1 带霍尔传感器的扭矩/速度控制反馈
具有n个极的电机的霍尔效应传感器提供了低分辨率的速度数据,因为电机的单圈被分成3xn个部分。例如,对于6极电机,每转18个位置。从这一前提可以得出,该模式在低速时不能提供良好的性能。它从最高转速的10%开始就有很好的性能,因此,在3000rpm电机的情况下,300rpm以上就有很好的性能。
允许在霍尔传感器反馈的情况下运行:
- 在输入/输出、Modbus RTU和Canopen®三种运行模式中的每一种模式下运行。
- 采用旋转、直线和管状无刷电机以及永磁式连续电流电机。
速度和/或扭矩回路调节器处于活动状态。
在Canopen®模式下,模拟输入被禁用。在I/O和Modbus RTU模式下,模拟输入具有以下功能:
- 对于速度控制,仅主模拟基准就足够了(辅助可以保持不连接)。
- 对于扭矩控制,仅主模拟基准就足够了(辅助可以保持不连接)。
- 对于有扭矩限制的速度控制,需要将主参考转速与辅助转速连接,作为扭矩限制的参考
要启用从霍尔传感器反馈的操作,请在选择适当的电机类型后,在电机数据菜单项中设置相关反馈类型。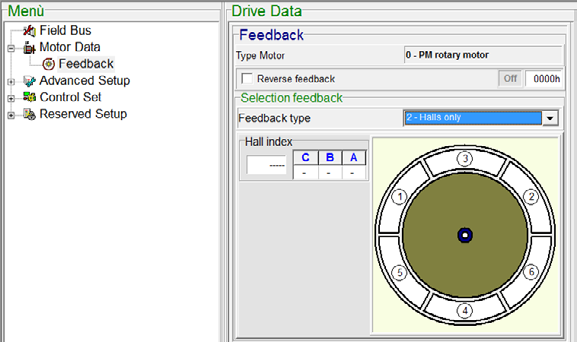
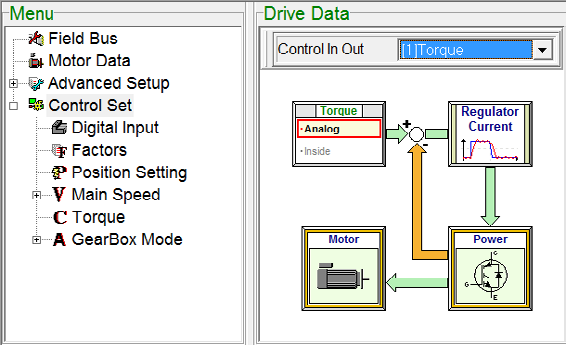
对于控制(扭矩或速度)的选择,将其类型设置为第四个菜单项。下图显示了在输入/输出模式下工作的扭矩控制的设置示例,然后您可以设置:
- 基准类型:输入/输出模式下的模拟模式、现场总线情况下的Modbus RTU模式或内部模式(在图中所示的情况下,扭矩的基准为模拟)。
- 限制器的设置、模拟输入的满刻度和所需设置的PID。
1.1 连接运动控制器-驱动-电机
- J4连接器:
- 为所用电机的编码器提供电源:+5E(针脚7)和GND(针脚8)
- 连接霍尔的三个信号:ha(针脚10)、hb(针脚11)和hc(针脚12)。
- 输入/输出模式的J3连接器,取决于要使用的控件:
- 在差分输入(针脚1和2)或频率参考(针脚12、13、14和15)中提供主速度参考,用于速度控制。
- 为扭矩控制或第二速度参考(针脚3和4)提供辅助参考。
- 连接适当的输入和输出信号。
- 用于现场总线Modbus RTU或CANopen®操作模式的J2和J3连接器:
- 连接现场总线的接线。
- 连接适当的输入和输出信号。
下图中的基本图显示了与电机和外部控制器的驱动器的连接器(由其名称和插脚指示)的连接: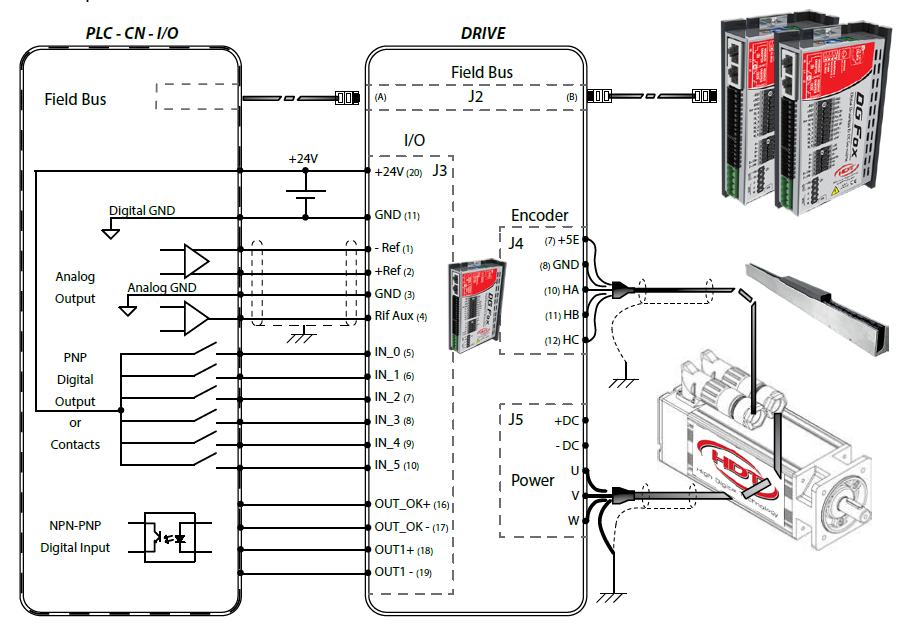
- 连接器J3的针脚3和11的接地连接在驱动器内部。
- 如果外部控制器没有模拟差分输出,而是单输出,则将参考引脚连接至参考接地引脚3;然后跨接驱动器侧或外部控制器侧的连接器。
- 为避免模拟信号产生电磁噪声,请将电缆扭绞,并尽量使信号电缆远离电机的电源接线。
2 扭矩/速度控制,带增量式编码器反馈
在这种模式下,驱动器使用霍尔传感器来检测电机轴的位置和带有2个通道的增量编码器的信号来检测速度。这样即使在低速时也能获得良好的控制,并且速度控制不受系统负载变化的影响。为了在低速下更线性地工作,建议至少有一个编码器,每转1000脉冲或更高。
只有当应用不需要电机制动功能和垂直轴时,才允许增量通道的控制反馈:为了对齐极点,在每次打开命令时,转换器根据转子在该时刻的位置执行或多或少明显的旋转角度。
允许使用霍尔传感器的反馈进行操作:
- 在三种操作模式中的每种模式下:输入/输出、Modbus RTU和Canopen®。
- 带旋转、线性和管状无刷电机和永磁连续电流电机。
速度和/或扭矩回路调节器激活。
在CANopen®模式下,模拟输入被禁用。在I/O和Modbus RTU模式下,模拟输入具有以下功能:
- 对于速度控制,只需主模拟参考即可(辅助设备可以不连接)。
- 对于扭矩控制而言,只有主模拟参考(辅助设备可以不连接)足够。
- 对于带扭矩限制的速度控制,有必要连接主参考转速和辅助转速作为扭矩限制的参考。
要启用增量编码器(或增量编码器+霍尔传感器)的反馈操作,请在选择适当的电机类型后,在电机数据菜单项中设置相关反馈类型。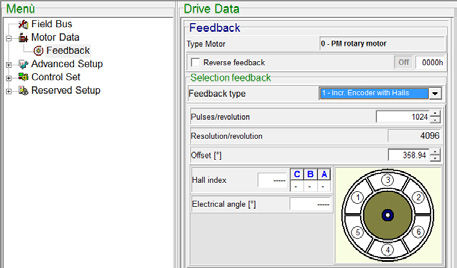
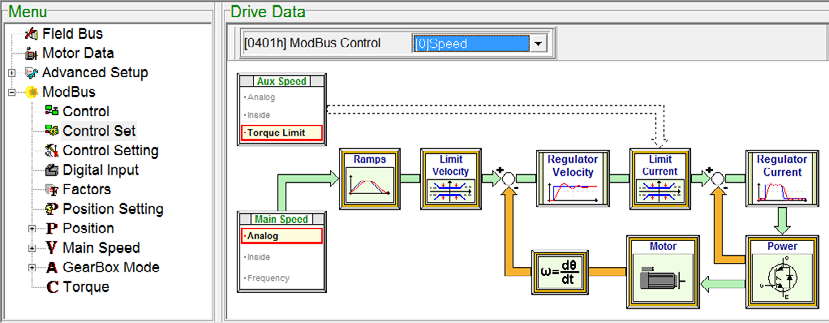
为了选择控件(扭矩或速度),将其类型设置为“第四菜单”项。下图显示了在Modbus RTU模式下工作的带转矩限制的速度控制设置示例,然后可以进行设置:
- 参考类型:在输入/输出模式下为模拟模式,在Modbus RTU模式下或内部模式(在现场总线的情况下)(如图所示,速度和转矩参考是模拟的)。
- 限制器的设置,模拟输入的满量程和所需设置的PID。
2.1 连接运动控制器-驱动-电机
- J4连接器:
- 为使用过的电动机的编码器供电:+ 5E(引脚7)和GND(引脚8)
- 连接三个增量信号:A +(引脚1),A-(引脚2),B + (针脚3),B-(针脚4),Z +(针脚5),Z-(针脚6)。
- 如果也要连接三个HALL信号:HA(引脚10),HB(引脚11)和HC(引脚12)。
- 用于输入/输出模式的J3连接器,取决于要使用的控件:
- 在差动输入(引脚1和2)或频率参考(引脚12、13、14和15)中提供主速度参考。速度控制。
- 为转矩控制或第二速度参考(引脚3和4)提供辅助参考。
- 连接适当的输入和输出信号。
- 用于现场总线Modbus RTU或Canopen®中的工作模式的J2和J3连接器:
- 连接现场总线的接线。
- 连接适当的输入和输出信号。
下图中的基本图显示了与电动机和外部控制器的驱动器连接器的连接(由名称和插脚表示):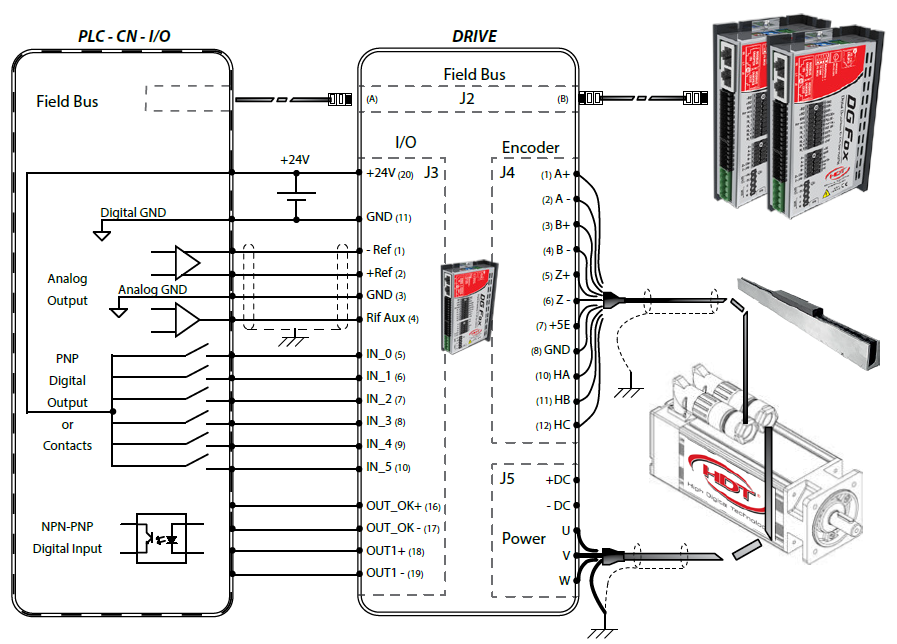
- 连接器J3的引脚3和11的GND连接在驱动器内部。
- 如果外部控制器没有模拟差分输出,而只有一个,则将引脚-Ref连接到基准GND引脚3;然后将跳线连接到驱动器侧面或外部控制器侧面的连接器上。
- 为避免模拟信号产生电磁干扰,请绞合电缆线,并使信号线尽可能远离电机的电源线。
3 扭矩/速度控制,带绝对编码器反馈
驱动器在SSI协议下通过同步串行通讯提供绝对编码器反馈。时钟和数据,用于获得编码器的绝对位置,与差分线驱动器硬件(+ 5V)一起提供。
允许它在霍尔传感器的反馈下运行。
在以下三种运行模式中的每一种下:
- 输入/输出,Modbus RTU和Canopen®。
- 带旋转,线性和管状无刷电机和永磁体连续电流电机。
速度和/或转矩环路调节器处于活动状态。
在Canopen®模式下,模拟输入被禁用。在I / O和Modbus RTU模式下,模拟输入具有以下功能:
- 对于速度控制,仅主要的模拟给定就足够了(辅助设备可以不连接)。
- 对于扭矩控制来说,仅主模拟参考就足够了(辅助未连接)。
- 对于具有转矩限制的速度控制,必须连接主参考速度和辅助信号作为转矩极限的参考。
要使用来自SSI绝对编码器的反馈进行操作,请在选择适当的电动机类型之后,在“电动机数据”菜单项中设置相关的反馈类型。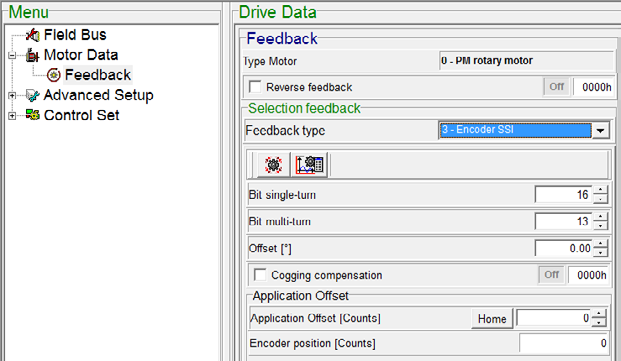
为了选择控件(扭矩或速度),将其类型设置为“第四菜单”项。下图显示了在Modbus RTU模式下工作的带转矩限制的速度控制设置示例,然后可以进行设置:
- 参考类型:在输入/输出模式,Modbus RTU模式或内部模式的情况下为模拟模式如果是现场总线(如图所示,速度和转矩参考是模拟的)。
- 限制器的设置,模拟输入的满量程和所需设置的PID。
3.1 连接运动控制器-驱动-电机
- J4连接器:
- 为使用过的电动机的编码器供电:+ 5E(引脚7)和GND(引脚8)
- 连接绝对编码器时钟和数据信号:CK +(引脚5),CK-(引脚6), D-(针脚9)e D +(针脚10)。
- 以防万一,连接增量信号:A +(引脚1),A-(引脚2),B +(引脚3),B-(引脚4)。
- 用于输入/输出模式的J3连接器,取决于要使用的控件:
- 在差动输入(引脚1和2)或频率参考(引脚12、13、14和15)中提供主速度参考。速度控制。
- 为转矩控制或第二速度参考(引脚3和4)提供辅助参考。
- 连接适当的输入和输出信号。
- 用于现场总线Modbus RTU或Canopen®中的工作模式的J2和J3连接器:
- 连接现场总线的接线。
- 连接适当的输入和输出信号。
下图中的基本图显示了与电动机和外部控制器的驱动器连接器的连接(由名称和插脚表示):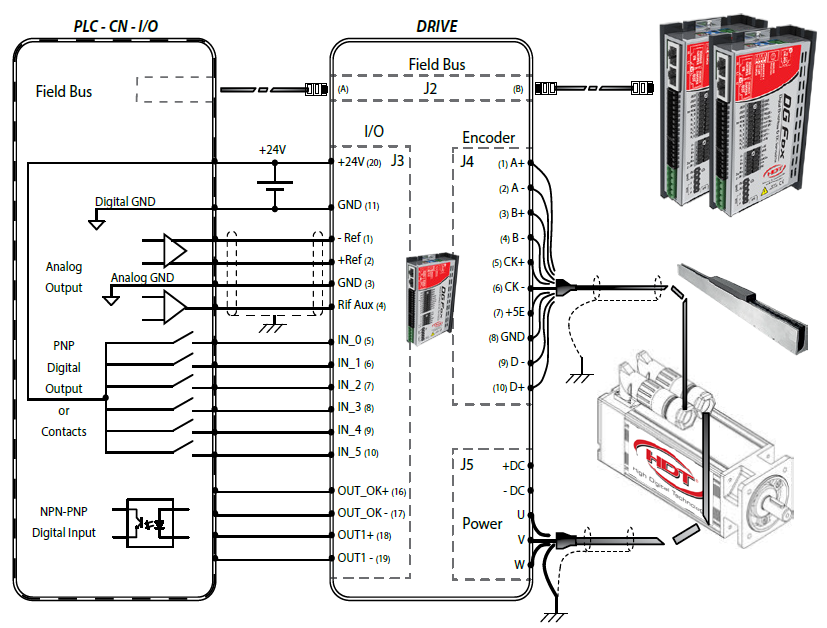
连接器J3的引脚3和11的GND连接在驱动器内部。 如果外部控制器没有模拟差分输出,而只有一个,则将引脚-Ref连接到基准GND引脚3;然后将跳线连接到驱动器侧面或外部控制器侧面的连接器上。 为避免模拟信号产生电磁干扰,请绞合电缆线,并使信号线尽可能远离电机的电源线。
4 位置控制(变速箱或脉冲模式)
在位置控制期间,驱动器使用两个信号,或者在现场总线操作中或在I / O操作中;在I / O操作中,segnal可以获得以下功能之一:
1.脉冲-方向(PULSE - DIRECTION)
2.外部编码器CHA-CHB
3. CW-CCW
建议为驱动器提供每转一个大于或等于1024的脉冲数。较低的脉冲数可能会导致不规则的旋转,特别是在低RPM的情况下。此外,建议设置以下一项反馈:
- 增量通道和HALL传感器。
- 绝对编码器。
- 如有必要,仅增量编码器;不建议仅使用HALL传感器,因为它在位置控制方面不能提供良好的性能。
允许它在霍尔传感器的反馈下运行:
- 在以下三种运行模式中的每一种下:输入/输出,Modbus RTU和Canopen®。
- 带有旋转,线性和管状无刷电机以及永磁体连续电流电机。
速度和/或扭矩和位置回路调节器处于活动状态。
例如,要启用来自SSI绝对编码器反馈的操作,请在选择适当的电动机类型之后,在“电动机数据”菜单项中设置相关的反馈类型。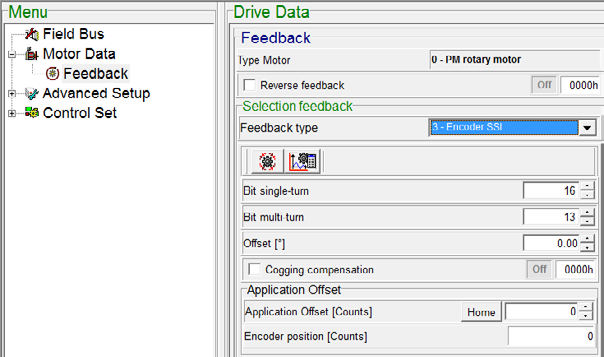
为了选择位置控制,将其类型设置为第四菜单项(电轴)。下图显示了I / O设置的示例,然后可以进行设置:
- 轴比:分子(NUM)和分母(DEN)。
- 主设备脉冲数(PULSEmaster):它向从设备提供有关主设备脉冲数的信息。
- 所需的调节PID设置和限制器设置。
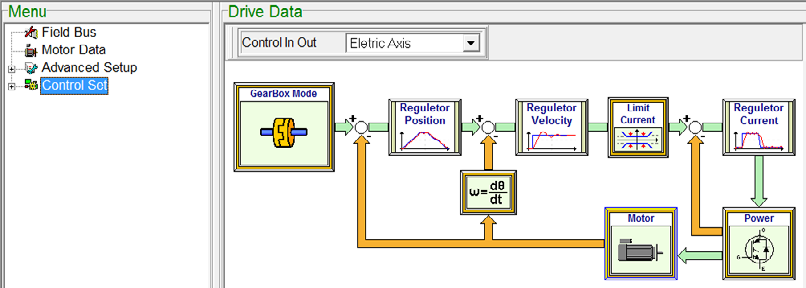
因此,从设备根据接收到的频率信号执行的每转次数,如下公式所示:
从驱动器读取的脉冲数之间的比率(PULSE_input)和设置的主脉冲数(PULSE_master)提供有关主设备轴位置的信息,而NUM和DEN之间的比率则提供有关百分比轴位置的信息,反之亦然位置依次。
4.1 连接运动控制器-驱动-电机
- J4连接器:
- 为所用电机的编码器供电:+ 5E(引脚7)和GND(引脚8)
- 如果使用增量编码器,请最终连接三个增量信号和HALL传感器:A +(引脚1),A-(引脚2),B +(引脚3),B-(引脚4),Z +(引脚5),Z-(引脚6),HA(引脚10),HB(引脚11)和HC(针12)。
- 如果使用绝对编码器,请连接CK +(引脚5),CK-(引脚6),D-(引脚9)和D +(引脚10),最后连接两个增量通道A +(引脚1),A-(接脚2),B +(接脚3)和B-(接脚4)。
- 用于输入/输出模式的J3连接器,取决于要使用的控件:
- 分别连接引脚12-13和14-15:方向参考或外部编码器CHA信号或CCW信号以及脉冲参考或外部编码器CHB信号或连续波信号。
- 连接适当的输入和输出信号。
- 用于现场总线Modbus RTU或Canopen®中的工作模式的J2和J3连接器:
- 连接现场总线的接线。
- 连接适当的输入和输出信号。
下图中的基本图显示了与电动机和外部控制器的驱动器连接器的连接(由名称和插脚表示):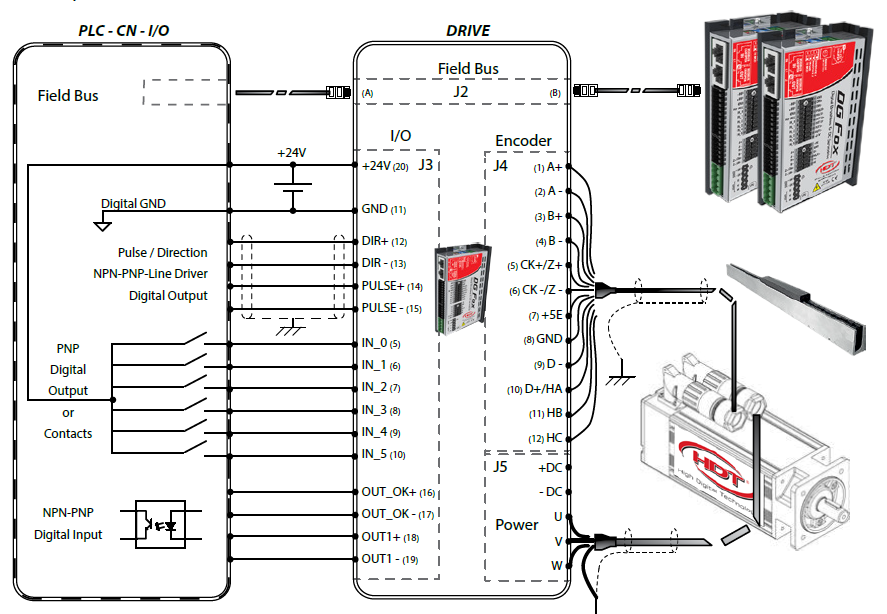
- 连接器J3的引脚3和11的GND连接在驱动器内部。
- 为避免模拟信号产生电磁干扰,请绞合电缆线,并使信号线尽可能远离电机的电源线。
5 闭环调节调节
调整过程对于获得整个受控系统的稳定性和性能至关重要。执行控制的驱动器具有用于电流回路和速度回路的PID控制器。要执行调整,请使用Caliper软件并在操作过程中观察示波器的一些变量。如果满足以下条件,则在大多数类型的受控系统中,以下调整过程均会产生良好的效果:
- 驱动器必须能够提供电动机的额定电流。
- 负载惯量是电机最大的6倍。
5.1 电流回路调节
如果驱动器控制H.D.T.电机,最佳PID电流调节器设置存储在电机配置文件中的目录中,以将数据保存到使用的PC中。建议在PID电流调整之前和之后执行电机自动定相。
为了执行PID电流调整,负载保持与电动机的连接并不是必需的。
整定之前,如果无法从电动机上断开负载,为了保持安全状态,请执行以下操作:
1.停止并制动电动机:在PID电流整定期间,此安全操作是必需的,因为将禁用转矩(基本操作)如果是悬挂的货物)。
在垂直轴负载的情况下,请使用适当的机械制动器。
2.仅适用于3.01以上版本的FW,在编码器偏移数据中执行相移:仅在增量式编码器和HALL传感器或绝对编码器的情况下,此操作允许为不向电动机传递扭矩的电动机提供电流参考。加载。要使编码器去相位,请在“电机数据”菜单项中选择“数据集II”图标,然后按提示显示“偏移”,向“偏移”数据添加或减去90°角。
请启用霍尔传感器。建议为驱动器和电机参数执行备份文件。
下图显示了如何使编码器偏移移相: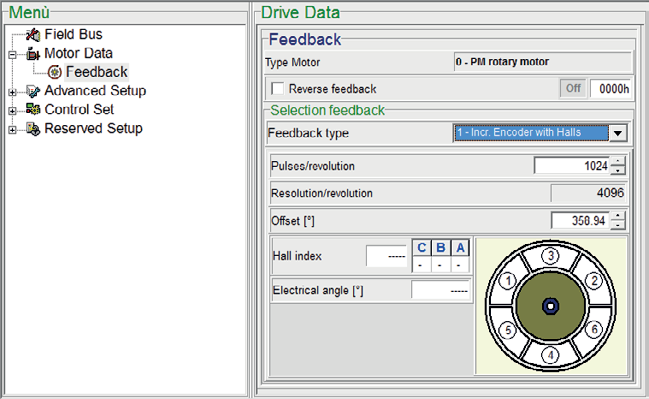
要执行调谐,请执行以下操作:
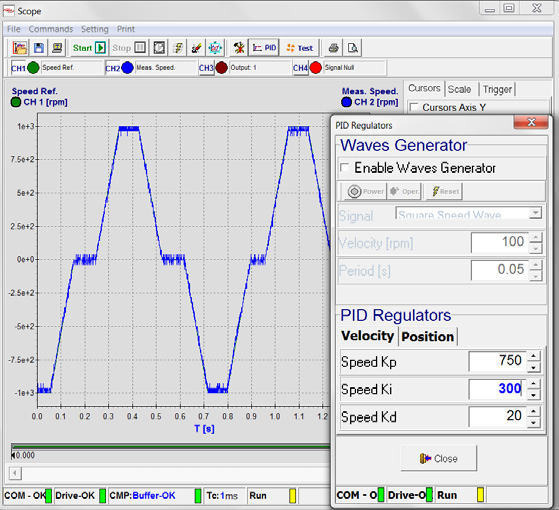
1.生成方波电流参考:在Caliper软件中使用“波形发生器”功能创建所需的参考。提供以额定电动机电流幅度和周期在0.05秒至0.1秒之间设置的基准来驱动参考。
在此操作中,驱动器会提供电动机的额定电流,因此电动机可能会达到较高的外壳温度。
PID电流设置:要设置的参数为KP、 KI
- 设置KI = 1:积分作用被消除。
- 逐渐增加Kp直到出现电流共振:在这种情况下,示波器的可视化中会出现明显的电流共振(此外,这种情况会导致电机产生异常噪音)。
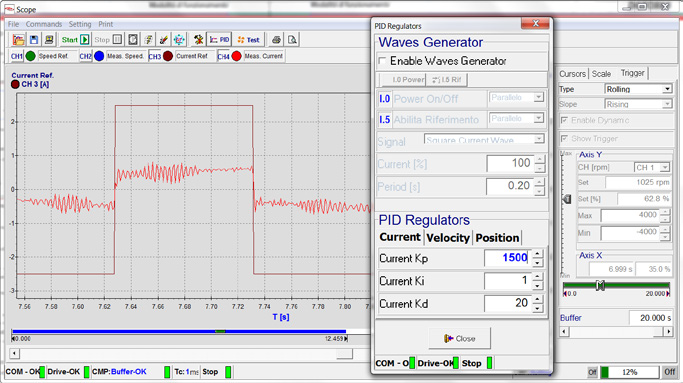
- 将KP值减半:将KP减半,系统可避免在瞬态条件下产生振荡。
- 逐渐增加KI:增加直到故障电流变量准确地遵循所需的电流参考。在任何情况下,KI参数均不得大于先前设置的KP的60%。
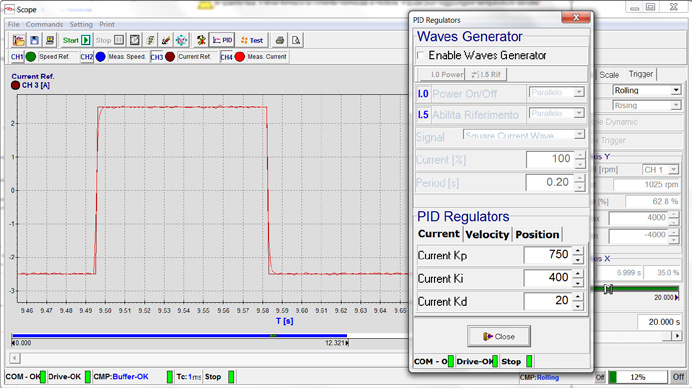
在PID电流调整结束时,请执行“电机自动定相”。
- KP和KI最佳值可能会因应用程序而有很大差异。
- 在大惯量系统中,任何低于最大设定值(2000)的KP值都可能不会发生共振。在这种情况下,请将KP设置为1000,然后增加KI,直到误用的电流变量准确地遵循所需的参考电流为止:以200为步数重复整个操作以擦除KI并增加KP。
- 在任何情况下,建议将KP设置为≤1800。
5.2 速度回路调节
速度环调整必须在连接负载的情况下进行,因为时间常数取决于要控制的动态系统。
必须在电流回路调整和执行步骤相似之后执行速度回路调整。
建议在速度环调整之前执行电机自动定相。
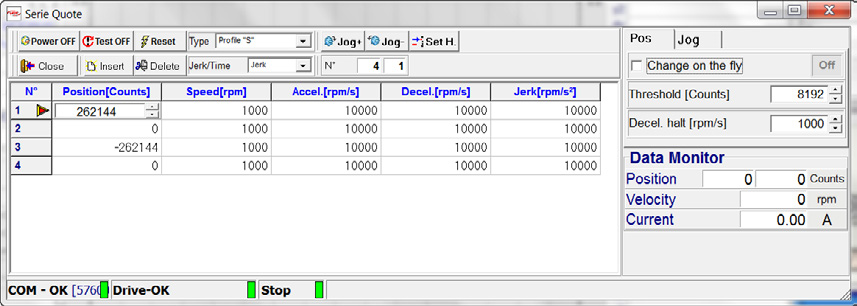
要进行调谐,请执行以下操作:
1.生成适当的循环目标位置:在Caliper软件中使用“ TEST”功能创建所需的参考。根据系统动态,使用适当的加减速参数设置目标位置,如下图所示:
在这种情况下,驱动器遵循带有斜坡参数的速度和循环位置参考:请在运行期间注意负载。
2. PID速度设置:要设置的参数为KP e il KI。
- 设置KI = 0:清除积分作用。
- 逐渐增加KP直到出现速度共振:在这种情况下,示波器的可视化中会出现明显的速度误差和共振(此外,这种情况会导致电机产生异常噪音)。
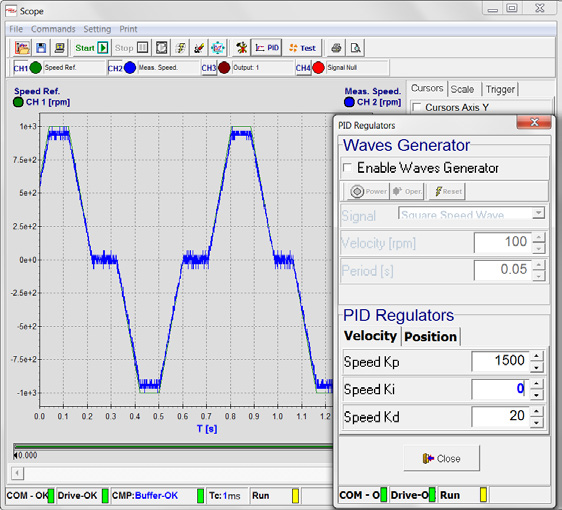
- 将KP值减半:将KP减半,系统可以避免在瞬态条件下产生振荡。
- 逐渐增加KI:增加直到测量的速度变量准确地遵循所需的速度参考值。在任何情况下,KI参数均不得大于先前设置的KP的40%。
在观察与参考变化相对应的负载行为时,请保持波形响应尽可能无过冲(低增益设置),但也要保证足够的性能(高增益设置)。因此,调整始终是稳定性和性能之间折衷的结果。下图显示了光纤闭环系统的典型步骤(图下部的图像中的电流环和图上方的图像中的速度)。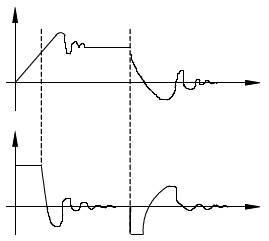
- 阶跃响应具有低比例增益:速度调节器提供的内部电流给定值太慢,并导致在稳定状态给定值附近出现过冲。请注意,与电流参考值变化(轴的原点)相对应,电流环正确响应而不会出现过冲。那么问题就出在速度控制增益上。
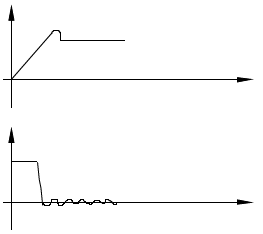
- 阶跃响应具有可接受的比例增益:电流基准足够快,速度阶跃响应仅显示一个过冲。在这些情况下,积分增益过高可能会导致更多速度超调。
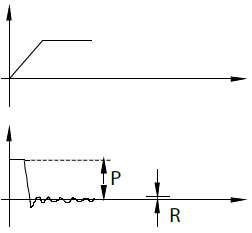
- 具有最佳增益的阶跃响应:这种情况导致获得系统的性能和稳定性。建议噪声幅度R低于峰值驱动电流值的15%。

若有收获,就点个赞吧
0 人点赞
