硬件型号:CDHD-0062AAF1-RO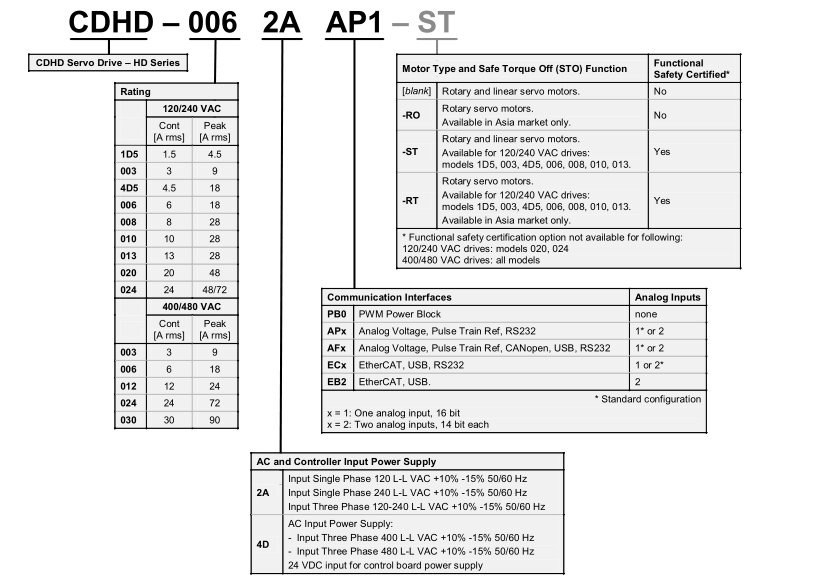
1.机械规格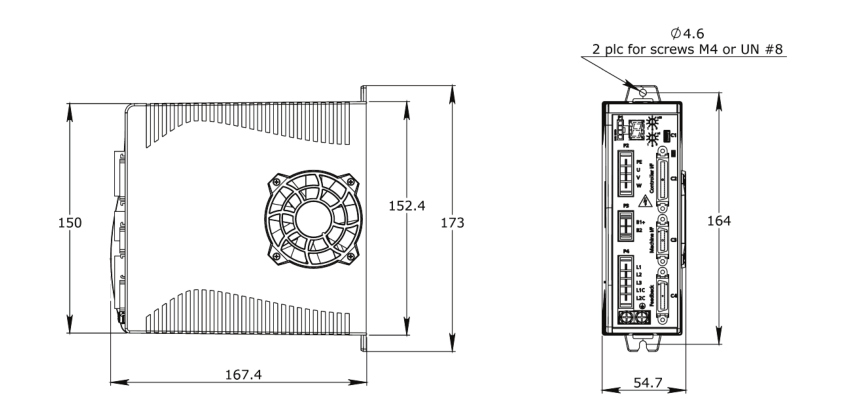
使用CDHD背面的支架,将CDHD安装在接地的导电金属板上。面板必须足够坚固。安装尺寸见图3-1。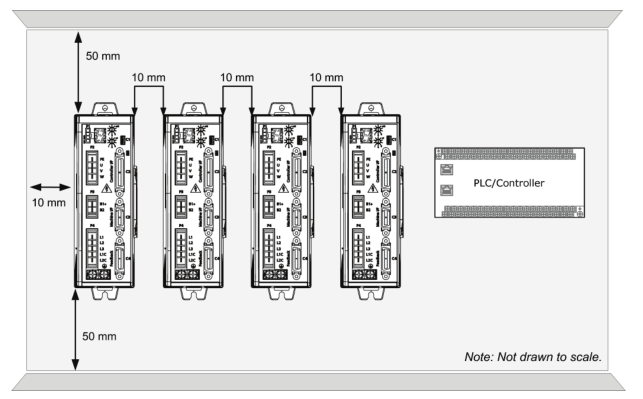
保持盘柜内的环境温度不超过45°C非常重要。如果CDHD设备安装在背板上,还应确保背板温度不超过45°C。建议在机柜底部安装冷却风扇,以实现最佳循环。
2.接口P42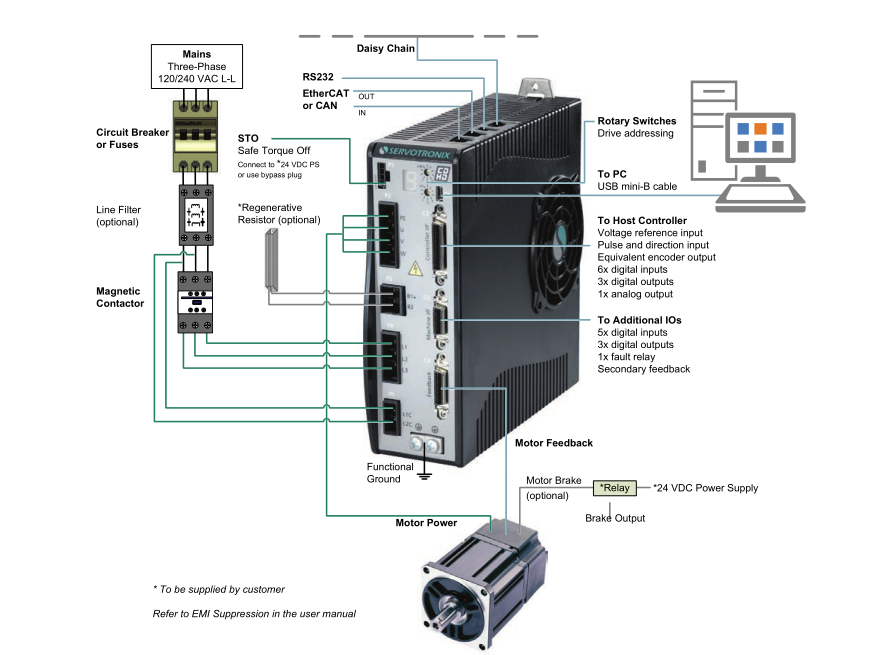
P1接口:Molex接口,安全扭矩关闭
1 24V
2 GND
P2接口:JST J400,电机接口
1 PE 功能接地
2 电机U相
3 电机V相
4 电机W相
P3接口:JST J400,Regeneration接口
1 B1+
2 B2
P5接口:逻辑电源交流输入
1 L1C AC1相
2 L2C AC2相
C1:miniUSB输入
C2:
控制器I/O通过接口C2连接。根据您的应用要求布线数字和模拟输入和输出。未使用的引脚必须保持未接线状态。
要保持数字I/O的隔离,请将24 Vdc电源连接到插脚19。将24 Vdc电源的回路连接到作为输出接地路径的触针1。
24 Vdc电源和回路可以连接在控制器接口(C2)或机器接口(C3)上,但不必同时连接在两者上。
输出是光隔离的,只能作为接收器连接;输出与源输入兼容。
输入只能作为源连接;输入与接收器输出兼容。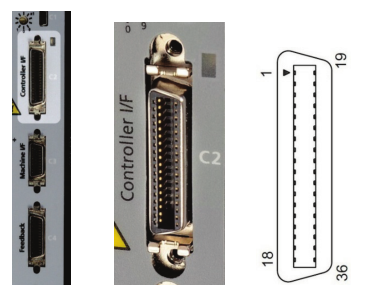
| Pin | 功能 | 介绍 |
|---|---|---|
| 1 | 24伏直流回路 | 返回用户提供的24伏直流电 |
| 2 | 数字输出1 | 光隔离可编程数字输出。使用OUT1读取 |
| 3 | 数字输入1 | 光隔离可编程数字输入。使用IN1阅读 |
| 4 | 等效编码器输出A- | 等效编码器输出信号A的低端(RS422) |
| 5 | 等效编码器输出B- | 等效编码器输出信号B的低端(RS422) |
| 6 | 等效编码器输出Z- | 等效编码器输出指数的低端(RS422) |
| 7 | ||
| 8 | 模拟输入1+ | 差分模拟命令输入的高端(10伏直流) |
| 9 | 方向输入+ | 方向信号的高侧(RS422),或向下计数信号的高侧 |
| 辅助编码器B+ | 次级编码器输入信号B的高侧(RS422) | |
| 10 | GND | Digital ground |
| 11 | 脉冲输入- | 脉冲信号(RS422)的低端,或主编码器信号A的低端,或向上计数信号的低端 |
| 次级编码器A- | 次级编码器输入信号A的低端(RS422) | |
| 12 | ||
| 13 | GND | Digital ground |
| 14 | 数字输入4 | 光隔离可编程数字输入。使用IN4读取 |
| 15 | 数字输入6 | 快速光隔离可编程数字输入。使用IN6读取 |
| 16 | 数字输出3 | 快速光隔离可编程数字输出。使用OUT3读取 |
| 17 | ||
| 18 | 模拟输入2+ | 第二差分模拟输入的高端(10伏直流) |
| 19 | 24伏直流电 | 用户提供的24V,用于输入/输出偏置 |
| 20 | 数字输入2 | 光隔离可编程数字输入。使用IN2阅读 |
| 21 | ||
| 22 | 等效编码器输出A+ | 等效编码器输出信号A的高端(RS422) |
| 23 | 等效编码器输出B+ | 等效编码器输出信号B的高端(RS422) |
| 24 | 等效编码器输出Z+ | 等效编码器输出指数的高端(RS422) |
| 25 | GND | Digital ground |
| 26 | 模拟输入1- | 差分模拟命令输入的低端(10伏直流) |
| 27 | 方向输入- | 方向信号(RS422)的低端,或倒计时信号的低端 |
| 次级编码器B- | 次级编码器输入信号B的低端(RS422) | |
| 28 | 脉冲输入+ | 脉冲信号(RS422)的高端,或主编码器信号A的高端,或向上计数信号的高端 |
| 次级编码器A+ | 辅助编码器输入信号A的高侧(RS422) | |
| 29 | GND | Digital ground |
| 30 | ||
| 31 | 数字输入3 | 光隔离可编程数字输入。使用IN3读取 |
| 32 | 数字输入5 | 快速光隔离可编程数字输入。使用IN5读取 |
| 33 | 数字输出2 | 光隔离可编程数字输出。使用OUT2读取 |
| 34 | ||
| 35 | 模拟输入2- | 第二差分模拟输入的低端(10伏直流) |
| 36 | 模拟输出 | 模拟输出,参考数字地(0-10伏直流) |
C3:
机器I/O通过接口C3连接。根据您的应用要求连接机器输入和输出。未使用的引脚必须保持未接线状态。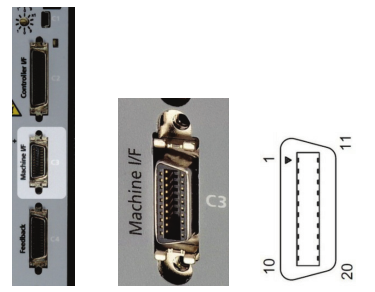
为保持数字I/O的隔离,将24 VDC电源连接到引脚9。将24 VDC电源的回路连接到引脚19,该引脚用作输出的接地路径。
24 VDC电源和回路可以在控制器接口(C2)或机器接口(C3)上连接,但没有必要同时连接到这两个接口。
| Pin | 功能 | 介绍 |
|---|---|---|
| 1 | Secondary encoder A+ | 次级编码器输入信号A的高边(RS422) |
| Pulse input+ | 脉冲信号的高边 | |
| 2 | Secondary encoder B+ | 次级编码器输入信号B的高边(RS422) |
| Direction input+ | 方向信号偏高 | |
| 3 | Secondary encoder Z+ | 辅助编码器输入索引偏高(RS422) |
| 4 | Secondary encoder 5V | 辅助编码器的5 VDC电源 |
| 5 | Digital input 7 | 光隔离可编程数字输入。使用IN7读取 |
| 6 | Digital input 9 | 光隔离可编程数字输入。使用IN9读取 |
| 7 | Digital input 11 | 快速光隔离可编程数字输入。使用IN11读取 |
| 8 | Digital output 5 | 光隔离可编程数字输出。使用OUT5读取 |
| 9 | 24 VDC | 用户提供24V,用于输入/输出偏置 |
| 10 | Fault relay 1 | 干触点故障继电器的端子1 |
| 11 | Secondary encoder A- | 次级编码器输入信号A的低端(RS422) |
| Pulse input- | 脉冲信号的低端 | |
| 12 | Secondary encoder B- | 次级编码器输入信号B的低端(RS422) |
| Direction input- | 方向信号的低端 | |
| 13 | Secondary encoder Z- | 辅助编码器输入索引的低端(RS422) |
| 14 | Secondary encoder ground | 辅助编码器的5伏直流电源接地。 |
| 15 | Digital input 8 | 光隔离可编程数字输入。使用IN8读取 |
| 16 | Digital input 10 | 光隔离可编程数字输入。使用IN10读取 |
| 17 | Digital output 4 | 光隔离可编程数字输出。使用OUT4读取 |
| 18 | Digital output 6 | 快速光隔离可编程数字输出。使用OUT6读取 |
| 19 | 24 VDC return | 返回用户提供的24伏直流电 |
| 20 | Fault relay 2 | 干触点故障继电器的端子2 |
C4:
电机反馈使用C4接口。
根据应用中使用的反馈设备类型,连接电机反馈接口。请参考下面引脚排列表后面的指南。
引脚1、2、14和15具有双重功能。
电机温度传感器的针脚25在驱动器内部连接到CDHD接地。
未使用的引脚必须保持未接线状态。
关于串行通信编码器,如Tamagawa 和 Nikon:
串行编码器数据是双向的。
仅输出串行编码器时钟。
低电压指示直接来自编码器;驱动器无法验证编码器电池电压。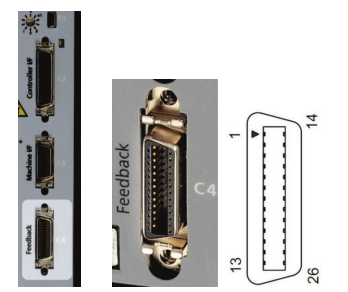
| pin | 功能 | pin | 功能 |
|---|---|---|---|
| 1 | 增量编码器A+ | 14 | 增量编码器A- |
| 串行编码器数据+ | 串行编码器数据- | ||
| 2 | 增量编码器B+ | 15 | 增量编码器B- |
| 串行编码器时钟+ | 串行编码器时钟- | ||
| 3 | 增量编码器Z+ | 16 | 增量编码器Z- |
| 4 | 霍尔U+ | 17 | 霍尔V+ |
| 5 | 霍尔W+ | 18 | - |
| 6 | 旋转变压器正弦+ | 19 | 旋转变压器正弦- |
| 7 | 旋转变压器余弦+ | 20 | 旋转变压器余弦- |
| 8 | 旋转基准+ | 21 | 旋转基准- |
| 9 | 正弦编码器正弦+ | 22 | 正弦编码器正弦- |
| 10 | 正弦编码器余弦+ | 24 | 接地(5V/8V返回) |
| 12 | 电机温度传感器 | 25 | 电机温度传感器 |
| 13 | 5V电源 | 26 | 屏蔽 |
电机反馈接线表P87
C5、C6
接口C5和C6是RJ45端口,用作CAN或以太网上运行的驱动器的发送器(Tx)和接收器(Rx)。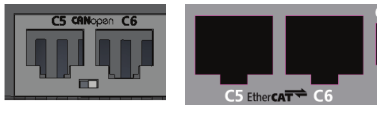
接口C5和C6上的LED指示现场总线状态。请参阅现场总线状态-LED一节。有关在CAN和EtherCAT网络上使用的驱动器的安装、配置和操作的详细信息,请参阅CDHD EtherCAT和CANopen参考手册。可以使用适配器将RJ45端口连接到D9接口。请参阅D9-RJ45适配器一节。
C1、C7:
驱动器可以通过以下接口之一连接到主机:
USB端口。接口标记为C1(例外:AP型号没有USB端口。)。使用USB 2.0 A转Mini-B电缆。
驱动器第一次通过USB端口连接到主机时,Windows可能会检测到该设备并显示找到新硬件向导。
64位版本的Windows需要数字签名的驱动程序。CDHD软件包括一个未签名的USB驱动程序。要安装USB驱动程序,必须首先禁用驱动程序签名验证(示例)。
C8:
CDHD可以在菊花链RS232线路上寻址和控制。在菊花链RS232配置中,所有驱动器必须通过C8连接器以菊花链形式连接。每个驱动器必须具有唯一的地址才能在网络上进行标识。通过设置驱动器上的旋转开关,可以为菊花链驱动器分配从1到99的地址。配置菊花链时,不能使用地址0。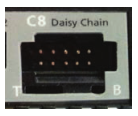
CDHD有两个10位旋转开关,可从设备前面进入。开关用于设置驱动器地址。当菊花链或CanBus网络上有多个驱动器时,每个驱动器必须具有唯一地址才能在网络上进行标识。
使用两个旋转开关设置CAN和串行通信的驱动地址。对于基于以太网的运动总线,交换机没有驱动器或网络的功能用途。它可以在应用程序级别用于标识网络上的特定驱动器。

若有收获,就点个赞吧
0 人点赞
