2.12.1巡线传感器语句
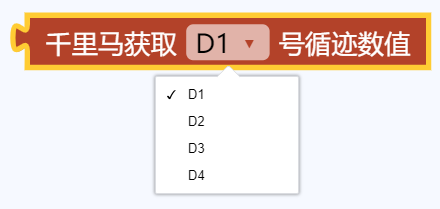 |
获取指定巡线传感器的巡线值,返回的是数值,范围0-255 |
|---|---|
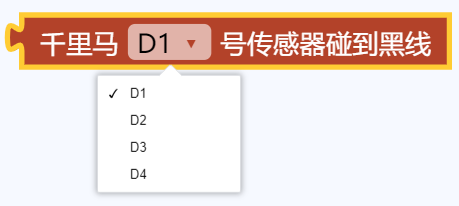 |
判断指定巡线传感器是否碰到黑线,碰到黑线,返回“Ture”,否则返回“False” |
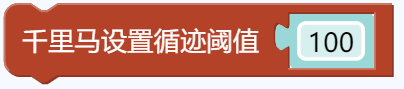 |
设置识别到白线的阈值,范围是0-255,默认是100,与上一条语句共同使用,若阈值为100,使用上一条语句时,若巡线值小于100,默认碰到白线,100以上,则碰到黑线。 |
2.12.2程序语句应用
千里马Plus底部朝上,从右至至左,分别为D1、D2、D3、D4号。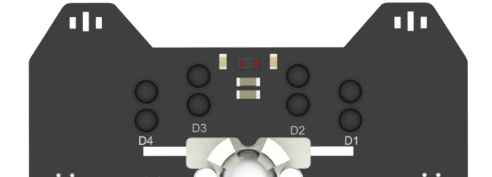
1.案例:让千里马Plus进行简单的巡线,如果D2号传感器碰到黑线,千里马Plus向左偏移,如果D3号传感器碰到黑线,千里马Plus向右偏移,如果都没碰到,直行,如果都碰到了,则停止。
2.巡线值是多少,要根据实际情况进行调整,所以需要显示巡线值,方便获取数据,及时调整。程序如下: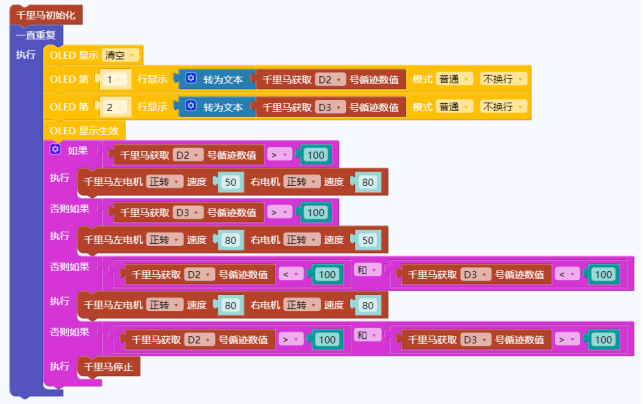
也可以设置阈值,判断是否碰到黑线,程序如下:

若有收获,就点个赞吧
0 人点赞
