1 如何看待线性方程
例如求解如下线性方程: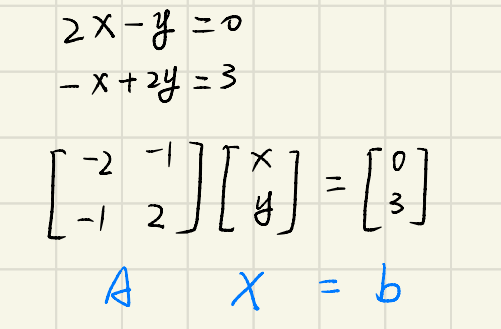
我们有两种看待方式,行图像(Row Picture)与列图像(Column Picture)。
- Row Picture
就是中学学的,看作是两条直线的交点:

最终得到解就是交点坐标 
- Column Picture

这是重中之重,是理解线性代数后面部分的基石。看作两个列向量的线性组合(linear combination of columns)。转变成求解:

求出来
x=1,y=2

【求解线性方程问题】
Can I solve  for every b?
for every b?
==>
Do linear combinations of the columns of  fill 3-D space?
fill 3-D space?
2 矩阵乘法、初等矩阵与消元
2.1 Matrix multiplication 矩阵乘法
一共有四种计算矩阵乘法的方式。假设现在要求:

【第一种】 的一行乘以
的一行乘以  一列
一列
这是国内大学课本里面教的,也是最难用的!!


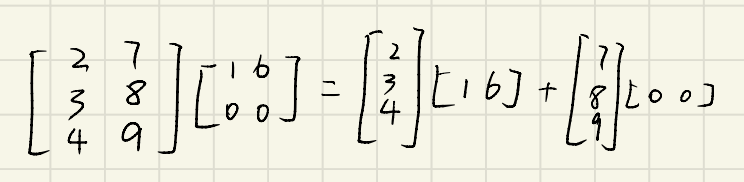
【第二种】 中的每一个列向量,都是
中的每一个列向量,都是  所有列向量的线性组合
所有列向量的线性组合
将  和
和  写成列向量的形式:
写成列向量的形式:
进而有: ,
,

【第三种】 中的每一个行向量,都是
中的每一个行向量,都是  所有行向量的线性组合
所有行向量的线性组合

 ,
,
【第四种】
第二种和第三种适合理解,而这一种最适合计算!
2.2 Elementary matrix & Elimination 初等矩阵与消元
考虑求解如下的线性方程
求解过程如下: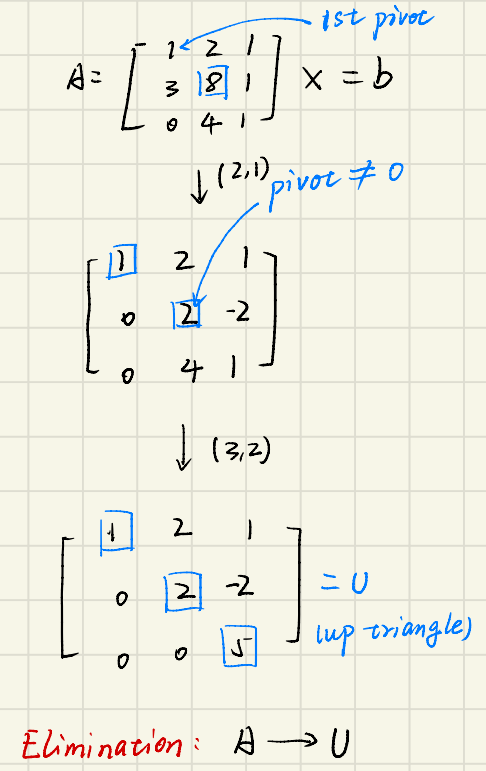
消元的结果是将矩阵  转换成了上三角矩阵(upper triangular matrix)
转换成了上三角矩阵(upper triangular matrix) 。
。
上面的第一步对  矩阵的第二行进行操作
矩阵的第二行进行操作  ,在图中使用
,在图中使用  进行标识。其效果等效于使用一个初等矩阵
进行标识。其效果等效于使用一个初等矩阵  乘以矩阵
乘以矩阵  :
:
这一点可以通过第三种矩阵乘法来解释:将矩阵  的三个行向量分别用
的三个行向量分别用  来表示,消元后的结果矩阵的第二个行向量
来表示,消元后的结果矩阵的第二个行向量  是
是  的线性组合,组合方式由初等矩阵
的线性组合,组合方式由初等矩阵  的第二行决定,即:
的第二行决定,即:

初等矩阵就是由单位阵(identity matrix)经过一次变换得到的矩阵,初等变换包括三种:
- 交换矩阵中某两行(列)的位置
- 用一个非零常数 k 乘以矩阵的某一行(列)
- 将矩阵的某一行(列)乘以常数k后加到另一行(列)上去
所以初等矩阵的逆矩阵也很好求,把对应的操作元变成相反数就可以。比如上面的  :
:
3 Inverse 逆矩阵
Invertible matrix 可逆矩阵(nonsingular matrix 非奇异矩阵)首先一定是方阵。
Invertible: we can solve  only when
only when  。也就是说
。也就是说  的列向量线性无关。
的列向量线性无关。
逆否命题 non-invertible: we can find  that
that  。证明如下:
。证明如下: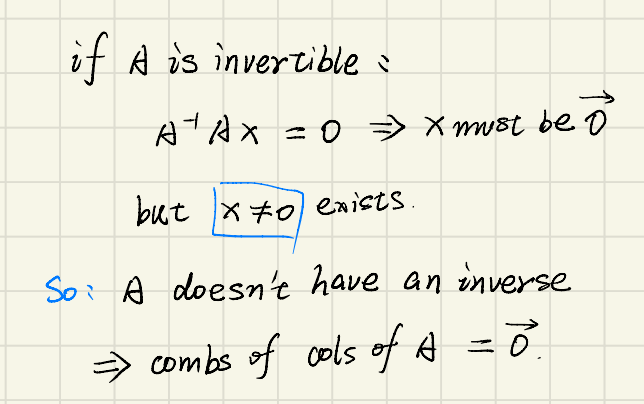
【逆矩阵的求法】Gauss-Jordan 法
Augmented matrix 增广矩阵。
方法正确性验证如下:
4 Factorization into A=LU LU分解
通过高斯消元法,我们将  中的矩阵
中的矩阵  转换成了一个上三角阵(upper diagonal),比如:
转换成了一个上三角阵(upper diagonal),比如:


可以转化成


因为初等变换阵的逆矩阵很好求,如果是乘数,则直接在相应位置求相反数就可以(可参考 2.2 节)。
假设这其中没有初等阵是用来交换两行的,则我们可以轻松的求出  矩阵,比如
矩阵,比如


而
我们发现  矩阵其实就是以前
矩阵其实就是以前  和
和  中的乘数取了一个相反数。当然,这是在没有初等阵是用来交换两行的这个前提之下的。可以发现,
中的乘数取了一个相反数。当然,这是在没有初等阵是用来交换两行的这个前提之下的。可以发现, 是一个下三角矩阵(lower diagonal)。
是一个下三角矩阵(lower diagonal)。
5 Solving Ax=b 解线性方程组 Ax=b
5.1 Solving Ax=0 解 Ax=0
假设  矩阵为:
矩阵为:
用解方程的高斯消元法,逐步迭代,有:
最后一步我们总会得到一个上三角矩阵  ,被称为 echelon 阶梯矩阵,当然按照正常解方程的步骤应该还有一步是把矩阵
,被称为 echelon 阶梯矩阵,当然按照正常解方程的步骤应该还有一步是把矩阵  中的主元(pivot),尽可能都化成 1,但是这里为了简单表示就少了这一步。在上三角矩阵
中的主元(pivot),尽可能都化成 1,但是这里为了简单表示就少了这一步。在上三角矩阵  中,有两列
中,有两列  有 pivot,而
有 pivot,而  这两列没有 pivot,所以
这两列没有 pivot,所以  代表的列被称为 povit columns,相应
代表的列被称为 povit columns,相应  两个变量被称为 pivot variables,而
两个变量被称为 pivot variables,而  被称为 free variables.
被称为 free variables.
在矩阵中有一个非常重要的概念叫秩 (Rank), ,等于 pivot variable 的数量。上例中,
,等于 pivot variable 的数量。上例中, 。
。
回到解方程,在大学学的线性代数中,我们可以让 free variables 任意取值,然后随之确定 pivot variables,这
样就确定了方程的解。
在一个  的矩阵中,
的矩阵中, 代表:
代表:
- 我们有
 个 free variables
个 free variables - 在
 这个方程中,只有
这个方程中,只有  个独立的方程组(有用的)
个独立的方程组(有用的)
所以解  的步骤:
的步骤:
- 消元(elimination)
- 找到 free variables (顺便可以找到 pivot variables)
- 为 free variables 选择相互独立的组合(
 ),并且解出对应的 pivot variables,一共有
),并且解出对应的 pivot variables,一共有  个,记为
个,记为 
- 最后使用任意变量
 做一个线性组合就得到了最终的解:
做一个线性组合就得到了最终的解:
在上例中,
 ,一共有 2 两个 free variables
,一共有 2 两个 free variables  ,所以分别做两个独立的组合:令
,所以分别做两个独立的组合:令  以及
以及  ,这样可以求解出两个特解
,这样可以求解出两个特解  ,最后得出
,最后得出  的解为
的解为  ,其中
,其中  是任意实数。
是任意实数。
上面
实际上长成了矩阵
的 nullspace,上面为 free variables 选取相互独立的组合,就是为了解出来的特解
是相互独立的,这样再进行线性组合得到
,就长成了矩阵
的 nullspace。
由所有特解组成的矩阵  就是作为矩阵
就是作为矩阵  的 nullspace 矩阵,里面的向量就是 nullspace 的基底。而确定了空间的基地,就相当于确定了整个空间:
的 nullspace 矩阵,里面的向量就是 nullspace 的基底。而确定了空间的基地,就相当于确定了整个空间:

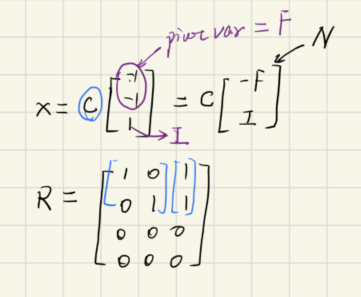
最后  的解可以写成这样:
的解可以写成这样:

其中  是
是  的矩阵,
的矩阵, 是用来组合
是用来组合  个基底的
个基底的  维向量,而且
维向量,而且  是
是  任意的向量,因为
任意的向量,因为  ,即
,即  矩阵乘以任何一个特解
矩阵乘以任何一个特解  都等于零。
都等于零。
由此还可以看出,矩阵 A 的 nullspace 是  中的一个
中的一个  维子空间。
维子空间。
Reduced row echelon form: pivot 位置的元素为 1,pivot 位置上下元素全都是 0,也就是我们从初中开始解方程组的形式
通过  矩阵可以快速求出 nullspace 矩阵
矩阵可以快速求出 nullspace 矩阵  :
:
5.2 Solving Ax=b 解 Ax=b
还是用上面的  矩阵:
矩阵:
上图最后一步得到的增广矩阵中,如果  ,则方程组有解,否则无解,因为
,则方程组有解,否则无解,因为  ,等式右边必须是
,等式右边必须是  。
。
如果  有解(solvability),则需要满足以下任意一个条件(实际上是对
有解(solvability),则需要满足以下任意一个条件(实际上是对  向量的条件):
向量的条件):
 在矩阵
在矩阵  的列空间
的列空间  中
中- 如果在
 的 reduced echelon form 矩阵
的 reduced echelon form 矩阵  中某几行的元素全都是
中某几行的元素全都是  ,那么算出来的增广矩阵中
,那么算出来的增广矩阵中  向量一侧的那一个元素也必须是
向量一侧的那一个元素也必须是 
 的解
的解  ,即特解 + 通解。
,即特解 + 通解。

对于  ,当
,当  取不同值时的解的情况(假设秩
取不同值时的解的情况(假设秩  ),首先进行讨论:
),首先进行讨论:
1. 列满秩( ):解为 1 个或 0 个,如果有解
):解为 1 个或 0 个,如果有解  ,解为特解且唯一
,解为特解且唯一
- nullspace
 中只有零向量,没有 free variables
中只有零向量,没有 free variables  的列空间正好是
的列空间正好是  中的一个
中的一个  维空间,所以如果向量
维空间,所以如果向量  在
在  中则有解,否则无解
中则有解,否则无解- 行满秩(
 ):一定有解,一个或无数个
):一定有解,一个或无数个
- 行满秩(
 长成了
长成了  ,所以向量
,所以向量  一定在
一定在  中
中- 如果
 ,则一定存在 free variables,此时有无数个解
,则一定存在 free variables,此时有无数个解 矩阵
矩阵  可逆:对于任何
可逆:对于任何  有且仅有一个解
有且仅有一个解
综上( 代表
代表  矩阵的 reduced row echelon):
矩阵的 reduced row echelon):
- 当
 时,
时, ,有且仅有一个解
,有且仅有一个解 - 当
 时,
时, ,有一个解或无解
,有一个解或无解 - 当
 时,
时, ,有无数个解
,有无数个解 - 当
 时,
时, ,无解或有无数个解
,无解或有无数个解
6 投影矩阵与最小二乘
6.1 Projection 投影与投影矩阵
为什么我们需要投影?—-  可能没有解,但我们可以将
可能没有解,但我们可以将  投影到
投影到  的列空间
的列空间  上,求解
上,求解  来近似求解线性方程。
来近似求解线性方程。
首先考虑投影到一维空间(一条直线)的情况,将向量  投影到
投影到  上。
上。
最终  在
在  向量上的投影为
向量上的投影为  。所以我们定义在投影到一维空间的投影矩阵(projection matrix)
。所以我们定义在投影到一维空间的投影矩阵(projection matrix)

投影矩阵有如下性质: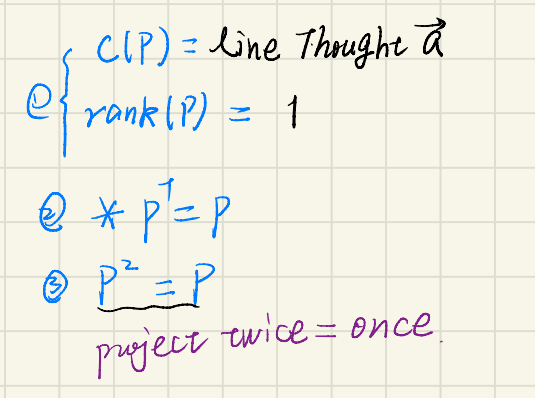
代表矩阵
的 column space.
随后考虑投影到二维空间(一个平面)的情况,将向量  投影到
投影到  形成的平面上。
形成的平面上。

得到 projection matrix 投影矩阵:
6.2 Least Square 最小二乘
最小二乘的思想:找到一条直线来拟合数据点,使得所有点到直线的距离平方和最小,比如:
最小化目标函数为:
当然,求解这个问题可以直接用求偏导等于零来计算:


得到:
还有就是投影的思想,的出来的  表达式跟上面的一样。最后求出来:
表达式跟上面的一样。最后求出来:

7 正交矩阵与 Gram-Schmidt 标准正交化
7.1 Orthogonal Matrix Q 正交矩阵

正交矩阵重要的性质: %22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-51%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMATHI-54%22%20x%3D%221119%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-51%22%20x%3D%221389%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-3D%22%20x%3D%222458%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-49%22%20x%3D%223515%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E#card=math&code=Q%5ET%20Q%20%3D%20I&id=qBj1Y)
%22%20aria-hidden%3D%22true%22%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-51%22%20x%3D%220%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20transform%3D%22scale(0.707)%22%20xlink%3Ahref%3D%22%23E1-MJMATHI-54%22%20x%3D%221119%22%20y%3D%22583%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-51%22%20x%3D%221389%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMAIN-3D%22%20x%3D%222458%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%20%3Cuse%20xlink%3Ahref%3D%22%23E1-MJMATHI-49%22%20x%3D%223515%22%20y%3D%220%22%3E%3C%2Fuse%3E%0A%3C%2Fg%3E%0A%3C%2Fsvg%3E#card=math&code=Q%5ET%20Q%20%3D%20I&id=qBj1Y)
同时,如果  是方阵,则
是方阵,则 
如果将  投影到正交矩阵的列空间
投影到正交矩阵的列空间  中,则:
中,则:
得到的结果就是,向量  的每一个分量
的每一个分量  ,其实就是点
,其实就是点  在坐标轴
在坐标轴  上的坐标:
上的坐标:

7.2 Gram-Schmidt 标准正交化
先正交化,然后再标准化。
前者就是投影,后者就是向量除以模长
首先是两个向量标准正交化的步骤:
上图我们最终想要求的是与向量
垂直的分量

最后推广到三个向量:
8 行列式、性质与计算公式
8.1 Determinant & Properties 行列式及其性质
Determinant 行列式的表示:
行列式的 10 条性质:3 条定义 + 7 条定理(由定义推出来的)



8.2 Formula for detA 行列式计算公式
使用上述 10 条性质推到公式!!!
首先是二阶矩阵的行列式:
经过分解,我们将原始的行列式拆成了 4 个行列式的和。
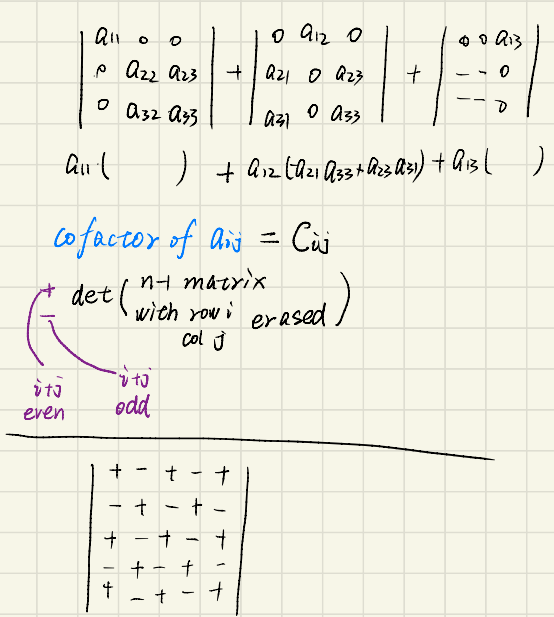
然后是三阶矩阵的行列式:
这里我们拆成了 33 个行列式的和
计算公式如下:
依次从每一行选择一个元素,各个元素的列不重复。
一旦上面选择的某一个元素为 0,那它代表的行列式就等于 0(因为有一列全零)。
8.3 Cofactors 代数余子式

使用伴随矩阵求逆矩阵:

9 Eigen value & vector 特征值与特征向量

- 使用矩阵乘以该矩阵的 eigen vector,其结果与原来的向量平行,只是进行了缩放操作
#pivots = #independent cols = **#λ's = #different eigen vectors**- 所以如果找到一组 eigen vector 组成的基底,将其他向量用该基底进行表示,就能使用上面矩阵幂次来大大简化计算
特征值与特征向量的计算:

矩阵的 trace 迹、特征值的积:

10 对角化与矩阵 A 的幂
10.1 DIagonalization 对角化

既然有特征值,那
**A**一定是一个方阵。
其中  为
为  的
的 n 个独立的特征向量组成的矩阵。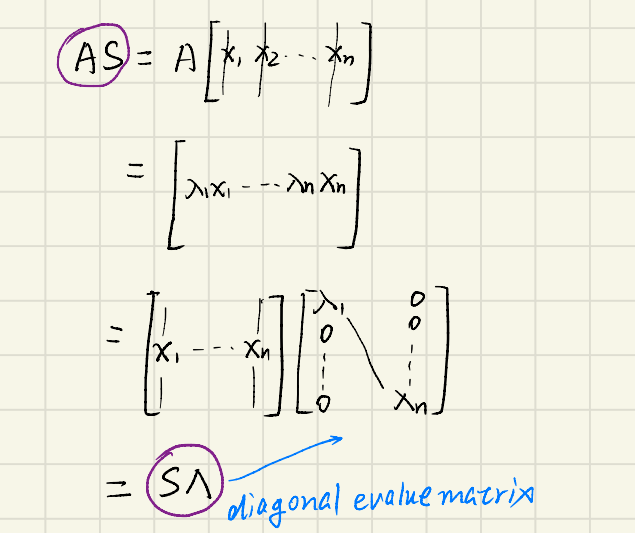
最终推出:
只要保证  的
的 **n** 个特征值不同,即可保证有 **n** 个独立的特征向量。
10.2 Power of A 矩阵 A 的幂
从  很容易得到
很容易得到  :
:

进而对于给定  以及等式
以及等式  ,我们有
,我们有

如果想求  的值,首先将
的值,首先将  的特征向量
的特征向量  看作一组基底,然后用这组基底表示
看作一组基底,然后用这组基底表示  :
:

那么
这个式子很有用:如果  ,则它代表的这一项
,则它代表的这一项  。
。
比如计算斐波那契数列增长的速度:

11 Markov matrix
- 所有的元素

- 每一列元素和都是


性质:
 是一个特征值,其余所有的
是一个特征值,其余所有的  均
均 
- 所以根据 9.2 节 Power of A,
 最终会达到一个稳定状态。
最终会达到一个稳定状态。

实例:
12 SVD 奇异值分解
Singular Value Decomposition.
其中  都是正交矩阵。
都是正交矩阵。
思想:设  ,
,
分别是矩阵  的 row space
的 row space  和 column space
和 column space  的正交基向量组成的基底。希望通过
的正交基向量组成的基底。希望通过  完成:
完成:
即

如何求解三个矩阵?
首先求  :
:

然后求  :
:
13 Linear transformation & their matrices 线性变换
线性性:
向量的各个分量、一个点坐标的意义;只有确定了基底,坐标才有意义:
进一步,

其中  的各列,其实就是
的各列,其实就是  轴的单位向量。
轴的单位向量。
线性变换,相当于变化坐标轴(也就是基底),而点的坐标保持不变。比如二维空间中逆时针旋转  的旋转矩阵:
的旋转矩阵:
看下图:
可以看到, 在新坐标系
在新坐标系  中的坐标还是
中的坐标还是  。假设变换后的
。假设变换后的  轴和
轴和  轴的单位向量为
轴的单位向量为  ,那么在新的坐标系下依旧有:
,那么在新的坐标系下依旧有:
而新的  轴和
轴和  轴的单位向量,在原
轴的单位向量,在原  坐标系下的坐标为:
坐标系下的坐标为:

OK,点到为止。
线性变换,线性说的是一件什么事:假如我们用函数  代表线性变换,则线性变换有如下性质:
代表线性变换,则线性变换有如下性质:

所以有:
即对  和
和  的线性组合进行线性变换,其结果等于先进行线性变换,再进行线性组合。
的线性组合进行线性变换,其结果等于先进行线性变换,再进行线性组合。
结合上面旋转矩阵的例子,有点意思。这里  就可以理解为两个基向量,组成一组基底;而
就可以理解为两个基向量,组成一组基底;而  则是向量在原基底
则是向量在原基底  和新基底
和新基底  中的坐标,没有发生变化!!
中的坐标,没有发生变化!!

若有收获,就点个赞吧
0 人点赞
