1 Introduction
 :::success
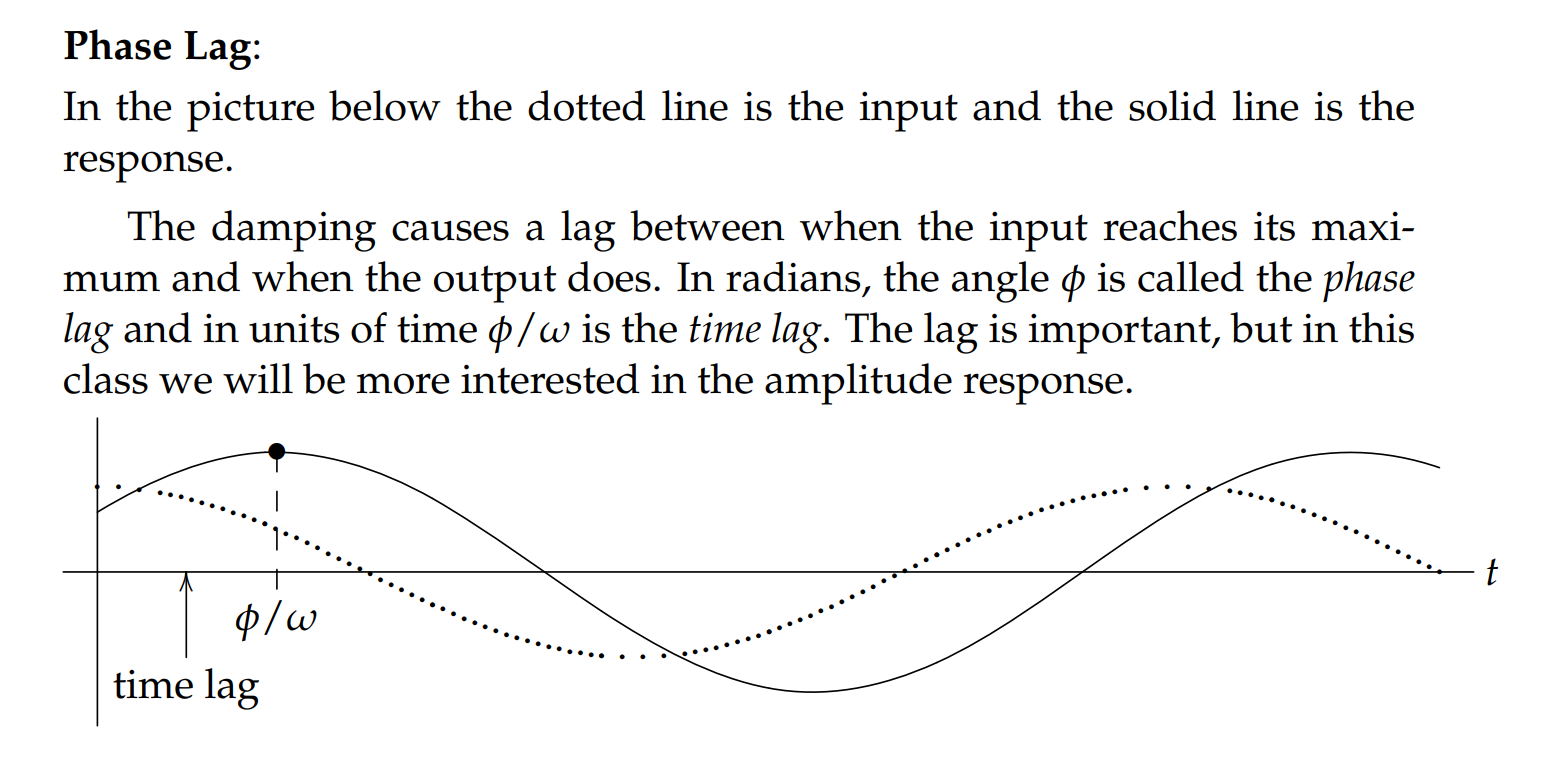
This session looks at how the response of a system with sinusoidal input changes as the frequency of the input changes. In particular, we will want to understand the gain and the phase as functions of frequency.
:::success
This session looks at how the response of a system with sinusoidal input changes as the frequency of the input changes. In particular, we will want to understand the gain and the phase as functions of frequency.
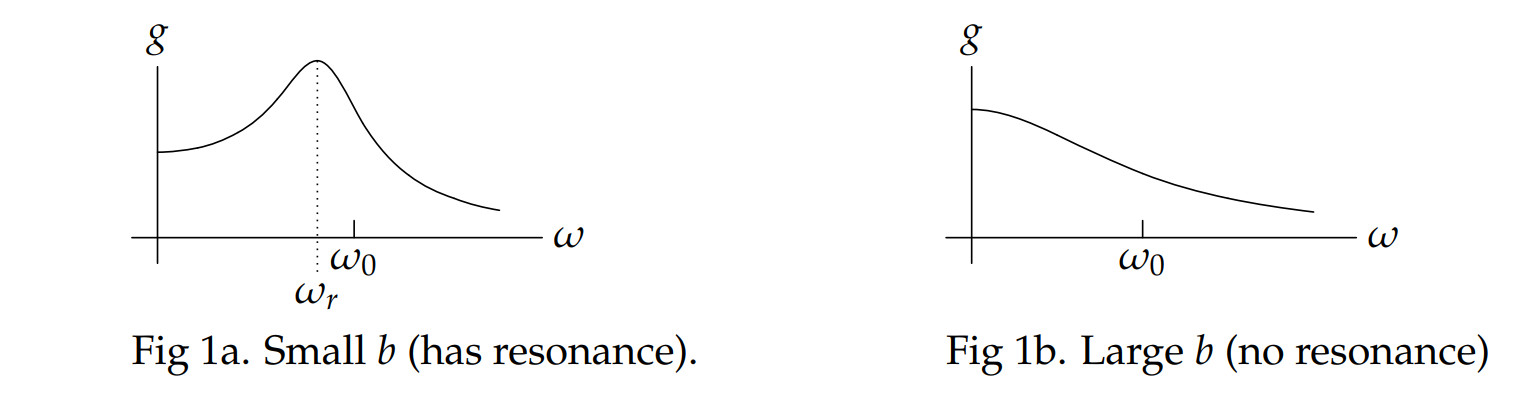
- For the gain, which we call frequency response(振幅), we will want to find the frequency that maximizes the response. When this frequency(频率) exists we will call it the resonant frequency of the system.
- For undamped systems it is called pure resonance and corresponds to an infinite amplitude.
- For damped systems it is called practical resonance and corresponds to a finite amplitude. :::
2 正弦驱动系统(Sinusoidally Driven Systems)
Recap
对于一个二阶常系数线性微分方程(通常用于建立:
damped forced hormonic oscillator) 我们有,
是质量,
是阻尼系数,
是系统的自然频率(
natural frequency),是正弦驱动力
:::success
我们想要预测这个系统在不同的 的取值下的不同回应
:::
的取值下的不同回应
:::
Frequency Response
:::info
对于一个 的微分方程来说,我们有:
的微分方程来说,我们有:
- 微分方程的特征方程为

Gain(**Amplitude Response**):
Phase Lag(**Phase Response**):
Time Lag:
**Amplitude Response**和**Phase Response**统称为**Frequency Response**:::
Practical Response
我们知道, 对于
,
,
, ,
, 我们有

:::success
对于 , 我们想要知道在输入频率
, 我们想要知道在输入频率 变化的时候
变化的时候Gain的变化,我们很容易发现,对于分母我们定义:
- 当
 很大的时候,
很大的时候, 远大于
远大于 , 于是
, 于是
- 当
 较小的时候,
较小的时候, 小于0, 于是
小于0, 于是 , 此时,
, 此时, 有最大值, 我们称这时的
有最大值, 我们称这时的 为
为Practical Response
当然我们也可以对 求一阶导:
求一阶导: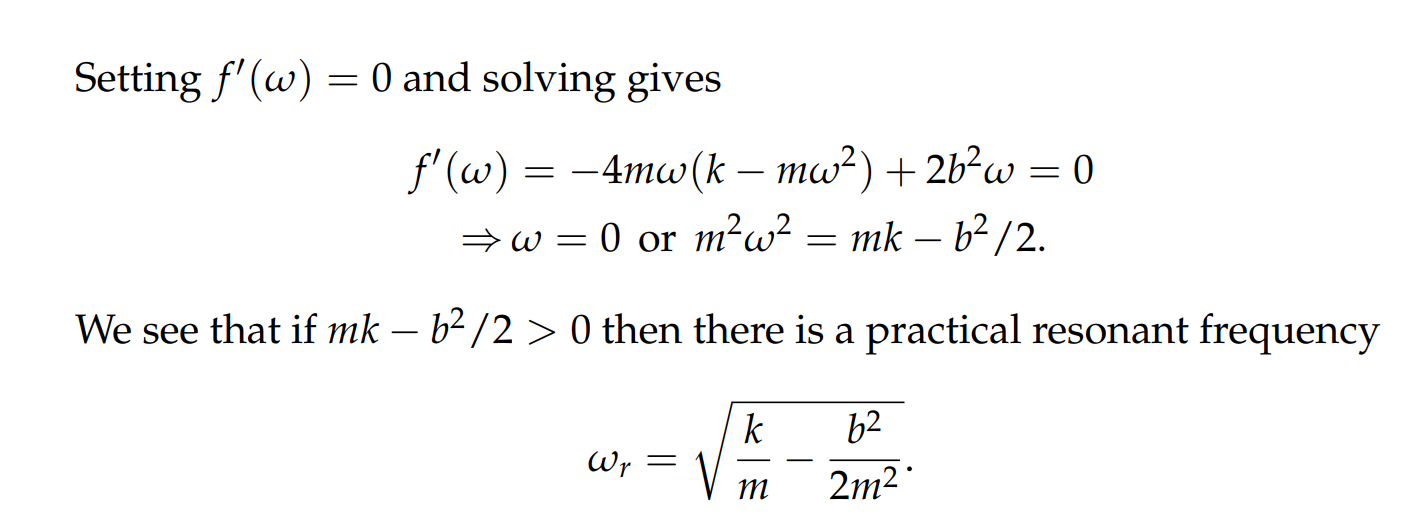 :::
:::
Phase Lag
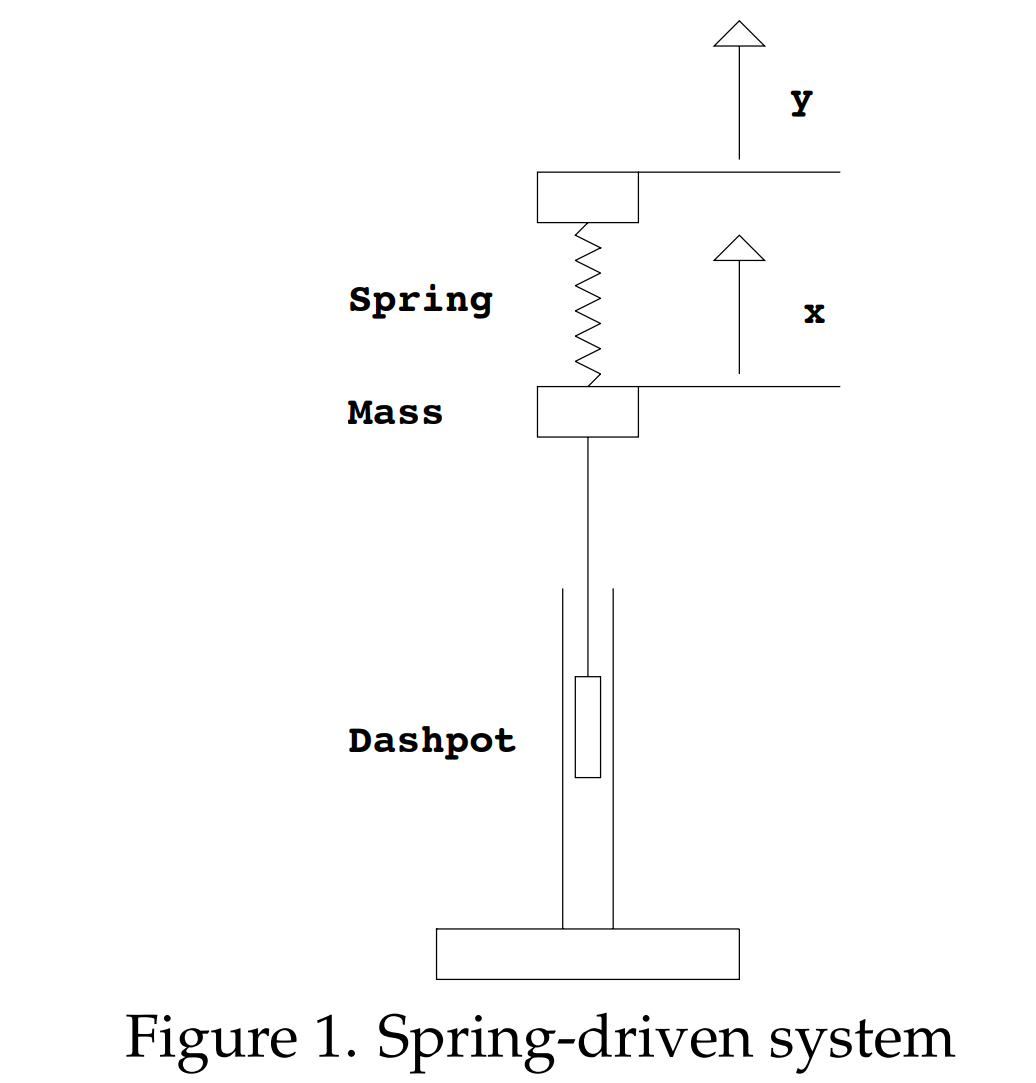
3 弹簧驱动机械振动系统1(Spring-Side Driven Mechanical System)
Intro
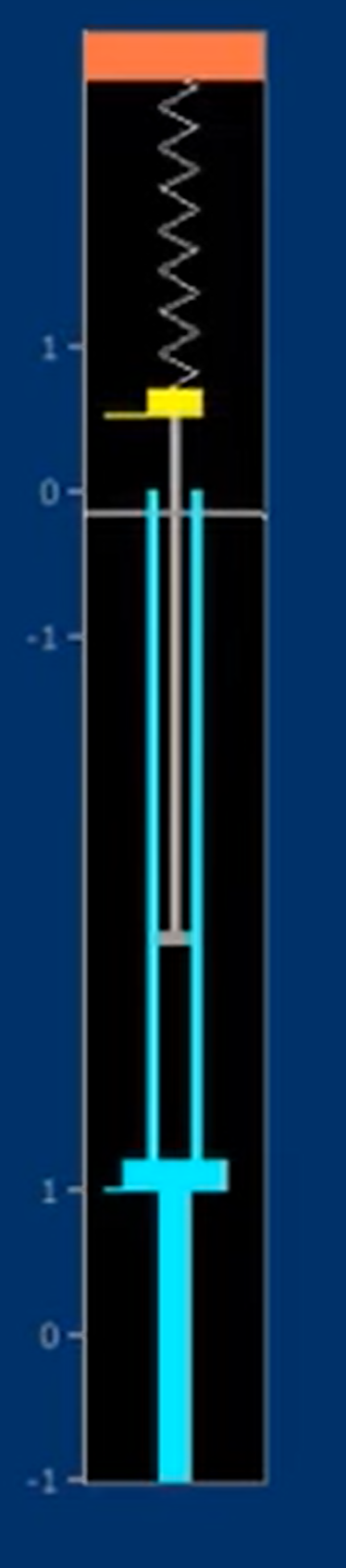
假设我们有一个弹簧缓冲系统(
spring-mass-dashpot system)如下图所示, 弹簧的上端可以自由移动 这个系统满足几个条件: 当x = y时,弹簧成自然状态 假设质点正在偏离平衡位置x=0向下运动,那么质点会受到两个力
- 一个是弹簧在非自然状态下的力, 假设此时
, 则弹力大小为
,方向向上
- 另一个是
Dashpot施加一个与质点的运动方向相反,大小与质点的运动速度成正比,大小为
此时我们对质点
m进行受力分析, 我们有, 化简之后我们得到
.

Derivation
对于我们刚刚得到的
, 根据我们在正弦驱动系统中的分析,假设
,我们有
.
我们发现,将输入增大
k倍之后,我们的Gain相应的增大k倍, 但是我们的**Practical Response**和我们的**Phase Lag**没有变化理论上,
Gain可以无限大



Practical Resonance Frequency
:::info
 , 和阻尼大小
, 和阻尼大小 以及劲度系数
以及劲度系数 相关
相关**Practical Resonance Frequency**:  , 和阻尼大小
, 和阻尼大小 以及劲度系数
以及劲度系数 相关, 用于最大化
相关, 用于最大化Gain或者Amplitude Response
:::
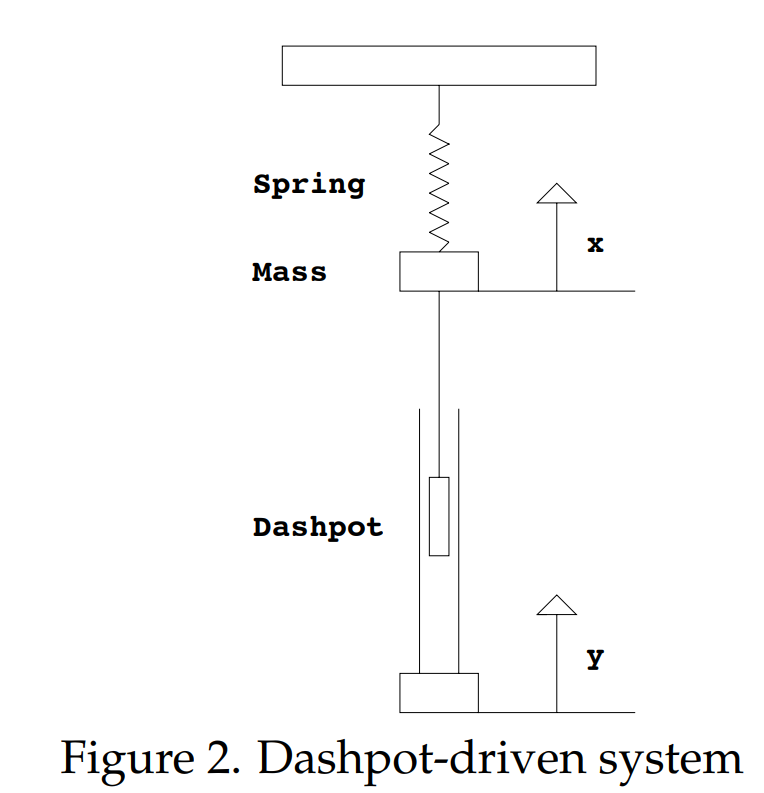
4 活塞驱动机械振动系统2(Dashpot-Side Driven Mechanical System)
Intro
假设现在我们的弹簧上端固定,但是活塞可以在竖直方向自由移动 同时:
- 活塞施加在物体上的力与
的一阶导成正比, 也就是和活塞与质点的相对运动速度成正比
时,施加的弹力为
于是我们有:



Derivation
假设我们的输入信号
, 所以
因此,我们的微分方程变为
随后,我们可以套用之前求解二次实常系数正弦微分方程的流程:
- 将
看做是
,
看做
,于是我们将微分方程变为
- 套用公式,我们有
,
Complex Gain,
- 由于
,是一个复数,我们可以将其写成:
,






:::info 我们有:
 , 所以
, 所以
**Gain**: =
=
**Phase Lag**: :::
:::
Practical Resonance Frequency
前面我们知道,
**Practical Resonant Frequency**就是**Gain**的最大值时候的**Input Frequency**
- 我们要求的,就是
- 分子最小的时候,我们有
, 此时
, 也就是说,
Resonant Frenquency和Natural frequency相同- 于是我们求得: 在
的时候,
,也就是说
**Practical Response**是**1**我们发现,
Practical Resonant Frquency发生在
, 且和
的取值,也就是阻尼系数的大小无关。

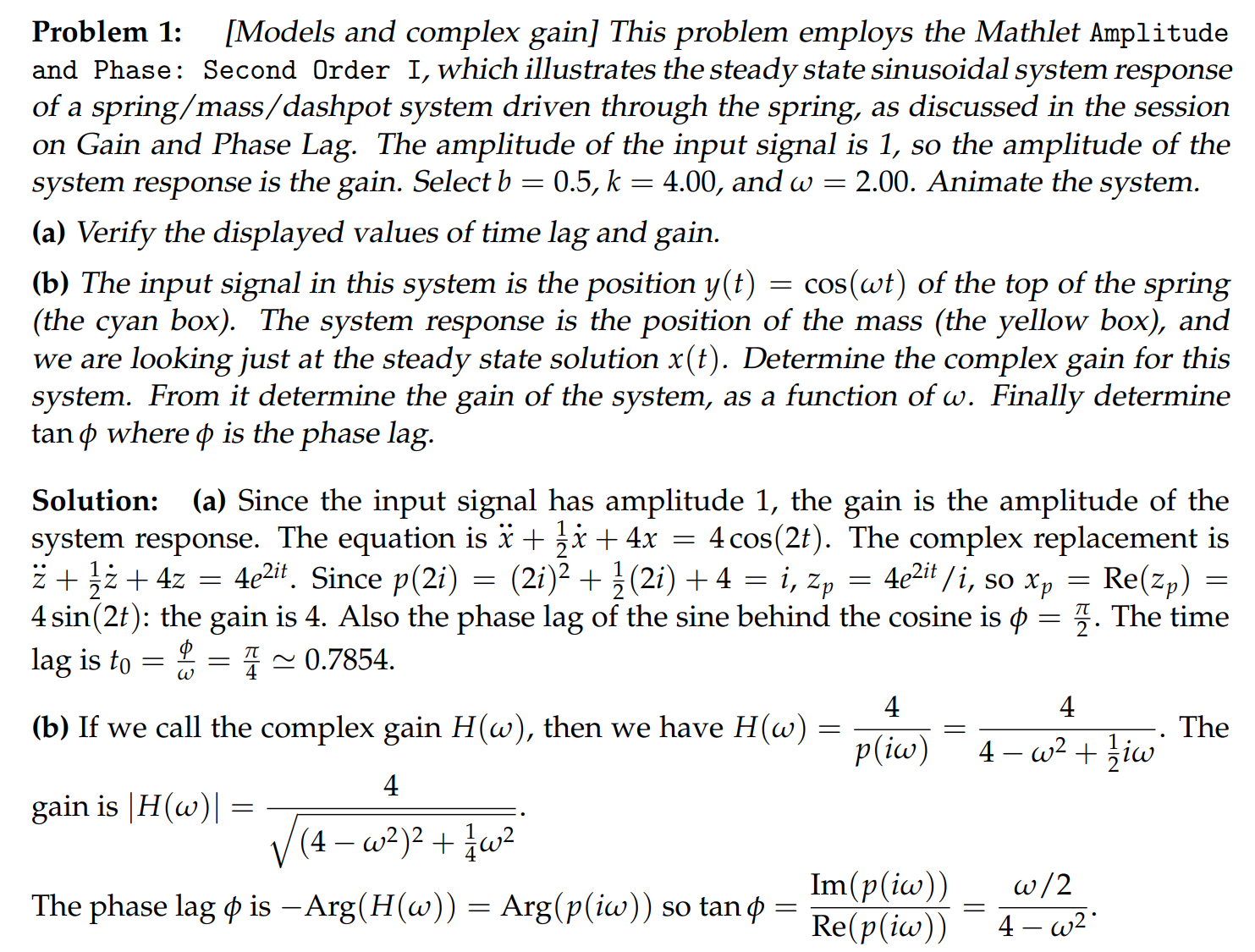
5 Applet Explorations
弹簧驱动
Applet1: Spring-Side Driven Mechanical System
可以验证:
- 我们的
Practical Response会随着和
的改变而改变
总是出现在
的左侧
- 随着阻尼系数
的减小,
Resonant Frequency会逐渐增大到

活塞驱动
Applet2: Dashpot-Side Driven Mechanical System
可以验证:
- 在阻尼系数
发生改变的时候,我们的
Practical Response不会发生改变,一直是1- 阻尼系数
很小的时候,
改变符号的频率非常的大
一起驱动
Applet3: Both-Side Driven Mechanical System
奇怪驱动
Applet4: Strangely Driven
6 总结⭐
:::info
对于一个 的微分方程来说,假设
的微分方程来说,假设**input signal**是 我们有如下性质:
我们有如下性质:
- 微分方程的特征方程为

- 微分方程的一个复数特解为

- 实数特解为
 ,
, 
Complex Gain:
Gain:
**Amplitude Response**:
**Phase Lag**(**Phase Response**):
Time Lag:
**Amplitude Response**和**Phase Response**统称为**Frequency Response**Complex Gain到Gain的推导: :::
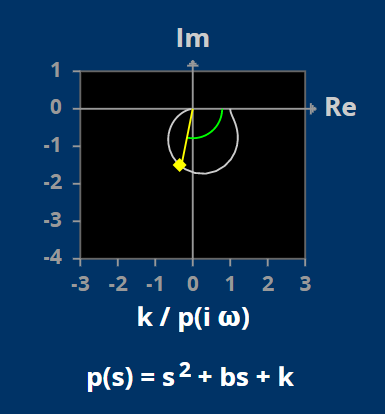
:::**Bode Plot**: 和
和
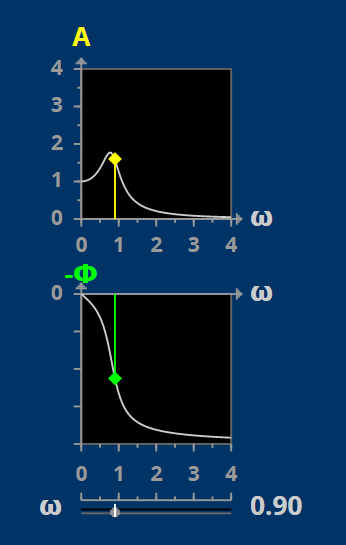
**Nyquist Plot**: ,绿色的角度就
,绿色的角度就 ,注意是负数
,注意是负数
7 Problem Sets
Practice Problem
练习1⭐
Problem Set 1
Problem Set 2
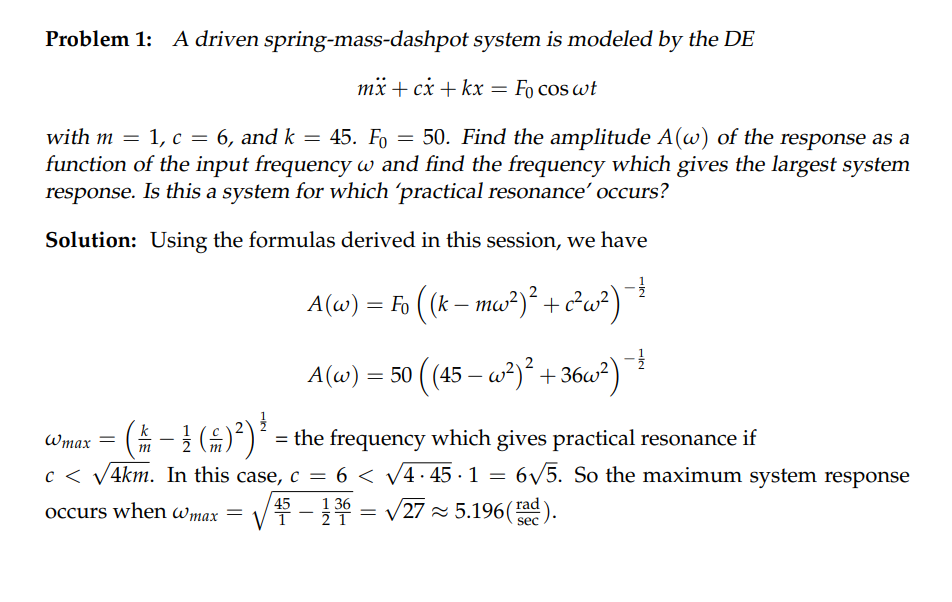
Problem 1
时刻记住,
Gain的定义是Output Amplitude/Input Amplitude在本题中,Input signal是, 注意不是


若有收获,就点个赞吧
0 人点赞
