电子水泵驱动电机控制器的硬件设计方案可以分为:电源单元、主控单元以及功率驱动单元。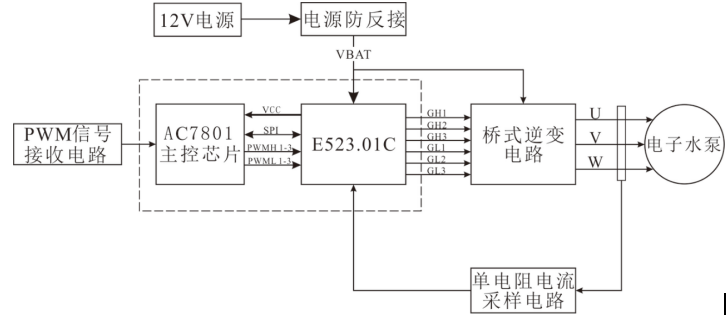
上面是整体方案的框图。
电源单元
电源单元主要包括开关稳压电源、电源防反接以及降压模块。
开关稳压电源作为整个控制系统的电源输入,具体为12 V的低压直流电源;
防反接
电源防反接电路主要是由PMOS所搭建的一个防止电源正负极反接误操作的功能电路;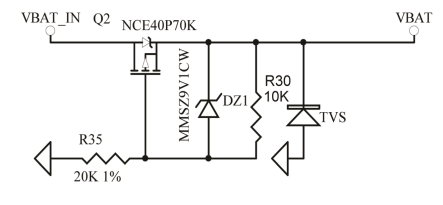
防反接电路选用P-MOS型号为NCE40P70K,其参数规格为:漏源电压VDS=-40 V,漏极电流ID=-70 A,导通电阻RDS<10 @VGS=-10 V,由此可计算出当电机满功率运行时该MOS管功耗为0.36 W。同时,在P-MOS的栅极与源极间并联有DZ1稳压管,**DZ1稳压管**使得VGS稳定在9.1 V,其作用是保护MOS的VGS不被高压反向击穿损坏。在DZ1后装有单向TVS管,使用**单向TVS管可用于抑制浪涌**。
其实防反接还有很多的方法有机会给大家汇总下,做个对比。
降压模块
降压模块则是将12 V稳压直流电源降压为3.3 V的稳压直流电源来给主控单元供电,该模块电路主要集成于所选择的E523.01C芯片中。(这个模块是芯片内部自带的降压模块)
E523.01C可根据RVSEL电阻接地,将直流电源切换至3.3 V模式。
芯片内部的电源降压模块如图: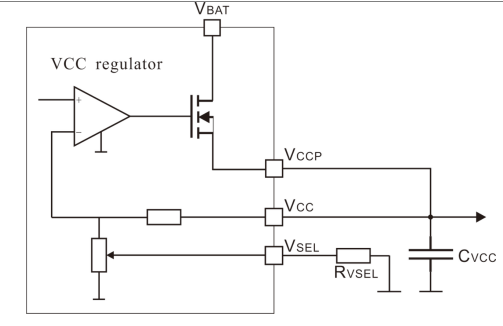
原理图中的实际设计电路如图: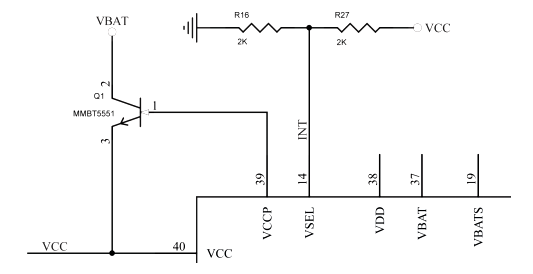
主控单元
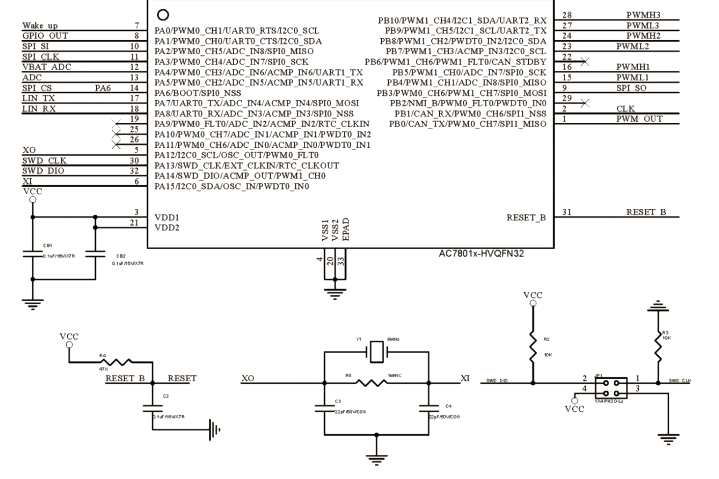
主控单元在控制器中主要为数据采集、三相逆变桥驱动信号输出和数据传输的作用。
主控芯片选择的是杰发科技所研制的国产车规级芯片AC7801,
其中数据采集主要负责母线电压采集、母线电流采集和相电流采集,
- 所采集到的母线电压主要用于过压保护以及欠压保护;
- 所采集到的母线电流主要用于过流保护;
- 所采集到的相电流主要用于滑模观测器的转子角度估算以及软件保护。
三相逆变桥驱动信号输出主要根据电机控制算法所产生的驱动信号,用来驱动三相桥臂的不同开关状态。
数据通讯功能主要为AC7801与E523.01C通过SPI通讯以进行数据交换。
功率驱动单元
功率驱动单元主要是为三相逆变桥电路,根据主控单元根据空间矢量脉宽调制算法所输出的六路PWM信号驱动三相桥臂。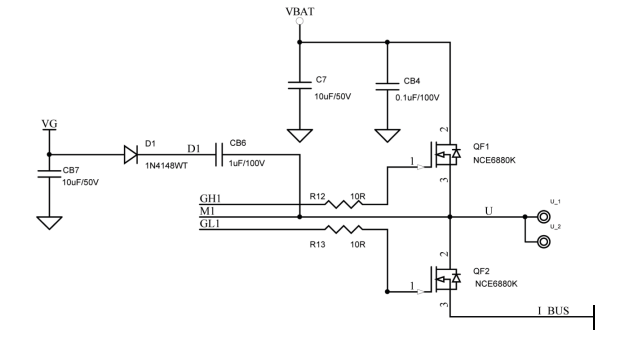
上图为U相桥臂驱动电路。
E523.01C可以输出六路驱动信号,其中三路用于下桥臂功率管的驱动,三路记过自举升压电路变成电位悬浮的驱动脉冲用于上桥臂的功率管驱动。
自举电路
自举二极管D1和自举电容CB6组成自举电路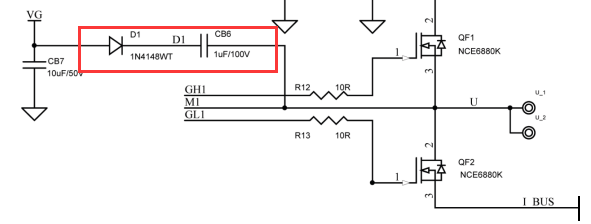
GH1输出低电平,GL1输出高电平时,下桥臂QF2开通,电源VG通过自举二极管D1、自举电容CB6、功率管QF2构成回路,对自举电容充电,不考虑功率管的导通压降,M1被下拉至电源的地。
当GH1输出高电平,GL1输出低电平时,自举电容通过内部电路放电,上桥臂QF1开通。
电流采样电路设计
采样方式确认为单电阻采样。
E523.01C内部集成有电流放大器,但具体的放大倍数需要根据外围电阻来确定,其内部采样放大电路如图: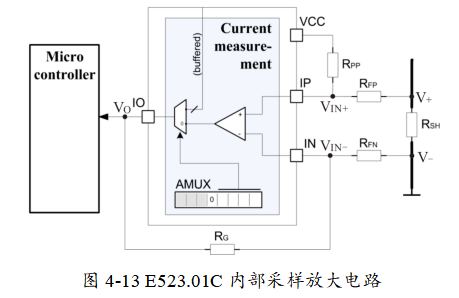
相电流采样放大电路如图: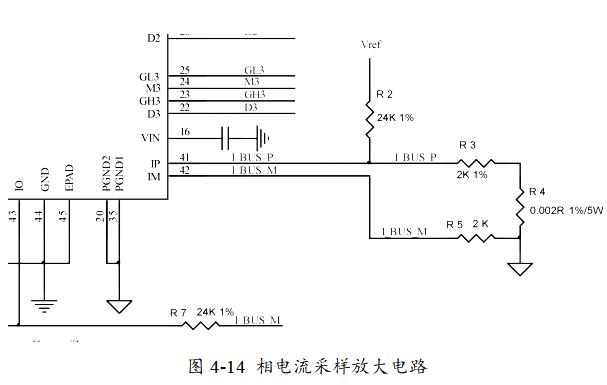

若有收获,就点个赞吧
0 人点赞
