上一节我们已经得到了一个受到弹簧弹力(
),活塞的摩擦力(
)和外力(
)的二阶物理系统
现在,我们假设
, 得到一个
homogeneous equation当然,因为这仍然是一个物理系统,我们需要对这个方程的系数做一些限制
接下来,我们将对
三者的关系进行讨论,得到不同特性的
**unforced oscillator**
1 Undamped Harmonic Oscillator⭐
Intro
当
时,
, 这个简谐振子(
simple harmonic oscillator)的自然频率

分析
算例
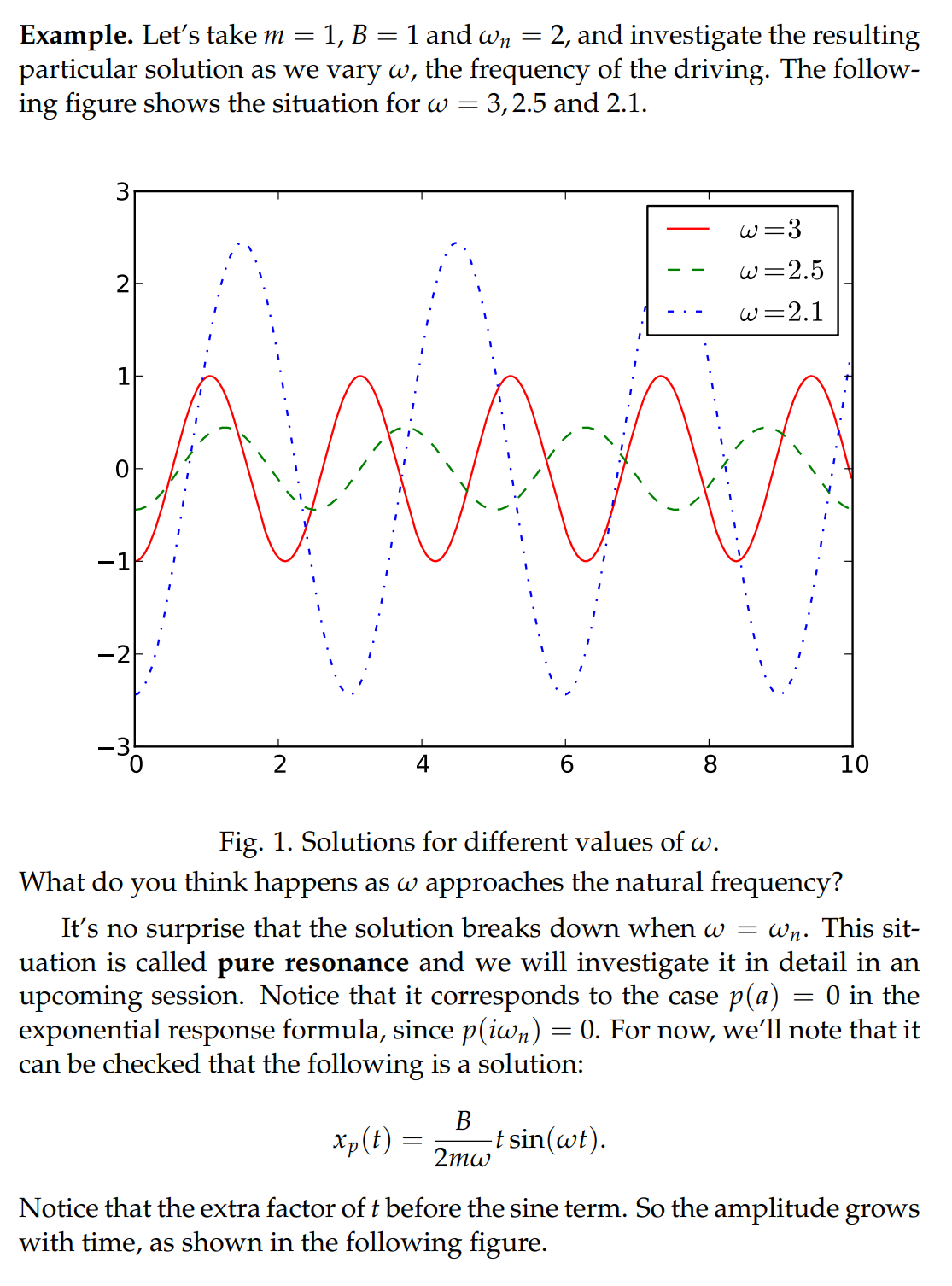
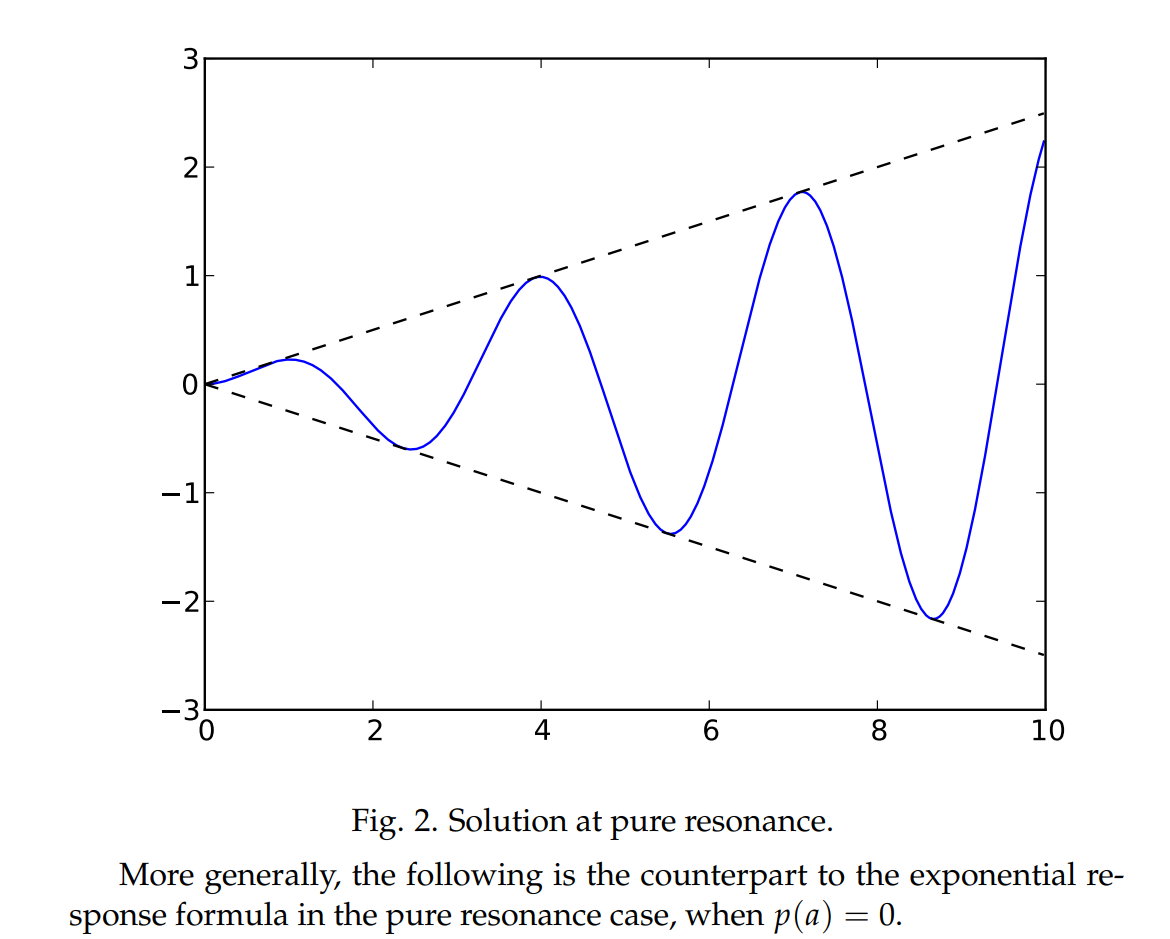
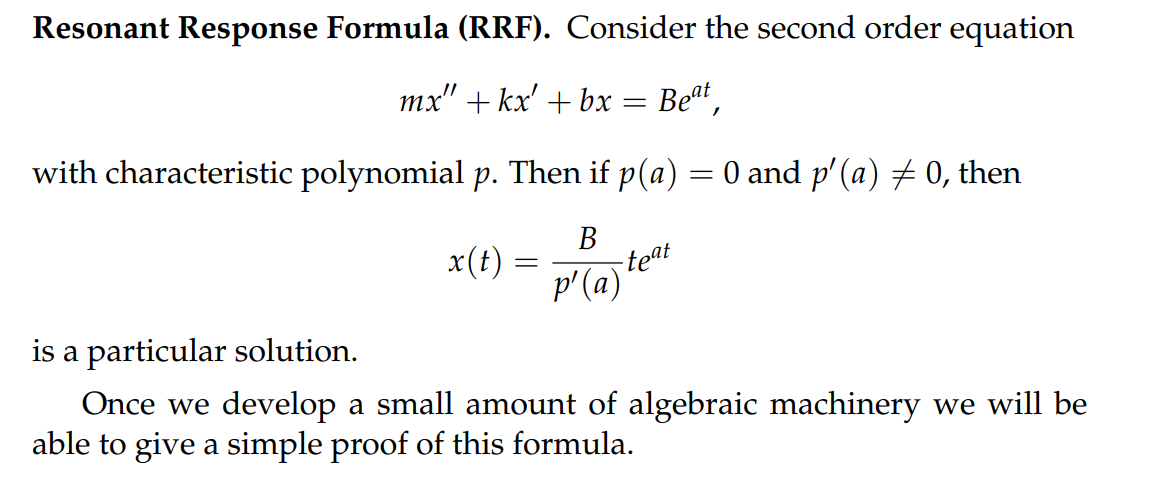
RRF(Resonant Response Formula)
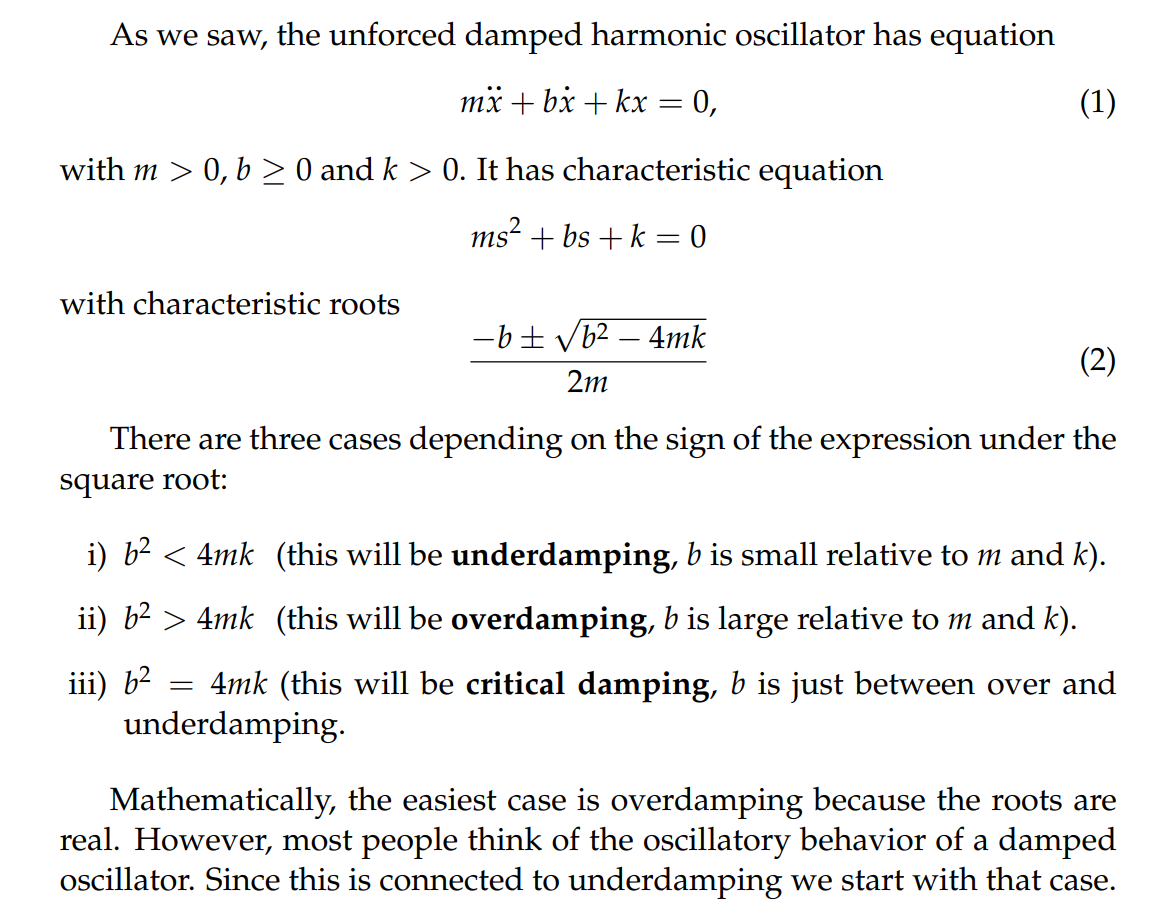
2 Damped Harmonic Oscillator⭐⭐⭐
2.0 总览
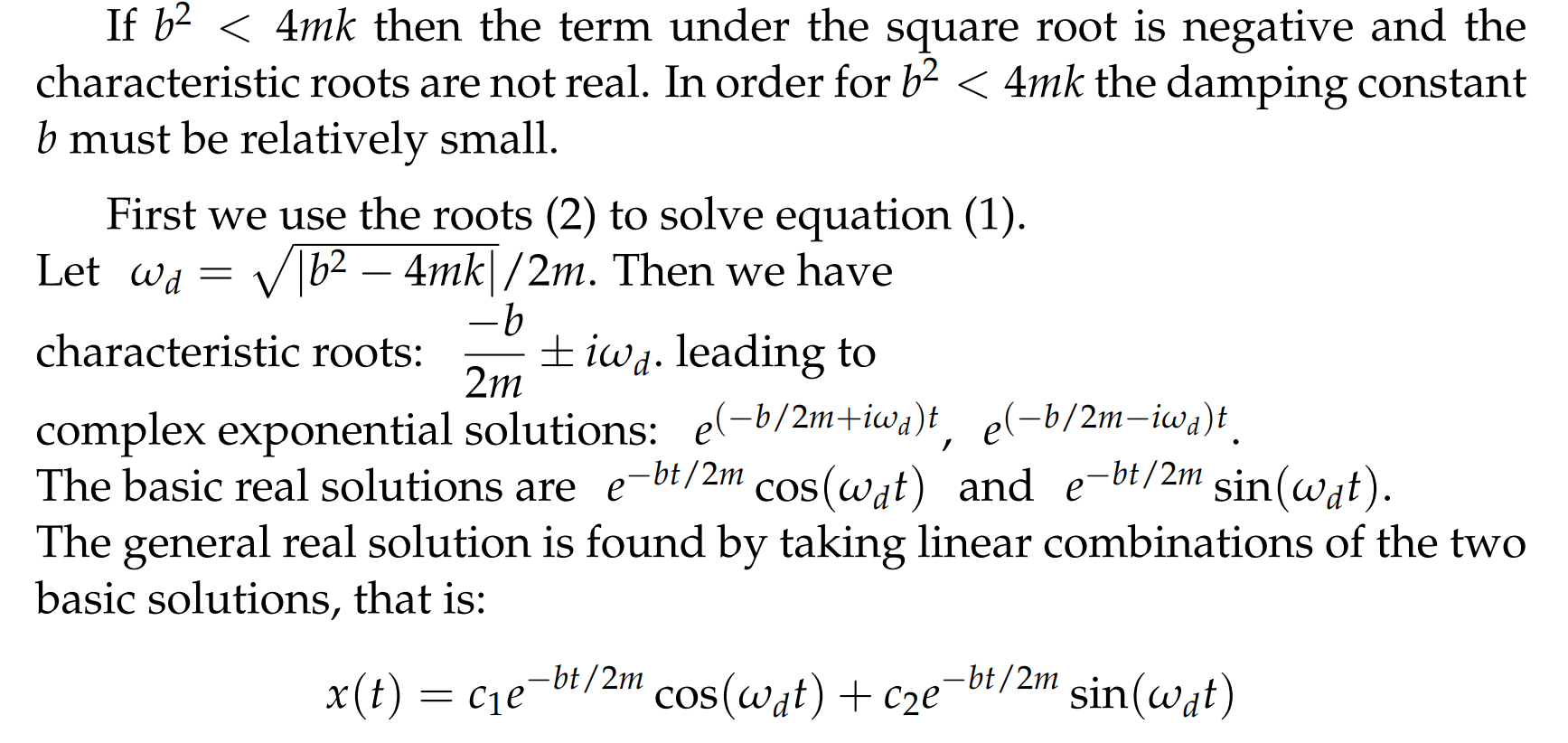
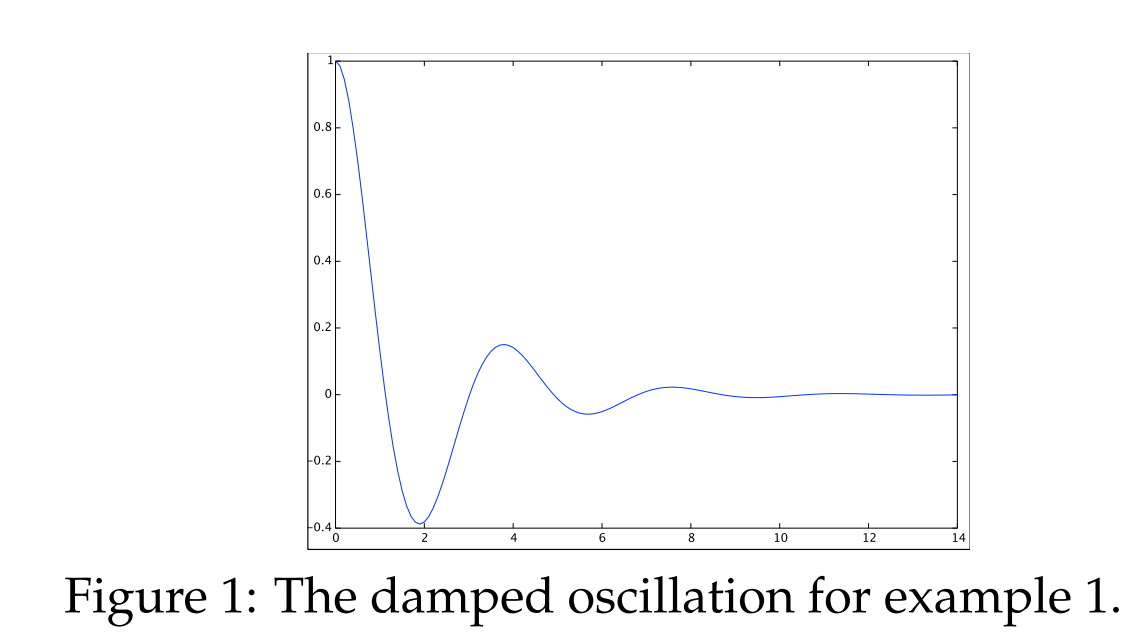
2.1 Underdamping(non-real complex roots)
推导

分析
系统的
Response形如
- 由于
,
会随着
的增大逐渐变为
。也就是振幅会越来越小,趋近于0
- 我们习惯于把
叫做
**damped angular frequency**或者**pseudofrequency**

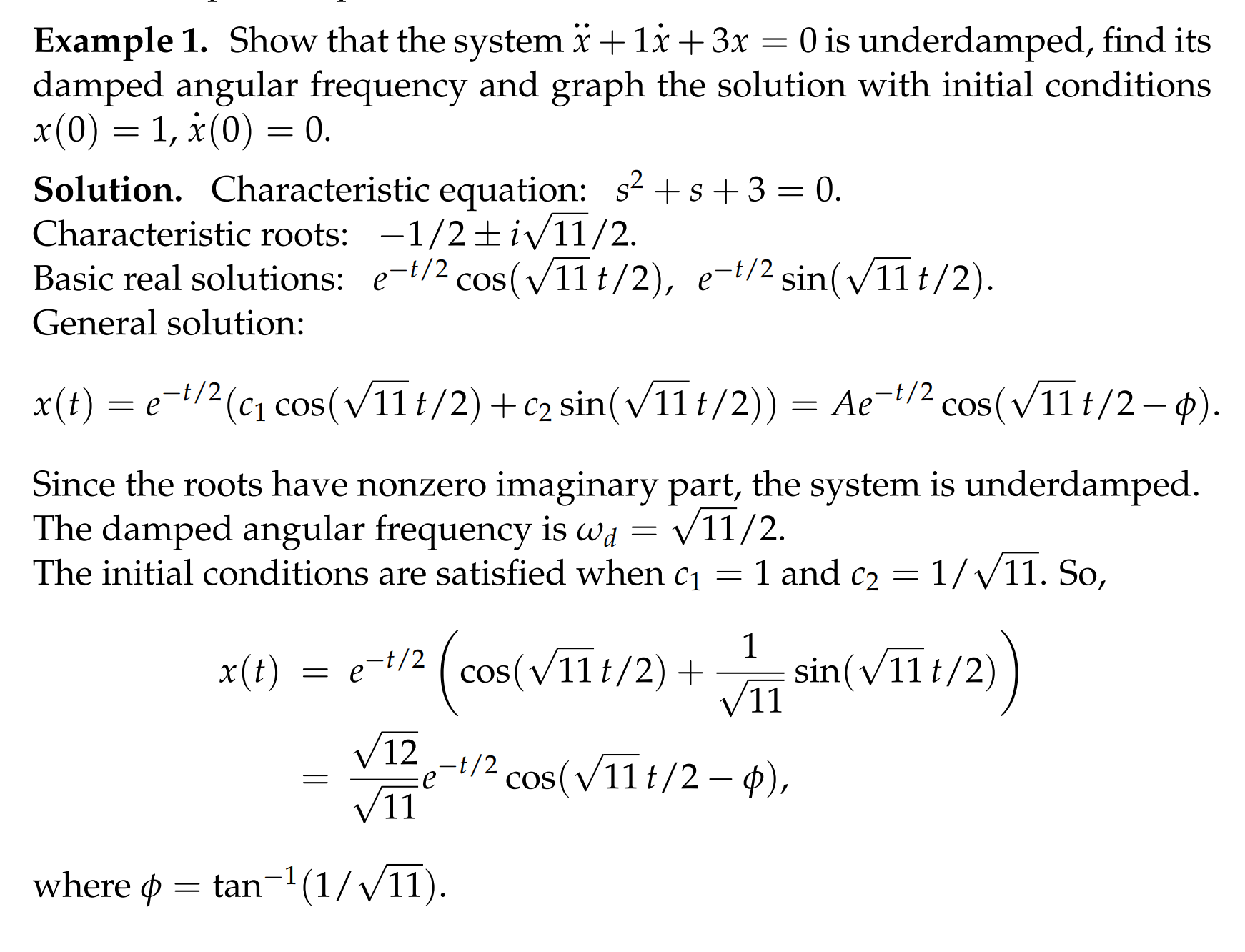
算例
2.2 Overdamping(distinct real roots)
推导
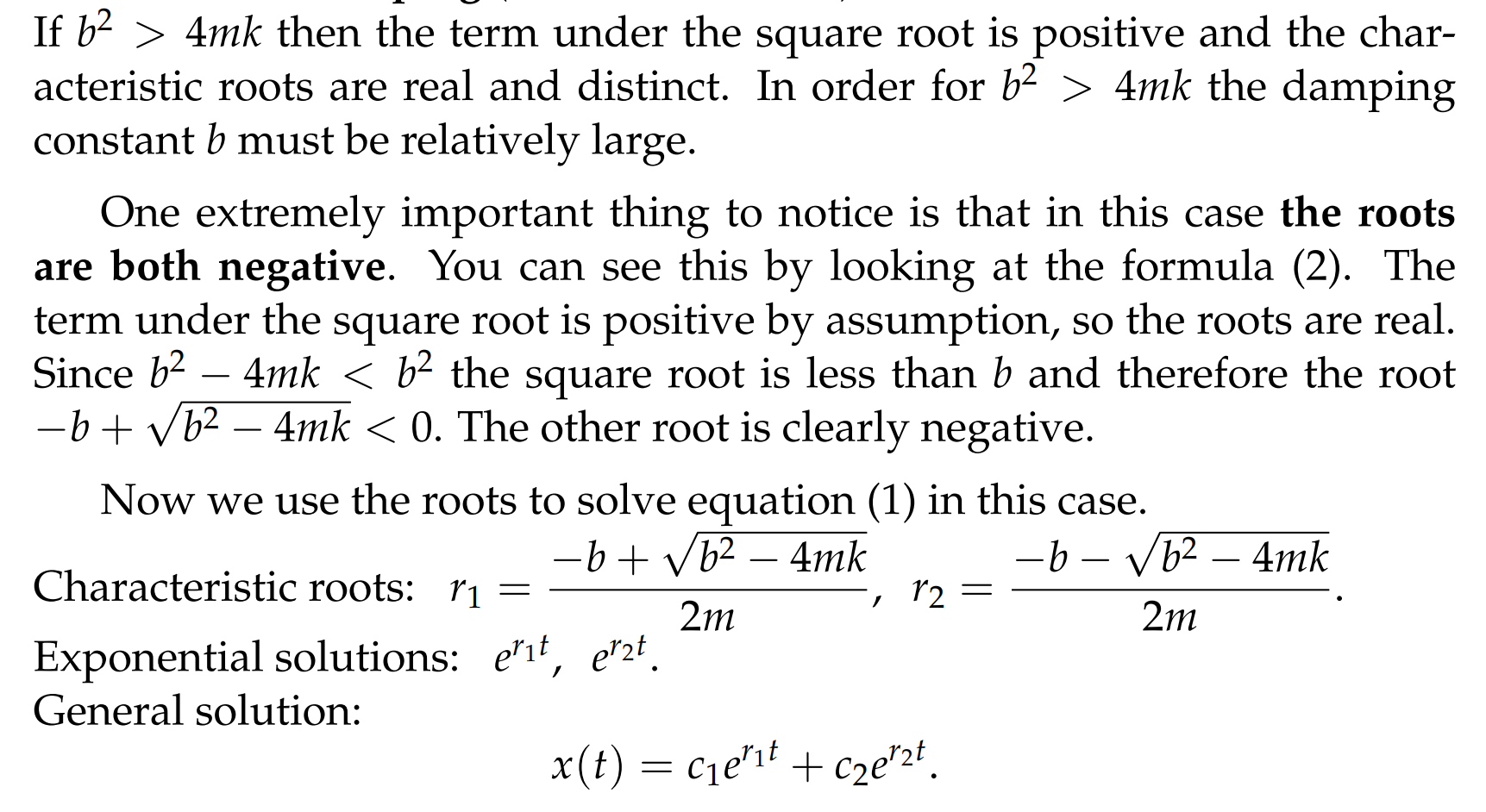
由于
, 所以可以推导出,两个实根一定都是负的
分析
由于我们的
中没有出现三角函数,所以系统实际上是不会振动的, 最后趋近于稳定点
下面是一段弹簧门的描述:

算例

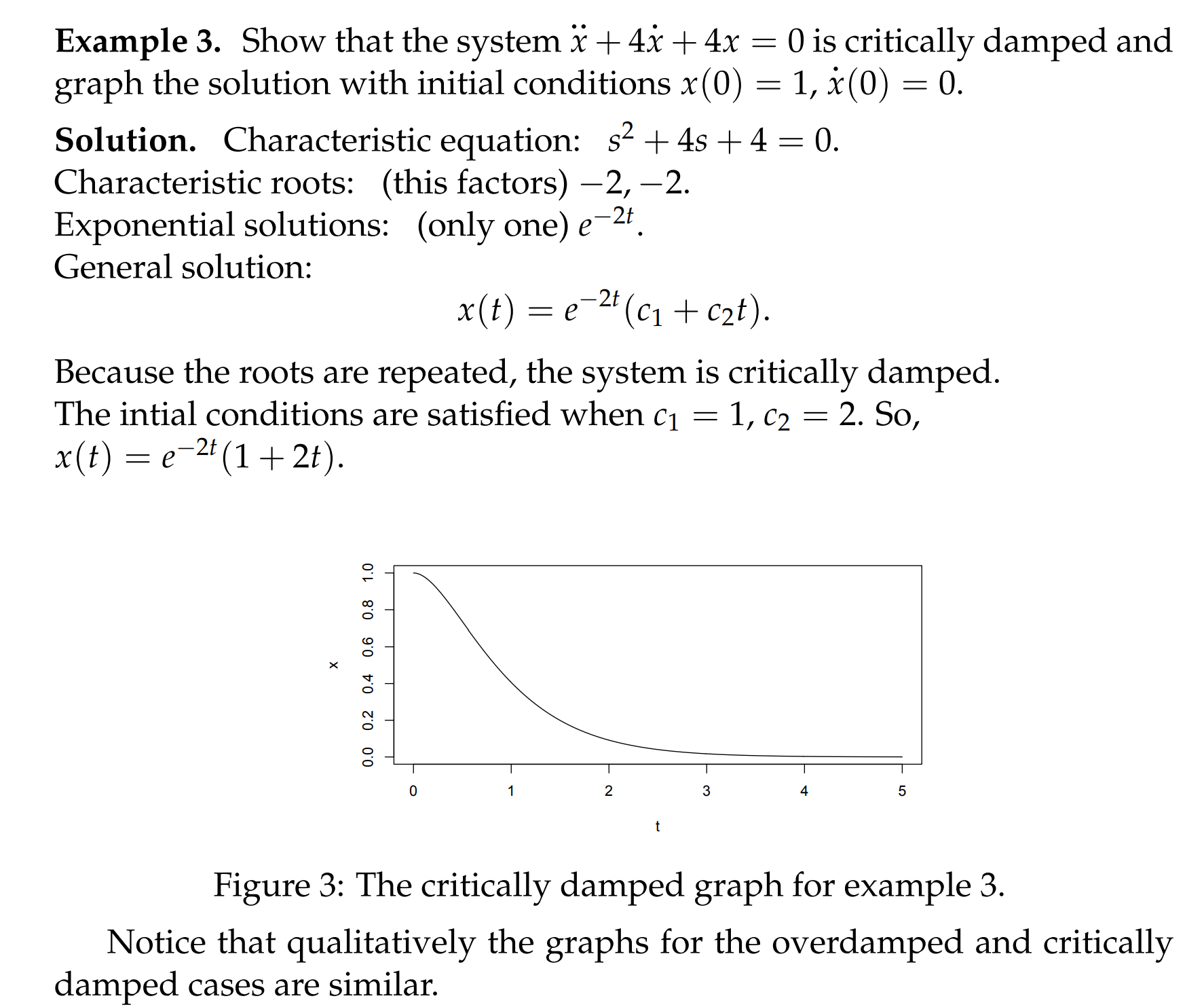
2.3 Critically Damping
推导
算例
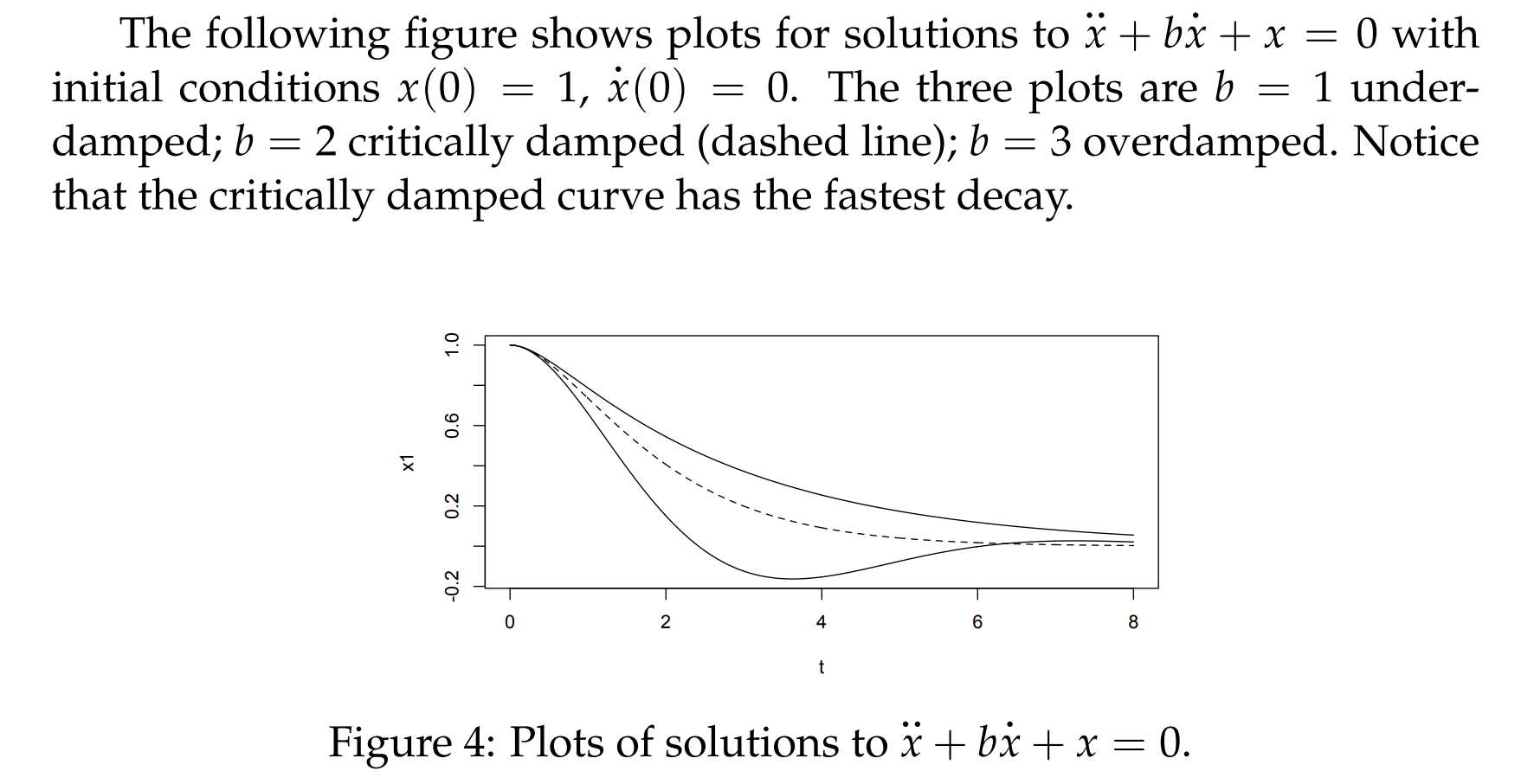
2.4 比较分析
3 练习
课堂练习⭐
练习1
Assume an unforced overdamped spring-mass dashpot started at
. Show that it never crosses the equilibrium position
for

:::success
我们有 ,
,
- 因为
overdamped的情况下, 我们的
- 我们有
 ,也就是
,也就是
接下来我们假设 在某个
在某个 的瞬间与
的瞬间与 轴相交了
轴相交了 ,
, 

我们联立 , 得到:
, 得到:  ,
, , 与我们的假设矛盾,所以不存在这样的
, 与我们的假设矛盾,所以不存在这样的 :::
:::
练习2
Show that regardless of initial condition, an overdamped oscillator can cross equilibrium position at most once
:::success
根据 , 当
, 当 时,有且仅有一个
时,有且仅有一个 满足
:::
满足
:::
课后作业

若有收获,就点个赞吧
0 人点赞
