第七章 中断处理
中断处理一般不是纯软件来实现的,需要硬件的支持。通过对中断的学习有助于更深入的了解系统的一些底层原理,特别是驱动程序的开发。
1 什么是中断
为了提高 CPU 和外围硬件 (硬盘,键盘,鼠标等等) 之间协同工作的性能,引入了中断的机制。
没有中断的话,CPU 和外围设备之间协同工作可能只有轮询这个方法:CPU 定期检查硬件状态,需要处理时就处理,否则就跳过。当硬件忙碌的时候,CPU 很可能会做许多无用功(每次轮询都是跳过不处理)。
中断机制是硬件在需要的时候向 CPU 发出信号,CPU 暂时停止正在进行的工作,来处理硬件请求的一种机制。
2 中断类型
中断一般分为异步中断 (一般由硬件引起) 和同步中断(一般由处理器本身引起)。
异步中断:CPU 处理中断的时间过长,所以先将硬件复位,使硬件可以继续自己的工作,然后在适当时候处理中断请求中耗时的部分。这样做避免了处理数据包时间过长导致网卡接收数据包速度变慢。
举个例子:网卡的工作原理
- 网卡收到数据包后,向 CPU 发出中断信号,请求处理接收到的数据包
- CPU 将收到的数据包拷贝到内存后,即通知网卡继续工作
- 至于数据包拷贝至内存后的处理会在适当的时候进行
同步中断:CPU 处理完中断请求的所有工作后才反馈硬件
举个例子:系统异常处理 (比如运算中的除 0 操作)
- 应用程序出现异常后,需要内核来处理
- 内核调用相应的异常处理函数来处理异常
- 处理完后终了应用程序或者给出 message
3 中断相关函数
实现一个中断,主要需要知道 3 个函数:
- 注册中断的函数
- 释放中断的函数
- 中断处理程序的声明
3.1 注册中断的函数
位置:linux/interrupt.h
定义如下:
/** irg - 表示要分配的中断号* handler - 实际的中断处理程序* flags - 标志位,表示此中断的具有特性* name - 中断设备名称的ASCII 表示,这些会被/proc/irq和/proc/interrupts文件使用* dev - 用于共享中断线,多个中断程序共享一个中断线时(共用一个中断号),依靠dev来区别各个中断程序* 返回值:* 执行成功:0* 执行失败:非0*/int request_irq(unsigned int irq,irq_handler_t handler,unsigned long flags,const char* name,void *dev);//此函数与request_irq()的区别是devm_开头的API申请的是内核 "managed"的资源//一般不需要在出错处理和remove()接口里再显式的释放,类似于自动回收机制int devm_request_irq(struct device *dev, unsigned int irq, irq_handler_t handler,unsigned long irqflags, const char *devname, void *dev_id);
除了可以通过request_irq() 、devm_request_irq()申请中断以外,还可以通过request_threaded_irq()和devm_request_threaded_irq()申请。 这两个函数的原型为
//使用这两个函数注册中断时,内核会为相应的中断号分配一个对应的内核线程,thread_fn对应的函数会在新线程//中执行,可以在这个线程中执行中断后半部的操作int request_threaded_irq(unsigned int irq, irq_handler_t handler, irq_handler_t thread_fn,unsigned long flags, const char *name, void *dev);int devm_request_threaded_irq(struct device *dev, unsigned int irq,irq_handler_t handler, irq_handler_t thread_fn,unsigned long irqflags, const char *devname,void *dev_id);
3.2 释放中断的函数
定义比较简单:void free_irq(unsigned int irq, void *dev)
如果不是共享中断线,则直接删除 irq 对应的中断线。
如果是共享中断线,则判断此中断处理程序是否中断线上的最后一个中断处理程序,
- 是最后一个中断处理程序 -> 删除中断线和中断处理程序
- 不是最后一个中断处理程序 -> 删除中断处理程序
3.3 中断处理函数声明
声明格式如下:
/** 中断处理程序的声明* @irp - 中断处理程序(即request_irq()中handler)关联的中断号* @dev - 与 request_irq()中的dev一样,表示一个设备的结构体* 返回值:* irqreturn_t - 执行成功:IRQ_HANDLED 执行失败:IRQ_NONE*/static irqreturn_t intr_handler(int, irq, void *dev)
3.4 中断控制函数
常用的中断控制方法见下表,local开头的表示作用范围为本CPU(注意多核):
| 函数 | 说明 |
|---|---|
| local_irq_disable() | 禁止本地中断传递 |
| local_irq_enable() | 激活本地中断传递 |
| local_irq_save() | 保存本地中断传递的当前状态,然后禁止本地中断传递 |
| local_irq_restore() | 恢复本地中断传递到给定的状态 |
| disable_irq() | 禁止给定中断线,并确保该函数返回之前在该中断线上没有处理程序在运行 |
| disable_irq_nosync() | 禁止给定中断线 |
| enable_irq() | 激活给定中断线 |
| irqs_disabled() | 如果本地中断传递被禁止,则返回非 0;否则返回 0 |
| in_interrupt() | 如果在中断上下文中,则返回非 0;如果在进程上下文中,则返回 0 |
| in_irq() | 如果当前正在执行中断处理程序,则返回非 0;否则返回 0 |
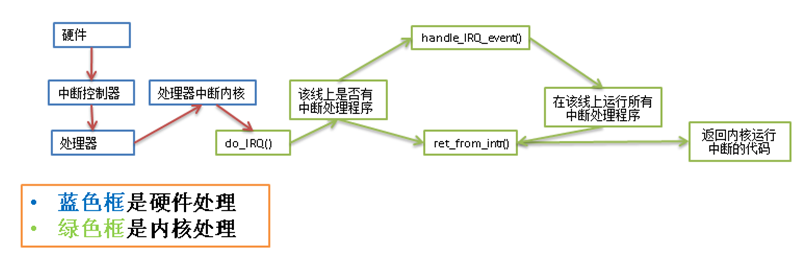
4. 中断处理机制
中断处理的过程主要涉及 3 函数:
- do_IRQ 与体系结构有关,对所接收的中断进行应答
- handle_IRQ_event 调用中断线上所有中断处理
- ret_from_intr 恢复寄存器,将内核恢复到中断前的状态
处理流程可以参见书中的图,如下:
总结
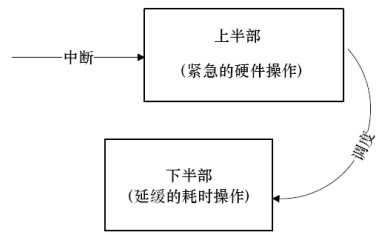
中断处理对处理时间的要求很高,如果一个中断要花费较长时间,那么中断处理一般分为 2 部分。
- 上半部只做一些必要的工作后,立即通知硬件继续自己的工作。
- 中断处理中耗时的部分,也就是下半部的工作,CPU 会在适当的时候去完成:
第8章 中断下半部处理
1 中断下半部处理
那么对于一个中断,如何划分上下两部分呢?哪些处理放在上半部,哪些处理放在下半部?这里有一些经验可供借鉴:
- 如果一个任务对时间十分敏感,将其放在上半部
- 如果一个任务和硬件有关,将其放在上半部
- 如果一个任务要保证不被其他中断打断,将其放在上半部
- 其他所有任务,考虑放在下半部
2 实现中断下半部的机制
实现下半部的方法很多,随着内核的发展,产生了一些新的方法,也淘汰了一些旧方法。目前使用最多的是以下 3 中方法
- 2.1 软中断
- 2.2 tasklet
- 2.3 工作队列
- 线程化irq
2.1 软中断
软中断的代码在:kernel/softirq.c
软中断的流程如下:
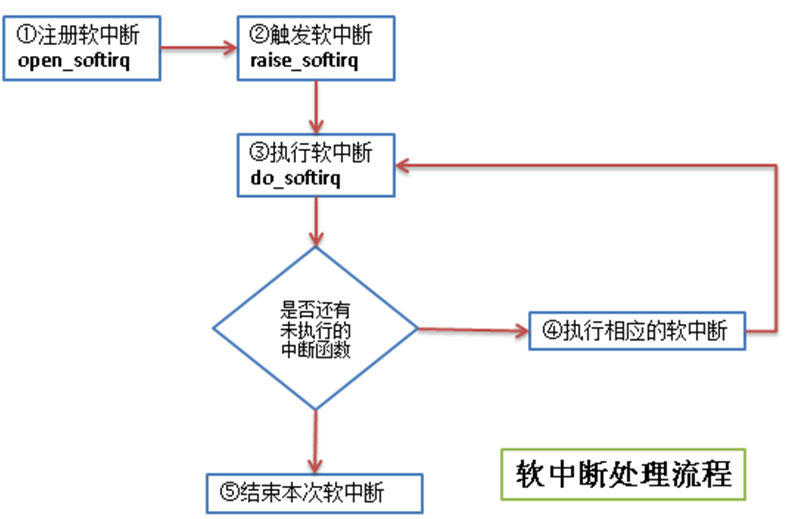
流程图中几个步骤的说明:
- ① 注册软中断的函数 open_softirq 参见 kernel/softirq.c 文件)
/** 将软中断类型和软中断处理函数加入到软中断序列中* @nr - 软中断类型* @(*action)(struct softirq_action *) - 软中断处理的函数指针*/void open_softirq(int nr, void (*action)(struct softirq_action *)){/* softirq_vec是个struct softirq_action类型的数组 */softirq_vec[nr].action = action;}
软中断类型目前有 10 个,其定义在 include/linux/interrupt.h 文件中:
enum{HI_SOFTIRQ=0,TIMER_SOFTIRQ,NET_TX_SOFTIRQ,NET_RX_SOFTIRQ,BLOCK_SOFTIRQ,BLOCK_IOPOLL_SOFTIRQ,TASKLET_SOFTIRQ,SCHED_SOFTIRQ,HRTIMER_SOFTIRQ,RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */NR_SOFTIRQS};
struct softirq_action 的定义也在 include/linux/interrupt.h 文件中
/** 这个结构体的字段是个函数指针,字段名称是action* 函数指针的返回指是void型* 函数指针的参数是 struct softirq_action 的地址,其实就是指向 softirq_vec 中的某一项* 如果 open_softirq 是这样调用的: open_softirq(NET_TX_SOFTIRQ, my_tx_action);* 那么 my_tx_action 的参数就是 softirq_vec[NET_TX_SOFTIRQ]的地址*/struct softirq_action{void (*action)(struct softirq_action *);};
② 触发软中断的函数 raise_softirq 参见 kernel/softirq.c 文件
/** 触发某个中断类型的软中断* @nr - 被触发的中断类型* 从函数中可以看出,在处理软中断前后有保存和恢复寄存器的操作*/void raise_softirq(unsigned int nr){unsigned long flags;local_irq_save(flags);raise_softirq_irqoff(nr);local_irq_restore(flags);}
③ 执行软中断 do_softirq 参见 kernel/softirq.c 文件
asmlinkage void do_softirq(void){__u32 pending;unsigned long flags;/* 判断是否在中断处理中,如果正在中断处理,就直接返回 */if (in_interrupt())return;/* 保存当前寄存器的值 */local_irq_save(flags);/* 取得当前已注册软中断的位图 */pending = local_softirq_pending();/* 循环处理所有已注册的软中断 */if (pending)__do_softirq();/* 恢复寄存器的值到中断处理前 */local_irq_restore(flags);}
④ 执行相应的软中断 - 执行自己写的中断处理
linux 中,执行软中断有专门的内核线程,每个处理器对应一个线程,名称 ksoftirqd/n (n 对应处理器号)
通过 top 命令查看我的单核虚拟机,CentOS 系统中的 ksoftirqd 线程如下:
[root@vbox ~] top | grep ksoftirq4 root 20 0 0 0 0 S 0.0 0.0 0:00.02 ksoftirqd/0
2.2 tasklet
tasklet 也是利用软中断来实现的,但是它提供了比软中断更好用的接口 (其实就是基于软中断又封装了一下),所以除了对性能要求特别高的情况,一般建议使用 tasklet 来实现自己的中断。
tasklet 对应的结构体在 <linux/interrupt.h> 中
struct tasklet_struct{struct tasklet_struct *next; /* 链表中的下一个tasklet */unsigned long state; /* tasklet状态 */atomic_t count; /* 引用计数器 */void (*func)(unsigned long); /* tasklet处理函数 */unsigned long data; /* tasklet处理函数的参数 */};
tasklet 状态只有 3 种值:
- 值 0: 表示该 tasklet 没有被调度
- 值 TASKLET_STATE_SCHED: 表示该 tasklet 已经被调度
- 值 TASKLET_STATE_RUN: 表示该 tasklet 已经运行
引用计数器 count 的值不为 0,表示该 tasklet 被禁止。
tasklet 使用流程如下:
- 声明 tasklet (参见 < linux/interrupt.h>)
```c
/ 静态声明一个tasklet /
define DECLARE_TASKLET(name, func, data)
struct tasklet_struct name = { NULL, 0, ATOMIC_INIT(0), func, data }
define DECLARE_TASKLET_DISABLED(name, func, data)
struct tasklet_struct name = { NULL, 0, ATOMIC_INIT(1), func, data }
/ 动态声明一个tasklet 传递一个tasklet_struct指针给初始化函数 / extern void tasklet_init(struct tasklet_struct t, void (func)(unsigned long), unsigned long data);
- 编写处理程序<br />参照 tasklet 处理函数的原型来写自己的处理逻辑: `void tasklet_handler(unsigned long date)`- 调度 tasklet<br />中断的上半部处理完后调度 tasklet,在适当时候进行下半部的处理: `tasklet_schedule(&my_tasklet) /* my_tasklet就是之前声明的tasklet_struct */`<a name="9344c563"></a>### 2.3 工作队列工作队列子系统是一个用于创建内核线程的接口,通过它可以创建一个工作者线程来专门处理中断的下半部工作。**工作队列和 tasklet 不一样,不是基于软中断来实现的。**<br />缺省的工作者线程名称是 events/n (n 对应处理器号)。通过 top 命令查看我的单核虚拟机,CentOS 系统中的 events 线程如下:```bash[root@vbox ~] top | grep event7 root 20 0 0 0 0 S 0.0 0.0 0:03.71 events/0
工作队列主要用到下面 3 个结构体,弄懂了这 3 个结构体的关系,也就知道工作队列的处理流程了。
/* 在 include/linux/workqueue.h 文件中定义 */struct work_struct {atomic_long_t data; /* 这个并不是处理函数的参数,而是表示此work是否pending等状态的flag */#define WORK_STRUCT_PENDING 0 /* T if work item pending execution */#define WORK_STRUCT_FLAG_MASK (3UL)#define WORK_STRUCT_WQ_DATA_MASK (~WORK_STRUCT_FLAG_MASK)struct list_head entry; /* 中断下半部处理函数的链表 */work_func_t func; /* 处理中断下半部工作的函数 */#ifdef CONFIG_LOCKDEPstruct lockdep_map lockdep_map;#endif};/* 在 kernel/workqueue.c文件中定义* 每个工作者线程对应一个 cpu_workqueue_struct ,其中包含要处理的工作的链表* (即 work_struct 的链表,当此链表不空时,唤醒工作者线程来进行处理)*//** The per-CPU workqueue (if single thread, we always use the first* possible cpu).*/struct cpu_workqueue_struct {spinlock_t lock; /* 锁保护这种结构 */struct list_head worklist; /* 工作队列头节点 */wait_queue_head_t more_work;struct work_struct *current_work;struct workqueue_struct *wq; /* 关联工作队列结构 */struct task_struct *thread; /* 关联线程 */} ____cacheline_aligned;/* 也是在 kernel/workqueue.c 文件中定义的* 每个 workqueue_struct 表示一种工作者类型,系统默认的就是 events 工作者类型* 每个工作者类型一般对应n个工作者线程,n就是处理器的个数*//** The externally visible workqueue abstraction is an array of* per-CPU workqueues:*/struct workqueue_struct {struct cpu_workqueue_struct *cpu_wq; /* 工作者线程 */struct list_head list;const char *name;int singlethread;int freezeable; /* Freeze threads during suspend */int rt;#ifdef CONFIG_LOCKDEPstruct lockdep_map lockdep_map;#endif};
使用工作者队列的方法见下图:
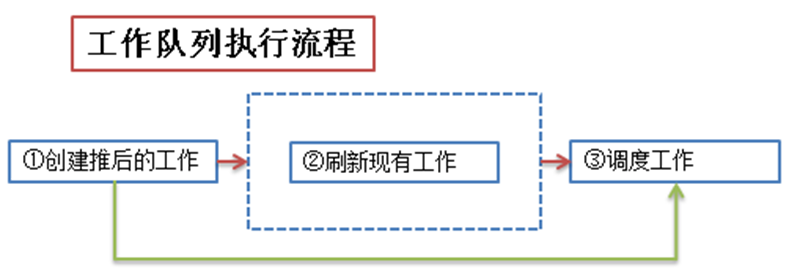
- ① 创建推后执行的工作 - 有静态创建和动态创建 2 种方法 ```c
- @n - work_struct结构体,不用事先定义
/* 动态创建一个 work_struct
- @_work - 已经定义好的一个 work_struct
@_func - 下半部处理函数 */
ifdef CONFIG_LOCKDEP
define INIT_WORK(_work, _func)
do {
static struct lock_class_key __key;(_work)->data = (atomic_long_t) WORK_DATA_INIT();lockdep_init_map(&(_work)->lockdep_map, #_work, &__key, 0);INIT_LIST_HEAD(&(_work)->entry);PREPARE_WORK((_work), (_func));
} while (0)
else
define INIT_WORK(_work, _func)
do {
(_work)->data = (atomic_long_t) WORK_DATA_INIT();INIT_LIST_HEAD(&(_work)->entry);PREPARE_WORK((_work), (_func));
} while (0)
endif
``` 工作队列处理函数的原型:
- ② 刷新现有的工作,这个步骤不是必须的,可以直接从第①步直接进入第③步。刷新现有工作的意思就是在追加新的工作之前,保证队列中的已有工作已经执行完了。 ```c / 刷新系统默认的队列,即 events 队列 / void flush_scheduled_work(void);
/* 刷新用户自定义的队列
- @wq - 用户自定义的队列 / void flush_workqueue(struct workqueue_struct wq); ```
- ③ 调度工作 - 调度新定义的工作,使之处于等待处理器执行的状态
```c
/* 调度第一步中新定义的工作,在系统默认的工作者线程中执行此工作
- @work - 第一步中定义的工作 / schedule_work(struct work_struct work);
/* 调度第一步中新定义的工作,在系统默认的工作者线程中执行此工作
- @work - 第一步中定义的工作
- @delay - 延迟的时钟节拍 / int schedule_delayed_work(struct delayed_work work, unsigned long delay);
/* 调度第一步中新定义的工作,在用户自定义的工作者线程中执行此工作
- @wq - 用户自定义的工作队列类型
- @work - 第一步中定义的工作 / int queue_work(struct workqueue_struct wq, struct work_struct *work);
/* 调度第一步中新定义的工作,在用户自定义的工作者线程中执行此工作
- @wq - 用户自定义的工作队列类型
- @work - 第一步中定义的工作
- @delay - 延迟的时钟节拍
/
int queue_delayed_work(struct workqueue_struct wq,
```struct delayed_work *work, unsigned long delay);
3 . 总结中断下半部的实现
下面对实现中断下半部工作的 3 种机制进行总结,便于在实际使用中决定使用哪种机制
| 下半部处理机制 | 上下文 | 复杂度 | 执行性能 | 顺序执行保障 |
|---|---|---|---|---|
| 软中断 | 中断 | 高(需要自己确保软中断的执行顺序及锁机制) | 好(全部自己实现,便于调优) | 没有 |
| tasklet | 中断 | 中(提供了简单的接口来使用软中断) | 中 | 同类型不能同时执行 |
| 工作队列 | 进程 | 低(在进程上下文中运行,与写用户程序差不多) | 差 | 没有(和进程上下文一样被调度) |
4 中断实现示例
4.1 软中断的实现
本来想用内核模块的方法来测试一下软中断的流程,但是编译时发现软中断注册函数 (open_softirq) 和触发函数(raise_softirq)并没有用 EXPORT_SYMBOL 导出,所以自定义的内核模块中无法使用。
测试的代码如下:
#include <linux/interrupt.h>#include "kn_common.h"MODULE_LICENSE("Dual BSD/GPL");static void my_softirq_func(struct softirq_action*);static int testsoftirq_init(void){// 注册softirq,这里注册的是定时器的下半部open_softirq(TIMER_SOFTIRQ, my_softirq_func);// 触发softirqraise_softirq(TIMER_SOFTIRQ);return 0;}static void testsoftirq_exit(void){printk(KERN_ALERT "************************* n");print_current_time(0);printk(KERN_ALERT "testrbtree is exited! n");printk(KERN_ALERT "************************* n");}static void my_softirq_func(struct softirq_action* act){printk(KERN_ALERT "========================= n");print_current_time(0);printk(KERN_ALERT "my softirq function is been called!.... n");printk(KERN_ALERT "========================= n");}module_init(testsoftirq_init);module_exit(testsoftirq_exit);
由于内核没有用 EXPORT_SYMBOL 导出 open_softirq 和 raise_softirq 函数,所以编译时有如下警告:
WARNING: "open_softirq" [/root/chap08/mysoftirq.ko] undefined!WARNING: "raise_softirq" [/root/chap08/mysoftirq.ko] undefined!
注:编译用的系统Ubuntu 18.04 (4.15.0-45-generic)
没办法,只能尝试修改内核代码 (将 open_softirq 和 raise_softirq 用 EXPORT_SYMBOL 导出),再重新编译内核,然后再尝试能否测试软中断。主要修改 2 个文件,(既然要修改代码,干脆加了一种软中断类型):
/* 修改 kernel/softirq.c */// ... 略 ...char *softirq_to_name[NR_SOFTIRQS] = {"HI", "TIMER", "NET_TX", "NET_RX", "BLOCK", "BLOCK_IOPOLL","TASKLET", "SCHED", "HRTIMER", "RCU", "RXH"}; /* 追加了一种新的softirq,即 "RXH",名字的缩写*/// ... 略 ...void raise_softirq(unsigned int nr){unsigned long flags;local_irq_save(flags);raise_softirq_irqoff(nr);local_irq_restore(flags);}EXPORT_SYMBOL(raise_softirq); /* 追加的代码 */void open_softirq(int nr, void (*action)(struct softirq_action *)){softirq_vec[nr].action = action;}EXPORT_SYMBOL(open_softirq); /* 追加的代码 */// ... 略 .../* 还修改了 include/linux/interrupt.h */enum{HI_SOFTIRQ=0,TIMER_SOFTIRQ,NET_TX_SOFTIRQ,NET_RX_SOFTIRQ,BLOCK_SOFTIRQ,BLOCK_IOPOLL_SOFTIRQ,TASKLET_SOFTIRQ,SCHED_SOFTIRQ,HRTIMER_SOFTIRQ,RCU_SOFTIRQ, /* Preferable RCU should always be the last softirq */RXH_SOFTIRQS, /* 追加的一种中断类型 */NR_SOFTIRQS};
重新编译内核后,在新的内核上再次实验软中断代码:
测试软中断的代码:
#include <linux/interrupt.h>#include "kn_common.h"MODULE_LICENSE("Dual BSD/GPL");static void my_softirq_func(struct softirq_action*);static int testsoftirq_init(void){printk(KERN_ALERT "interrupt's top half! n");// 注册softirq,这里注册的是自定义的软中断类型open_softirq(RXH_SOFTIRQS, my_softirq_func);// 触发softirqraise_softirq(RXH_SOFTIRQS);return 0;}static void testsoftirq_exit(void){printk(KERN_ALERT "************************* n");print_current_time(0);printk(KERN_ALERT "testsoftirq is exited! n");printk(KERN_ALERT "************************* n");}static void my_softirq_func(struct softirq_action* act){printk(KERN_ALERT "========================= n");print_current_time(0);printk(KERN_ALERT "my softirq function is been called!.... n");printk(KERN_ALERT "========================= n");}module_init(testsoftirq_init);module_exit(testsoftirq_exit);
Makefile:
obj-m := intru.ointru-objs := testsoftirq.o kn_common.o#generate the pathCURRENT_PATH:=$(shell pwd)#the current kernel version numberLINUX_KERNEL:=$(shell uname -r)#the absolute pathLINUX_KERNEL_PATH:=/usr/src/linux-headers-$(LINUX_KERNEL) #直接用发行版中的linux源码,不用再下载linux内核源码。注意,每个linux发行版的目录不一定一样#complie objectall:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) modulesclean:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) clean
测试软中断的方法如下:
makeinsmod mysoftirq.kormmod mysoftirqdmesg | tail -9运行结果interrupt's top half!=========================2013-4-22 14:4:57my softirq function is been called!....=========================*************************2013-4-22 14:5:2testsoftirq is exited!************************
4.2 tasklet 的实现
我们可以看出,内核之所以没有导出 open_softirq 和 raise_softirq 函数,可能还是因为提倡我们尽量用 tasklet 来实现中断的下半部工作。
tasklet 测试代码, 在Ubuntu 18.04编译通过:
#include <linux/interrupt.h>#include "kn_common.h"MODULE_LICENSE("Dual BSD/GPL");static void my_tasklet_func(unsigned long);/* mytasklet 必须定义在testtasklet_init函数的外面,否则会出错 */DECLARE_TASKLET(mytasklet, my_tasklet_func, 1000);static int testtasklet_init(void){printk(KERN_ALERT "interrupt's top half!\n");// 如果在这里定义的话,那么 mytasklet是函数的局部变量,// 后面调度的时候会找不到 mytasklet// DECLARE_TASKLET(mytasklet, my_tasklet_func, 1000);// 调度tasklet, 处理器会在适当时候执行这个tasklettasklet_schedule(&mytasklet);return 0;}static void testtasklet_exit(void){printk(KERN_ALERT "*************************\n");print_current_time(0);printk(KERN_ALERT "testtasklet is exited!\n");printk(KERN_ALERT "*************************\n");}static void my_tasklet_func(unsigned long data){printk(KERN_ALERT "=========================\n");print_current_time(0);printk(KERN_ALERT "my tasklet function is been called!....\n");printk(KERN_ALERT "parameter data is %ld\n", data);printk(KERN_ALERT "=========================\n");}module_init(testtasklet_init);module_exit(testtasklet_exit);
Makefile:
obj-m := intru.ointru-objs := testtasklet.o kn_common.o#generate the pathCURRENT_PATH:=$(shell pwd)#the current kernel version numberLINUX_KERNEL:=$(shell uname -r)#the absolute pathLINUX_KERNEL_PATH:=/usr/src/linux-headers-$(LINUX_KERNEL) #直接用发行版中的linux源码,不用再下载linux内核源码。注意,每个linux发行版的目录不一定一样#complie objectall:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) modulesclean:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) clean
测试 tasklet 的方法如下:
makeinsmod intru.kormmod intrudmesg | tail -10运行结果interrupt's top half!=========================2013-4-22 14:53:14my tasklet function is been called!....parameter data is 1000=========================*************************2013-4-22 14:53:20testtasklet is exited!*************************
4.3 工作队列的实现
workqueue 的例子的中静态定义了一个工作,动态定义了一个工作。
- 静态定义的工作由系统工作队列(events/n)调度,
- 动态定义的工作由自定义的工作队列(myworkqueue)调度。
测试工作队列的代码:testworkqueue.c
#include <linux/workqueue.h>#include "kn_common.h"MODULE_LICENSE("Dual BSD/GPL");static void my_work_func(struct work_struct *);static void my_custom_workqueue_func(struct work_struct *);/* 静态创建一个工作,使用系统默认的工作者线程,即 events/n */DECLARE_WORK(mywork, my_work_func);static int testworkqueue_init(void){/*自定义的workqueue */struct workqueue_struct *myworkqueue = create_workqueue("myworkqueue");/* 动态创建一个工作 */struct work_struct *mywork2;mywork2 = kmalloc(sizeof(struct work_struct), GFP_KERNEL);INIT_WORK(mywork2, my_custom_workqueue_func);printk(KERN_ALERT "interrupt's top half!\n");/* 刷新系统默认的队列 */flush_scheduled_work();/* 调度工作 */schedule_work(&mywork);/* 刷新自定义的工作队列 */flush_workqueue(myworkqueue);/* 调度自定义工作队列上的工作 */queue_work(myworkqueue, mywork2);return 0;}static void testworkqueue_exit(void){printk(KERN_ALERT "*************************\n");print_current_time(0);printk(KERN_ALERT "my workqueue test is exited!\n");printk(KERN_ALERT "*************************\n");}static void my_work_func(struct work_struct *work){printk(KERN_ALERT "=========================\n");print_current_time(0);printk(KERN_ALERT "my workqueue function is been called!....\n");printk(KERN_ALERT "=========================\n");}static void my_custom_workqueue_func(struct work_struct *work){printk(KERN_ALERT "=========================\n");print_current_time(0);printk(KERN_ALERT "my cutomize workqueue function is been called!....\n");printk(KERN_ALERT "=========================\n");kfree(work);}module_init(testworkqueue_init);module_exit(testworkqueue_exit);
Makefile:
obj-m := intru.ointru-objs := testworkqueue.o kn_common.o#generate the pathCURRENT_PATH:=$(shell pwd)#the current kernel version numberLINUX_KERNEL:=$(shell uname -r)#the absolute pathLINUX_KERNEL_PATH:=/usr/src/linux-headers-$(LINUX_KERNEL) #直接用发行版中的linux源码,不用再下载linux内核源码。注意,每个linux发行版的目录不一定一样#complie objectall:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) modulesclean:make -C $(LINUX_KERNEL_PATH) M=$(CURRENT_PATH) clean
测试 workqueue 的方法如下:
makeinsmod intru.kormmod intrudmesg | tail -13运行结果interrupt's top half!=========================2013-4-23 9:55:29my workqueue function is been called!....==================================================2013-4-23 9:55:29my cutomize workqueue function is been called!....=========================*************************2013-4-23 9:55:29my workqueue is exited!*************************

若有收获,就点个赞吧
0 人点赞
