变频器具有与专有Caliper软件通信的固件。使用该软件可以:
- 选择所需的变频器操作模式。
- 在旋转型和直线型或管型之间选择电机。
- 配置所有电机和驱动器参数。
- 保存、修改或重新加载以前配置的电机和驱动器参数。
- 配置、重新加载、修改和保存变频器集成软件应用程序的所有参数。
- 在操作过程中监控驱动器和电机。
- 执行整机模拟操作和现场总线命令的调试*。
- 执行霍尔传感器自动同步。
- 配置模拟输入。
- 配置数字I/O端口。
- 将驱动器配置为在报警条件下做出反应。
- 配置语言。
- 使用作用域(Scope)功能。
1 介绍Caliper
Calper软件需要PC Windows98®或更高版本,注册和登录后可从企业网站下载安装软件包:www.hdtlovato.com
1.位于顶部的工具栏(**Toolbar**)允许:
- 配置串行通信。
- 发送驱动命令信号,如接通、启用操作、复位、模拟现场总线协议和I/O功能。
- 使用作用域(Scope)功能。
- 同样在脱机模式下配置变频器参数,并执行霍尔传感器自动稳相(autophasing)。
2.位于下方的状态栏(**State bar**)显示:
- 驱动状态和任何活动报警
- DC总线电源电压。
- 所连接驱动器的固件版本。
3.位于左栏的数据**监视器(Data Monitor)**提供有关:
- 连接的驱动器规格的信息。
- 实际变频器操作模式(现场总线或I/O)。
- 实际控制拓扑(模式)。
- 电机速度和位置参数以及驱动电流和温度。
- 实际数字I/O功能和状态(带有状态的图形视图)。
4.位于数据监视器右侧的树状视图中的菜单(**Menu**)允许设置所有变频器参数:
- 操作模式选择(现场总线菜单项)。
- 电机和反馈数据参数(电机数据菜单项)。
- 高级设置参数(高级设置菜单项)。
- 控制拓扑选择(菜单项取决于现场总线菜单项中所需的操作模式)。
5.驱动器数据(**Drive Data**)允许:
- 直接配置菜单参数。
- 设置与因子(Factors)子菜单相关的所需应用程序。
刚才描述的Caliper主窗口和相关工具栏如下图所示: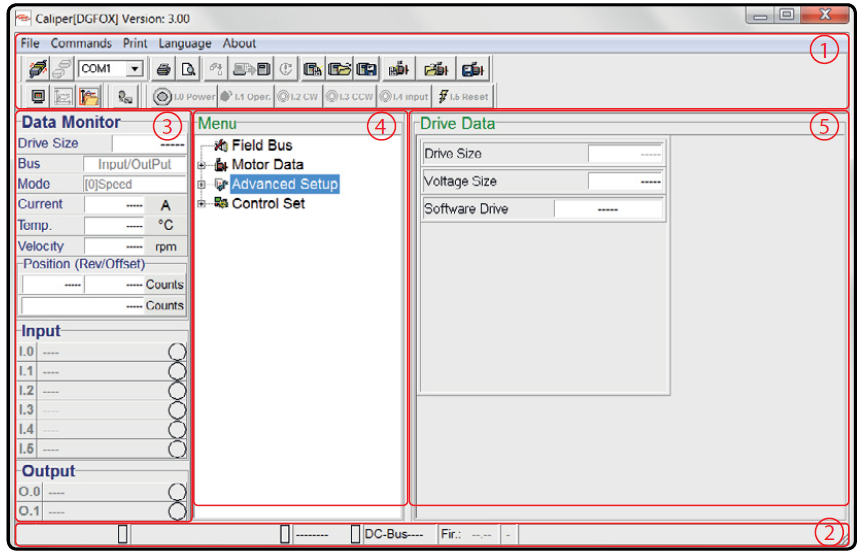
- 将鼠标指向图标,将出现简短说明,显示功能。
- 要确认任何修改的参数(并自动发送到变频器),请按Enter键,或者您可以启用命令菜单中的自动保存功能,将任何修改的参数发送到变频器(状态栏中会出现标签‘A’=Automatic)。
- 有一个“隐藏菜单”(只能在命令菜单中输入密码才能进入),允许设置用户不感兴趣的其他关键参数(电压、I2T驱动器和温度阈值)。
工具栏中的主要软件图标如下所示: 驱动器和PC连接:选择正确的PC COM端口,然后按键连接驱动器。下方的状态栏显示连接是否正常。
驱动器和PC连接:选择正确的PC COM端口,然后按键连接驱动器。下方的状态栏显示连接是否正常。 驱动器和PC断开:RS232通信被禁用,驱动器在断开之前根据最新修改的参数继续运行
驱动器和PC断开:RS232通信被禁用,驱动器在断开之前根据最新修改的参数继续运行 正在将设置的配置加载到驱动器内存中。建议始终执行驱动器和电机参数的备份文件。
正在将设置的配置加载到驱动器内存中。建议始终执行驱动器和电机参数的备份文件。 加载默认参数:出厂设置将重新加载到驱动器内存
加载默认参数:出厂设置将重新加载到驱动器内存 电机自动调相:打开一个执行电机自动调相的窗口,以便验证电杆和霍尔传感器对齐。请确保在继续之前设置正确的编码器脉冲数。转子必须可以自由旋转。
电机自动调相:打开一个执行电机自动调相的窗口,以便验证电杆和霍尔传感器对齐。请确保在继续之前设置正确的编码器脉冲数。转子必须可以自由旋转。 通过Caliper进行本地控制:此键使Caliper软件能够启用适合每种模式操作的所有仿真信号和参数。这样,所有真实现场总线和I/O信号都不会被考虑。但是,一些输入信号作为限位开关被考虑用于机器调试操作。
通过Caliper进行本地控制:此键使Caliper软件能够启用适合每种模式操作的所有仿真信号和参数。这样,所有真实现场总线和I/O信号都不会被考虑。但是,一些输入信号作为限位开关被考虑用于机器调试操作。 接通
接通 启用操作
启用操作 “CW”(时钟方向)
“CW”(时钟方向) ‘CCW’(按计数器计时)
‘CCW’(按计数器计时) 输入4路
输入4路 重置
重置 停止
停止 ‘斜坡参考启用’
‘斜坡参考启用’ ‘斜坡解锁’
‘斜坡解锁’ ‘斜坡(Ramp)启用’
‘斜坡(Ramp)启用’
 ‘开始起始位置’
‘开始起始位置’
 “绝对/相对”引用参考
“绝对/相对”引用参考 ‘开始配额’
‘开始配额’ “更改”(Change set)
“更改”(Change set) “重置编码器”&“重置位置”
“重置编码器”&“重置位置” ‘轴/坐标系启用’
‘轴/坐标系启用’ 来回“慢跑”
来回“慢跑” 范围:打开一个窗口,显示允许监视某些驱动器变量的范围。
范围:打开一个窗口,显示允许监视某些驱动器变量的范围。 打开保存到PC目录中的范围文件。
打开保存到PC目录中的范围文件。 系统状态:打开一个窗口,显示任何ID代码为e的激活或发生的告警,告警和警告的类型信息。
系统状态:打开一个窗口,显示任何ID代码为e的激活或发生的告警,告警和警告的类型信息。 变频器设置:打开一个窗口,显示任何活动的或已发生的警报,其中包含有关警报和警告的ID代码e类型信息。
变频器设置:打开一个窗口,显示任何活动的或已发生的警报,其中包含有关警报和警告的ID代码e类型信息。 将电机+驱动器的所有驱动器校准设置保存到PC目录中。此程序将在首次启动程序时将所有变频器和电机数据保存到Caliper软件创建的默认文件夹中。可以更改保存文件夹目录。
将电机+驱动器的所有驱动器校准设置保存到PC目录中。此程序将在首次启动程序时将所有变频器和电机数据保存到Caliper软件创建的默认文件夹中。可以更改保存文件夹目录。 打开保存到PC目录中的驱动器校准设置。
打开保存到PC目录中的驱动器校准设置。 电机设置:打开一个窗口以显示所有电机设置参数,并允许您在尚未启用RS232连接的情况下创建校准设置。
电机设置:打开一个窗口以显示所有电机设置参数,并允许您在尚未启用RS232连接的情况下创建校准设置。 将所有电机校准设置和PID电流调节器保存到PC目录中。
将所有电机校准设置和PID电流调节器保存到PC目录中。 打开保存到PC目录中的驱动器校准设置。
打开保存到PC目录中的驱动器校准设置。
在命令菜单中输入相关密码,通过Caliper启用本地控制。
2 Caliper数据监视器
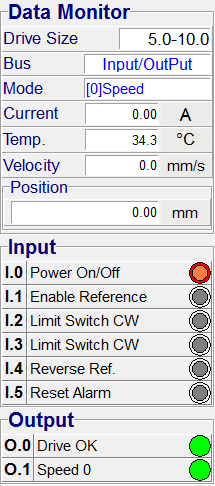
数据监视器显示以下列出的驱动主要参数:
- 驱动器尺寸
- 设置操作模式
- 设置控制拓扑
- 提供给电机的电流(A)
- 驱动散热器温度(°C)
- 转速
- rpm:旋转电机。
- mm/s:线性或管状电机。
- 位置
- 旋转数/每转计数(16位)和总计数(31位+1位用于标志管理):旋转电机。
- mm:线性或管状电机。
- 数字I/O状态
- 数字输入根据Choosen操作模式和Choosen控制拓扑启用。
- 始终启用数字输出
3 Caliper菜单
要修改驱动器参数,请确保: 启用与驱动器的RS232连接:如果缺少连接,可点击驱动器设置键进行参数设置;然后将配置保存到PC目录中,以便在激活RS232连接时将其加载到驱动器内存中。
启用与驱动器的RS232连接:如果缺少连接,可点击驱动器设置键进行参数设置;然后将配置保存到PC目录中,以便在激活RS232连接时将其加载到驱动器内存中。 通过Caliper图标键启用本地控制(仅当在Modbus RTU或Canopen®操作中设置了驱动器时),并确保将驱动器状态设置为关闭(禁用相关图标键)。
通过Caliper图标键启用本地控制(仅当在Modbus RTU或Canopen®操作中设置了驱动器时),并确保将驱动器状态设置为关闭(禁用相关图标键)。
无论何时选择菜单项,所有相关参数都会出现在驱动器数据窗口中:要确认任何修改的参数(并自动发送到驱动器),请按Enter键,或者您可以在命令菜单中启用自动保存功能,将任何修改的参数发送到驱动器;上次修改的参数以蓝色轨道突出显示。
下面列出了菜单项:
1.现场总线(FIELD BUS):运行方式选择。
2.电机数据(MOTOR DATA):电机和反馈参数设置。
3.高级设置(ADVANCED SETUP):调节器、滤波器、限制器设置和报警管理。
4.第四个菜单项取决于所需的操作模式,可在以下位置设置:
控制集(Control Set):I/O操作(或脉冲串)
MODBUS:MODBUS RTU操作。
CANOPEN DS301 e CANOPEN 402:Canopen®操作。
例如,控制设置项进入菜单,其内容在驱动器数据中,并且在I/O操作期间,如下所示: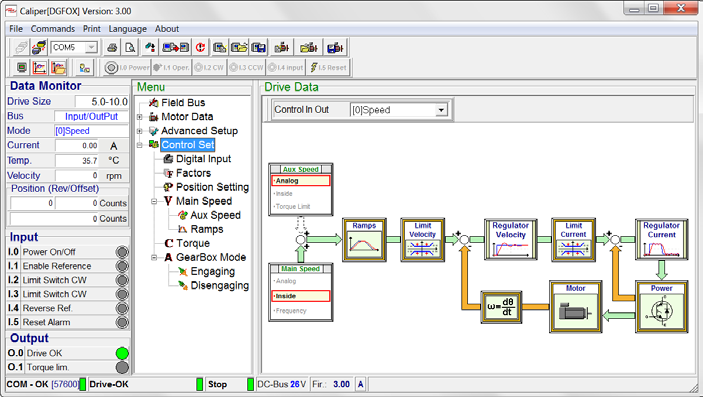
控制集项允许在框图中概述选择的控制类型(参见上图)。每次启用块(斜坡、滤波器和限制器)时,这些块都会出现在块图内的适当位置。
进入驱动器数据窗口,可以选择单个框图,并可以打开一个新窗口,在该窗口中可以设置主要块参数,而无需在高级设置中查找(见下图):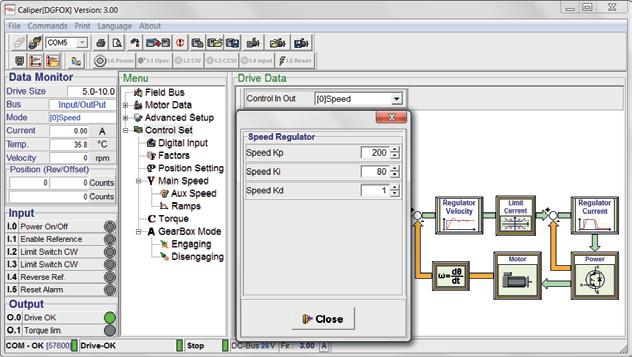
3.1 菜单:‘FIELD BUS’(现场总线)项
‘现场总线’项允许选择所需的操作模式:
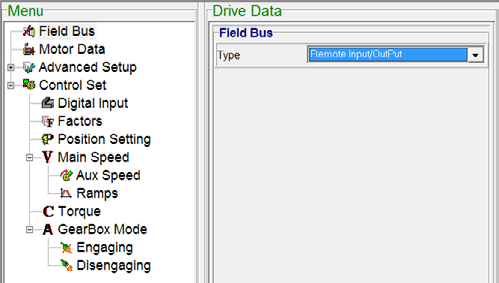
操作模式:I/O(输入/输出)在此操作模式下,菜单中启用控制设置(Control Set)项,可配置模拟/数字输入和所需的控制拓扑。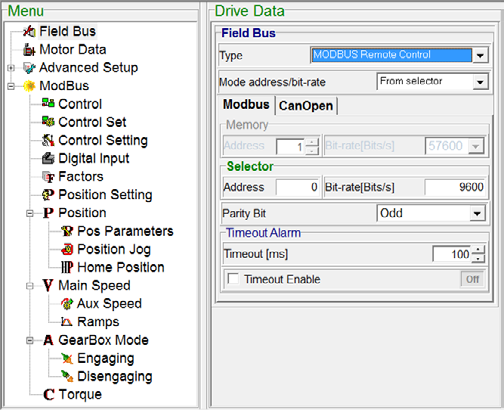
此屏幕允许从Caliper软件或硬件旋转开关(最高15)和DIP开关设置现场总线地址(最高247)和通信波特率(最高57.6KBit)。
在此操作模式下,控制设置项被启用进入菜单,并允许在其他标准Modbus RTU协议参数中配置模拟/数字输入和所需的控制拓扑。
通信超时报警可以配置为在一段时间不活动后报告通信故障。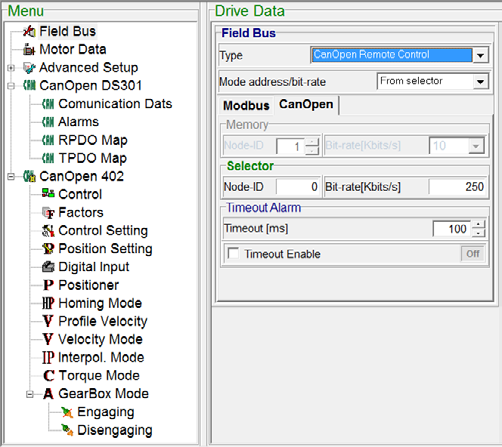
该屏幕允许从Caliper软件或硬件旋转开关(最高15)和DIP开关设置现场总线节点(最高127)和通信波特率(最高1Mbit)。
显示了标准Canopen®DS301 e 402协议。在此操作模式期间,控制设置项目被禁用。但是,作为限位开关的任何数字输入都是启用的,并且与协议并行运行。
通信超时报警可以配置为在一段时间不活动后报告通信故障。
- 只有在变频器处于关闭状态时,才能设置操作模式:
- 在现场总线运行期间,为确保与变频器状态相关的变频器和电机参数可设置,请参阅相关的Modbus RTU和Canopen®用户指南,可从企业网站www.hdtlovato.com下载。
- 在I/O操作期间,只能通过软件Caliper修改参数;在Colorazione Grigia e non saràselezionabile中不能修改参数。
3.2 菜单:‘Engine Data’(电机数据)项
“电机数据”项允许输入参数和连接到驱动器的永磁体电机类型。
I2T电机保护是可设置的,可识别电机过载限制:
- 这是一个时间(可设置为1秒到3000秒。)。在此范围内,驱动器将向电机提供等于额定电流两倍的电流;默认值为120秒。
- 此参数的选择通常与电机物理尺寸有关。
- 如果应力过高,DRIVE将发出适当的报警/警告,并将电机电流限制为等于‘额定电流’参数。
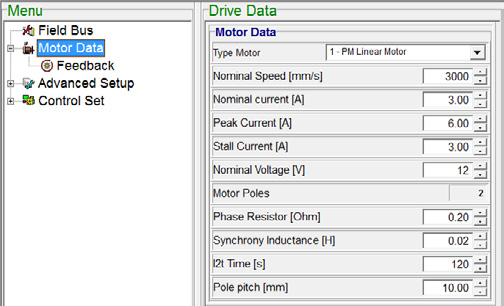
可以从下拉菜单设置电机类型:
- 永磁旋转电机(permanent magnets rotary motor)
- 永磁直线(或管状)电机(permanent magnets linear (or tubular) motor)
- 有刷直流电机(连续电流)(brushed DC motor (continuous current))
然后,根据选定的电机类型,可以设置正确运行所需的所有参数(包括电机I2T保护)。
- 在扭矩控制模式下,从驱动器提供给电机的扭矩百分比指的是称为“额定电流”的参数。
- 考虑到直线或管状电机的最大极数为2,并且必须正确设置极距;可以改为连接最大50极的无刷旋转电机。
- 额定转速参数单位取决于选定的电机类型(旋转式和直线式或管式)。
“Feedback”子菜单项允许选择正确的反馈并启用电机齿槽补偿。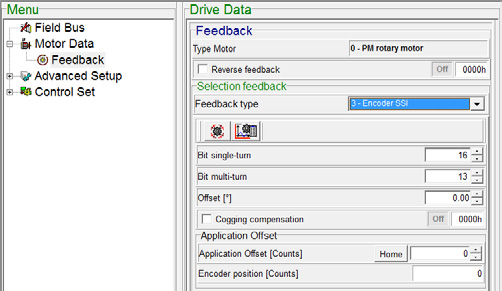
可以从下拉菜单中设置:
- 无霍尔传感器的增量式编码器
- 带霍尔传感器的增量式编码器
- 仅霍尔传感器(梯形控制型)
- SSI编码器:绝对单圈和多圈
然后,根据所选的反馈类型,可以设置对正确操作有用的所有参数(线路驱动器或开路采集器/推挽),并可以反转速度和位置反馈的计数器方向。
- 要设置梯形数字控制(直流无刷电机),请使用“仅限霍尔传感器”反馈。
- 确保在将编码器连接到变频器之前选择正确的反馈Trype。
- 在没有霍尔的增量式情况下,为了对齐磁极,在每次接通命令时,变频器执行或多或少明显的旋转角度,具体取决于该时刻的转子位置。
- 编码器绝对位置显示在变频器数据窗口的子菜单反馈中。
- 如果使用霍尔或SSI绝对编码器进行增量,则必须正确设置偏移参数,执行电机自动同步。
- 如果是SSI绝对式编码器,还需要设置与编码器绝对零位相关的应用偏移量:将电机设置为零应用条件,然后在子菜单反馈的驱动数据窗口中按‘HOME’键,以存储偏移量数据。
- 使用霍尔传感器,图形实时显示与霍尔传感器扇区相关的轴位置。
- 此外,可以连接单圈和多圈分辨率分别高于16位和15位的编码器;如果单圈和多圈位数大于31位,则DRIVE会出错。如果单圈位数高于16位,则驱动器会自动截断多余的位数;顺便说一句,驱动器运行正常,会影响所提供的分辨率,将其限制在16位以内。
3.3 菜单:‘Advanced Setup’(高级设置)项目
“高级设置”项允许设置调节器、滤波器、限制器、报警管理、刹车管理和数字输出,它独立于操作模式选择。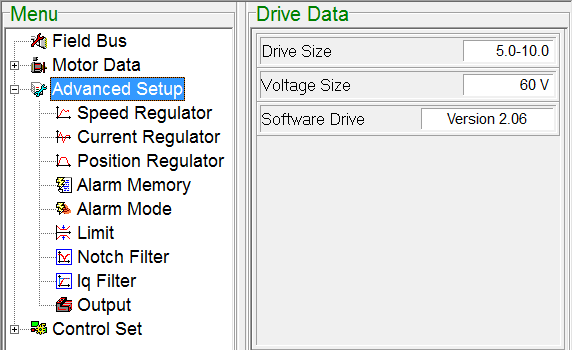
此项显示:
- 固件版本。
- 驱动器规格。
- 驱动额定电压。
该项目允许设置:
- 控制回路增益。
- 带有相关重置管理的警报。
- 过滤器和限制器。
- 数字输出功能。
要设置子菜单中的每一项,只需选中它,修改窗口就会出现在驱动器数据中。高级设置子菜单项如下:
1.调速器(Speed Regulator):PID调速器(从1设置到3000)。值越大,系数Kp、Ki的影响越大。
2.电流调节器(Current Regulator):PID电流调节器(1~2000设置)。值越大,系数Kp、Ki的影响越大。
3.位置注册表-报警(Position Reg. - Alarm):位置调节器(从1设置为4000)。系数K_p值越大,他的效应越大。
4.告警记忆(Alarm Memory):发生告警历史最多16个存储位置,有说明;可擦除告警列表。
5.报警模式(Alarm Mode):包括过压、欠压、驱动I2T等报警管理,可设置如下:·自动复位或存储电压阈值。·I2T报警的额定限流或循环自动复位。
6.限制器(Limit):上限转速和电流限制器,占电机额定电流的百分比(设置为0%~300%)。
7.陷波滤波器(Notch Filter):启用陷波滤波器,并以所需的频率和衰减接合。
8.IQ滤波器(Iq Filter):一阶时间常数滤波器,用于正交基准电流(设置为0.01ms~30ms)。请小心使用此过滤器,否则可能会导致不稳定的情况。
9.输出(Output):OUT1数码输出管理。
驱动位置、速度和加速度基准单位取决于旋转式和直线式或管式之间的电机类型。
3.4 菜单:‘CONTROL SET’‘MODBUS’‘CANOPEN DS301 CANOPEN 402’项目
如上所述,第4菜单项取决于操作模式选择。所选控件类型的驱动参数是可设置的,包括:
1.系数设置(单位和应用类型)
2.模拟和数字输入设置。
3.加速和减速斜坡(仅在速度控制中)。
4.位置参数设置(仅在位置控制或齿轮箱或多定位器中)。
为确保整个应用程序的正确操作,必须执行系数计算程序。此计算是自动的,必须通过Caliper软件启动。
3.4.a 输入/输出操作模式:“控制集”(Control Set)项
- 速度控制。
- 扭矩控制。
- 变速箱控制。
例如,模拟+/-10V输入的速度控制如下所示: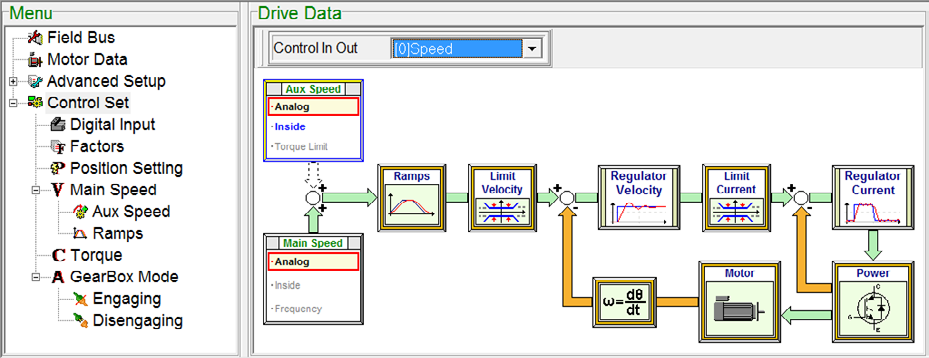
要设置子菜单中的每一项,只需选中它,修改窗口就会出现在驱动器数据(Drive Data)中。
控制集子菜单项如下所示:
1.数字输入(Digital Input):驱动I/O操作模式下的数码输入设置。
2.系数(Factors):与输入基准相关的乘数系数,用于修改刻度分辨率。
3.位置设置(Position Setting):最大允许位置误差和最大允许恢复时间设置;超过这些值,驱动器提供错误/报警条件。
4.主速度(Main Speed):模拟、内部或频率之间的速度控制和主速度基准设置。
- 辅助速度(Aux Speed):模拟、内部或扭矩限制之间的辅助速度参考设置。
- 坡道(Ramps):加速和减速坡道管理;线性坡道或S坡道(JUKK参数)。
5、扭矩:模拟与内部的扭矩控制设置和输入基准设置。
6、变速箱(GearBox):变速箱轴速管理和接合、脱开设置,输入类型可选择:
- 通道A-B:外部主编码器增量通道输入基准。
- 频率。方向:脉冲和方向输入基准。
- CW CCW:CW和CCW输入参考信号。
3.4.b Modbus RTU操作模式:‘Modbus’项
——-不怎么使用此处不再赘述——-3.4.c Canopen®运行模式:“Canopen DS301和Canopen 402”项
- 多位模式控制。
- 速度控制。
- 剖面速度模式控制。
- 扭矩控制。
- 归位模式。
- 插补模式控制。
- 变速箱模式控制。
具有十六进制控制字、状态字和错误代码值的Canopen®协议状态机如下所示:
在现场总线运行期间,软件Caliper在参数本身附近显示每个已实施的Canopen®参数地址(索引和子索引)。
要设置子菜单中的每一项,只需选中它,修改窗口就会出现在驱动器数据(Drive Data)中。
- Canopen DS301子菜单项如下所示:
1.通信数据:保护时间设置和参数保存在EEPROM中(按照Canopen®标准)。
2.告警:告警设置和删除。
3.RPDO图:RPDO图可视化。
4.TPDO图:TPDO图可视化。
- Canopen 402子菜单项如下所示:
1.控制(Control):Canopen®控制字和状态字信息。
2.因子(Factors):与输入参考关联的乘数因子,用于修改刻度分辨率。
3.控制设置(Control Setting):启用运行时的坡道设置、停止命令和报警条件管理。
4.位置设置(Position Setting):最大允许位置误差和最大允许恢复时间设置;超过这些值,驱动器提供错误/报警条件。
5.数字输入(Digital Input):在Modbus RTU操作模式下驱动数字输入设置。
6.定位器(Positioner):坡道拓扑和速度/位置目标设置;定位及其在运行过程中的误差可视化。
- Pos. - Input 1:变频器I/O连接器的Input 1发生事件时,索引停止。
7.归位模式(Homing Mode):归位模式设置,搜索速度为零,使用加速度参数切换搜索速度。
8.剖面速度(Profile Velocity):点对点速度目标设置;带超时的坡道和速度误差窗口;运行时速度可视化。
9.速度模式(Velocity Mode):速度参考和坡道设置;运行中速度可视化。
10.插补模式(Interpol. Mode):插补器模式参数可视化。
11、扭矩模式(Torque Mode):剖面扭矩和扭矩参考设置;运行时扭矩数值可视化。
12、变速箱(GearBox):变速箱轴速管理和接合、脱开设置,输入类型可选择:
- 通道A-B:外部主编码器增量通道输入基准。
- 频率.方向(Freq. Direction):脉冲和方向输入基准。
- CW CCW:CW和CCW输入参考信号。
驱动位置、速度和加速度基准单位取决于旋转式和直线式或管式之间的电机类型。 要让驱动器遵循现场总线参考,必须将其设置为内部(INSIDE)。
 要通过Caliper设置所有Canopen®参数,必须启用“通过Caliper进行本地控制”(Local Controll via Caliper)键。
要通过Caliper设置所有Canopen®参数,必须启用“通过Caliper进行本地控制”(Local Controll via Caliper)键。

若有收获,就点个赞吧
0 人点赞
