数据,1为增强行模式连ID一起效验*/#define LIN_ID_NUM 2/*从模式中需要处理的ID个数*/#define LIN_LEN_MODE 1/*0是直接从ID的Bit5、bIT4位获得,1是按约定从表格中获得*//*接收ID*/#define ID_LIFE_BELT 0xf0#define ID_ACK 0x50/*******************************数据类型定义***************************/enum SlaveWorkMode{SLAVE_IDLE,SLAVE_RX_MODE,SLAVE_TX_MODE};typedef struct{INT8U CMD_ID; /*命令ID*/void (*pFunc)(void); /*对应的命令处理函数*/} CMD_LINType;/*******************************全局变量和事件定义*****************/LIN_EXT OS_EVENT *LINMutex;LIN_EXT OS_EVENT *LINRxSem;LIN_EXT LINDataType LINTempData;#ifdef LIN_MODULE/*这里是标注要处理的ID是接收数据还是要回应数据,还有数据长度*/#if (LIN_LEN_MODE == 0)const INT8U LIN_ID_List[LIN_ID_NUM][2]={{ID_LIFE_BELT, SLAVE_RX_MODE},{ID_ACK, SLAVE_TX_MODE}};#elseconst INT8U LIN_ID_List[LIN_ID_NUM][3]={{ID_LIFE_BELT, SLAVE_RX_MODE, 8},{ID_ACK, SLAVE_TX_MODE, 4}};#endif#endif/*******************************函数声明定义***************************/LIN_EXT void BSP_LIN_Init(void);LIN_EXT void LinSend(INT8U *ComputeData);LIN_EXT void LIN_DataAnalyse(void);#endif/*************************************************************************************************** End Of File*************************************************************************************************/
源文件
/************************************************************************************************ DVG02项目的LIN总线分析文件* 文件名称: LIN.c* 版本号 : V0.9* 编写人 : Rock.Wu* 编写日期:2012-08-20***********************************************************************************************/#define LIN_MODULE/*******************************包含的文件******************************/#include <includes.h>#include <cpu.h>#include <LIN.h>/*******************************宏定义************************************/#define BIT(A,B) ((A>>B)&0x01)#define LIN_RXCMD_BUF_SIZE 5 /*接受缓存大小10个报文*//*******************************数据类型定义***************************//*******************************变量定义*********************************/enum LinState{IDLE,SYNCH,ID_LEN,DATA_GET,CHECKSUM};enum LinErrState{NO_ERR,SYNC_ERR,ID_ERR,CHKSUM_ERR};static INT8U AnalysePlus4 = IDLE;#if (LIN_LEN_MODE == 0)static const INT8U LIN_Len[4]={2, 2, 4, 8};#endifstatic LINDataType TempLinData;LINDataType LINRxMsgBuf[LIN_RXCMD_BUF_SIZE];COMM_LIN_Q LIN_RxMsg;extern CMD_LINType const LIN_CMD[LIN_ID_NUM];static INT8U SendDataLen =0;static INT8U LinSendBuf[9]={0,0,0,0,0,0,0,0,0};/*******************************函数声明*********************************/static void LIN_IRQ_Handler(void);static void LIN_Rx_Analyse(INT8U LIN_Data);/******************************************************************************** 功能描述: 初始化UART4,用于与LIN通讯** 输 入:** 全局变量: UART1Sem** 调用模块:** 编写人 : Rock.Wu** 编写日期:2012-09-14*******************************************************************************/void BSP_LIN_Init(void){USART_InitTypeDef USART_InitStructure;/*串口设置恢复默认参*/GPIO_InitTypeDef GPIO_InitStructure;INT8U i,j;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOC, ENABLE);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;GPIO_Init(GPIOC, &GPIO_InitStructure);GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING;GPIO_Init(GPIOC, &GPIO_InitStructure);RCC_APB1PeriphClockCmd(RCC_APB1Periph_UART4, ENABLE);USART_InitStructure.USART_BaudRate = 19200;USART_InitStructure.USART_WordLength = USART_WordLength_8b;USART_InitStructure.USART_StopBits = USART_StopBits_1;USART_InitStructure.USART_Parity = USART_Parity_No;USART_InitStructure.USART_HardwareFlowControl = USART_HardwareFlowControl_None;USART_InitStructure.USART_Mode = USART_Mode_Rx | USART_Mode_Tx;USART_Init(UART4, &USART_InitStructure);USART_LINBreakDetectLengthConfig(UART4, USART_LINBreakDetectLength_11b);USART_LINCmd(UART4, ENABLE);USART_Cmd(UART4, ENABLE);USART_ITConfig(UART4, USART_IT_RXNE, ENABLE);/*先使能接收中断*/USART_ITConfig(UART4, USART_IT_TXE, DISABLE); /*先禁止发送中断*/USART_ITConfig(UART4, USART_IT_LBD, ENABLE);/*先使能LIN间隔场检测到中断*/BSP_IntVectSet(BSP_INT_ID_UART4, LIN_IRQ_Handler);BSP_IntPrioSet(BSP_INT_ID_UART4, 1);BSP_IntEn(BSP_INT_ID_UART4);TempLinData.ErrorType = NO_ERR;for(i=0;i<LIN_RXCMD_BUF_SIZE;i++) /*初始化接收队列数据*/{LINRxMsgBuf[i].CMD_ID = 0;LINRxMsgBuf[i].Len = 0;for(j=0;j<8;j++)LINRxMsgBuf[i].Data[j]=0;}COMM_LIN_QCreate(&LIN_RxMsg, LINRxMsgBuf, LIN_RXCMD_BUF_SIZE); /*创建队列*/}/**************************************************************************************** 功能描述: UART4 LIN 通讯接收发送中断服务程序** 全局变量:** 调用模块:** 编写人 : Rock.Wu** 编写日期:2012-09-14**************************************************************************************/static void LIN_IRQ_Handler(void){if(USART_GetITStatus(UART4, USART_IT_LBD) != RESET){USART_ClearITPendingBit(UART4, USART_IT_LBD);/*清除LIN间隔场检测标志*/AnalysePlus4 = SYNCH;/*确认检测到间隔场下一个开始接收的是同步场数据*/TempLinData.ErrorType = NO_ERR;TempLinData.WorkMode = SLAVE_IDLE;USART_ITConfig(UART4, USART_IT_TXE, DISABLE); /*先禁止发送中断*/}if(USART_GetITStatus(UART4, USART_IT_RXNE) != RESET){USART_ClearITPendingBit(UART4, USART_IT_RXNE);/*清除接收中断标志*/LIN_Rx_Analyse((INT8U)USART_ReceiveData(UART4));}/*溢出-如果发生溢出需要先读SR,再读DR寄存器则可清除不断入*/if(USART_GetFlagStatus(UART4, USART_FLAG_ORE)==SET){USART_ClearFlag(UART4, USART_FLAG_ORE); /*读SR其实就是清除标志*/USART_ReceiveData(UART4);/*读DR*/}if(USART_GetITStatus(UART4, USART_IT_TXE) != RESET){USART_ClearITPendingBit(UART4, USART_IT_TXE);/*清除接收中断标志*/if((LINTempData.WorkMode == SLAVE_TX_MODE)&&(SendDataLen != 0)){SendDataLen--;/*这个必须防在先面的发送函数前才能得到正确的数据,因为之前它加了1*/USART_SendData(UART4, ((u16) LinSendBuf[SendDataLen]));}else{SendDataLen = 0;LINTempData.WorkMode = SLAVE_IDLE;USART_ITConfig(UART4, USART_IT_TXE, DISABLE); /*先禁止发送中断*/}}}/**************************************************************************************** 功能描述: UART4 LIN 通讯接收解析服务程序** 全局变量:** 调用模块:** 编写人 : Rock.Wu** 编写日期:2012-09-17**************************************************************************************/static void LIN_Rx_Analyse(INT8U LIN_Data){INT8U TempData = 0, TempNum = 0;static INT8U TempLen = 0;static INT16U TempCheckSum = 0;switch(AnalysePlus4){case 1:if(LIN_Data == 0x55){AnalysePlus4 = ID_LEN;/*下一个将接收ID信息*/}else{AnalysePlus4 = IDLE;TempLinData.ErrorType = SYNC_ERR;}break;case 2:TempData = (~(BIT(LIN_Data,1)^BIT(LIN_Data,3)^BIT(LIN_Data,4)^BIT(LIN_Data,5)))<<7;TempData |= (BIT(LIN_Data,0)^BIT(LIN_Data,1)^BIT(LIN_Data,2)^BIT(LIN_Data,4))<<6;if(TempData == (LIN_Data&0xC0)){TempLinData.CMD_ID = LIN_Data;#if (LIN_CHECKSUM_MODE == 0)TempCheckSum = 0;#elseTempCheckSum = TempLinData.CMD_ID;#endiffor(TempNum = 0; TempNum < LIN_ID_NUM; TempNum++){if(TempLinData.CMD_ID == LIN_ID_List[TempNum][0]){TempLinData.WorkMode = LIN_ID_List[TempNum][1];#if (LIN_LEN_MODE == 0)TempLinData.Len = LIN_Len[((LIN_Data>>4)&0x03)];#elseTempLinData.Len = LIN_ID_List[TempNum][2];#endifif(TempLinData.WorkMode == SLAVE_RX_MODE){TempLen = 1;AnalysePlus4 = DATA_GET;}else if(TempLinData.WorkMode == SLAVE_TX_MODE){AnalysePlus4 = IDLE;COMM_LIN_QPushStr(&LIN_RxMsg, &TempLinData);OSSemPost(LINRxSem);}return;}}AnalysePlus4 = IDLE; TempLinData.CMD_ID = 0; TempLinData.Len = 0;}else{AnalysePlus4 = IDLE;TempLinData.ErrorType = ID_ERR;}break;case DATA_GET:TempLinData.Data[(TempLen-1)] = LIN_Data;TempCheckSum += LIN_Data;if(TempCheckSum&0xFF00)TempCheckSum = (TempCheckSum&0x00FF)+1;if(TempLinData.Len > TempLen){TempLen++;}else{AnalysePlus4 = CHECKSUM;TempLinData.CheckSum = (INT8U)((~TempCheckSum)&0x00ff);TempLen = 0;}break;case CHECKSUM:AnalysePlus4 = IDLE;if(TempLinData.CheckSum == LIN_Data){COMM_LIN_QPushStr(&LIN_RxMsg, &TempLinData);TempLinData.CMD_ID = 0; TempLinData.Len = 0; TempLinData.CheckSum = 0;OSSemPost(LINRxSem);}else{TempLinData.CMD_ID = 0; TempLinData.ErrorType = CHKSUM_ERR;TempLinData.Len = 0; TempLinData.CheckSum = 0;}break;default:break;}}/******************************************************************************* 功能描述: LIN 接收数据处理程序** 全局变量:** 调用模块:** 编写人 : Rock.Wu** 编写日期:2012-09-17******************************************************************************/void LIN_DataAnalyse(void){COMM_Q_Status Q_Status_Data;INT8U i=0;Q_Status_Data = COMM_LIN_QQuery(&LIN_RxMsg);if((Q_Status_Data == COMM_Q_DATA)||(Q_Status_Data == COMM_Q_FULL)){if(COMM_LIN_QPopStr(&LIN_RxMsg, &LINTempData) == COMM_Q_OK){for(i=0;i<LIN_ID_NUM;i++){if(LINTempData.CMD_ID == LIN_CMD[i].CMD_ID){LIN_CMD[i].pFunc();break;}}}// Q_Status_Data = COMM_LIN_QQuery(&LIN_RxMsg);}}/******************************************************************************* 功能描述: LIN 从模式发送函数** 全局变量:** 调用模块:** 编写人 : Rock.Wu** 编写日期:2012-09-17******************************************************************************/void LinSend(INT8U *ComputeData){INT8U i = 0;#if (LIN_CHECKSUM_MODE == 0)INT16U TempData = 0;#elseINT16U TempData = LINTempData.CMD_ID;#endifif((LINTempData.WorkMode != SLAVE_TX_MODE)||(SendDataLen != 0))return;SendDataLen = LINTempData.Len+1;/*用SendDataLen做下标加上CHECKSUM的长度*/for(i = 0; i<LINTempData.Len; i++){LinSendBuf[(LINTempData.Len-i)] = ComputeData[i];TempData += ComputeData[i];if(TempData&0xFF00)TempData = (TempData&0x00FF)+1;}LinSendBuf[0] = (INT8U)((~TempData)&0x00ff);USART_ITConfig(UART4, USART_IT_TXE, ENABLE); /*启动发送中断*/}/*************************************************************************************************** End Of File*************************************************************************************************/
五、参考链接

若有收获,就点个赞吧
0 人点赞
