- 1 驱动的分层思想
- 2 platform总线架构
- define module_platform_driver(__platform_driver) \
- 3 驱动中引入platform的好处
- 4 设备树+platform驱动的点灯示例
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- include
- define DTSLED_CNT 1 / 设备号个数 /
- define DTSLED_NAME “dtsplatled” / 名字 /
- define LEDOFF 0 / 关灯 /
- define LEDON 1 / 开灯 /
1 驱动的分层思想
1.1 主机驱动与外设驱动分离
Linux中的SPI、I2C、USB等子系统都利用了典型的把主机驱动和外设驱动分离的想法, 让主机端只负责产生总线上的传输波形, 而外设端只是通过标准的API来让主机端以适当的波形访问自身,涉及了4个软件模块:
- 主机端驱动
- 连接主机和外设的纽带
- 外设端驱动
- 板级逻辑
分离后的驱动框架如下所示: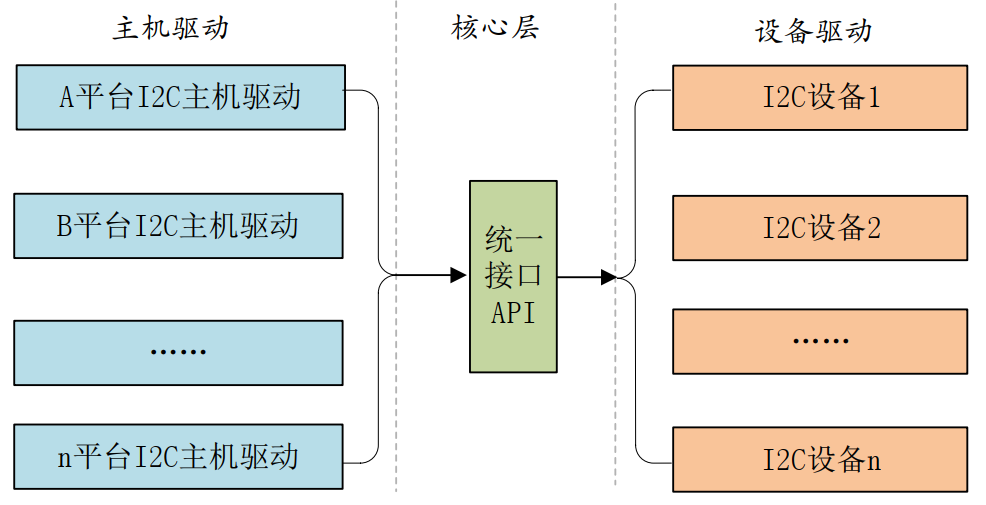
在实际的驱动开发中,一般 I2C 主机控制器驱动已经由半导体厂家编写好了,而设备驱动一般也由设备器件的厂家编写好了,我们只需要提供设备信息即可,比如 I2C 设备的话提供设备连接到了哪个 I2C 接口上, I2C 的速度是多少等等。
相当于驱动只负责驱动,设备只负责设备,想办法将两者进行匹配即可。这个就是 Linux 中的总线(bus)、驱动(driver)和设备(device)模型 。总线就负责设备和驱动之间的匹配和联系。
1.2 驱动核心层
核心层肩负的3大职责:
- 对上提供接口:file_operations的读、 写、 ioctl都被中间层搞定, 各种I/O模型也被处理掉了。
- 中间层实现通用逻辑:可以被底层各种实例共享的代码都被中间层搞定, 避免底层重复实现。
- 对下定义框架:底层的驱动不再需要关心Linux内核VFS的接口和各种可能的I/O模型, 而只需处理与具体硬件相关的访问。
这种分层有时候还不是两层, 可以有更多层, 在软件上呈现为面向对象里类继承和多态的状态。
2 platform总线架构
像上面分层思想讲的,在Linux中,设备和驱动是分离的,通过总线将设备和驱动绑定。
- 在注册设备到系统时,会在左侧会寻找与之匹配的驱动;
- 在注册驱动到设备时,也会在右侧寻找匹配的设备;
这个过程是由总线完成的。由于上面这个优势,一个驱动可以供同类的几个设备使用。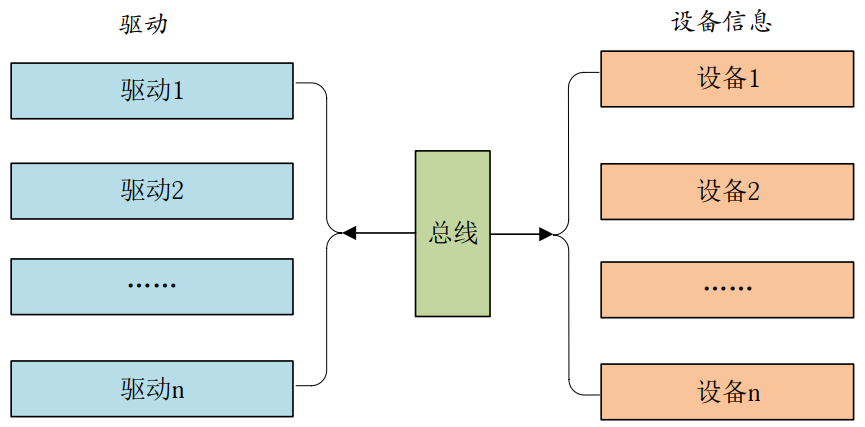
2.1 platform总线
Linux发明了一种虚拟的总线,叫platform总线,对应的结构如下: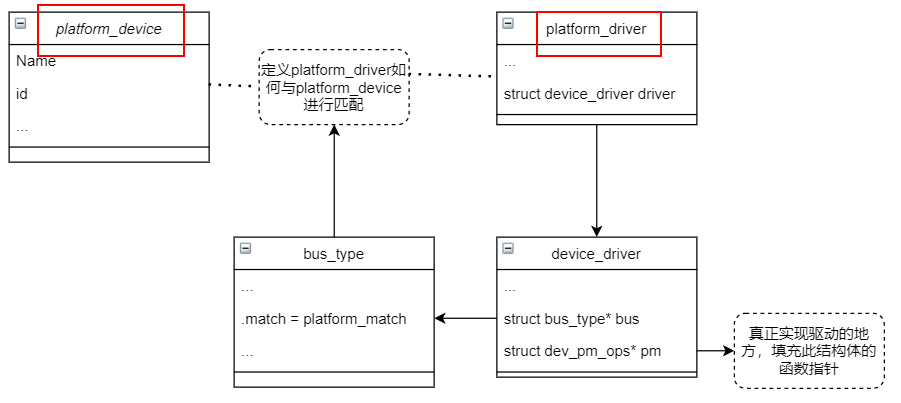
系统为platfrom总线定义了一个bus_type结构体的实例,用于定义platform设备和驱动的匹配关系(不需要我们编写):
//platform平台总线struct bus_type platform_bus_type = {.name = "platform",.dev_groups = platform_dev_groups,.match = platform_match, //匹配关系查找函数.uevent = platform_uevent,.dma_configure = platform_dma_configure,.pm = &platform_dev_pm_ops,};//匹配关系有4种可能性, 所以依次检查//1.基于设备树风格的匹配//2.基于ACPI风格的匹配//3.匹配ID table//4.匹配设备名和驱动名,用的最多static int platform_match(struct device *dev, struct device_driver *drv){struct platform_device *pdev = to_platform_device(dev);struct platform_driver *pdrv = to_platform_driver(drv);/* When driver_override is set, only bind to the matching driver */if (pdev->driver_override)return !strcmp(pdev->driver_override, drv->name);/* Attempt an OF style match first */if (of_driver_match_device(dev, drv))return 1;/* Then try ACPI style match */if (acpi_driver_match_device(dev, drv))return 1;/* Then try to match against the id table */if (pdrv->id_table)return platform_match_id(pdrv->id_table, pdev) != NULL;/* fall-back to driver name match */return (strcmp(pdev->name, drv->name) == 0);}
2.2 platform驱动
platform_driver结构体用于表示platform驱动:
//include/linux/platform_device.hstruct platform_driver {int (*probe)(struct platform_device *);//设备和驱动匹配成功时自动执行int (*remove)(struct platform_device *);void (*shutdown)(struct platform_device *);int (*suspend)(struct platform_device *, pm_message_t state);int (*resume)(struct platform_device *);struct device_driver driver; //相当于基类,提供最基础的驱动框架const struct platform_device_id *id_table; //匹配方式的一种,id表bool prevent_deferred_probe;};//include/linux/device.hstruct device_driver {const char *name;struct bus_type *bus;//指定platform总线实例,用里面的match函数//...const struct of_device_id *of_match_table;//匹配方式的一种,设备树const struct acpi_device_id *acpi_match_table;//匹配方式的一种,acpi//...};
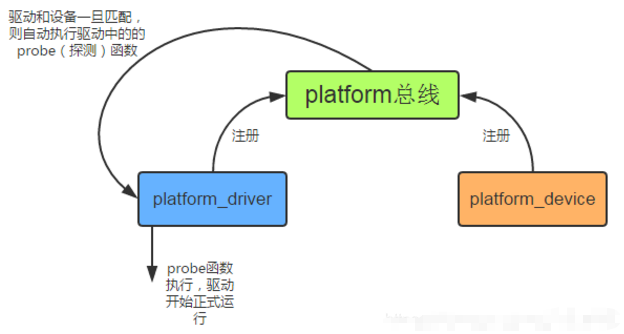
在编写 platform 驱动的时候:
- 首先定义一个 platform_driver 结构体变量,然后实现结构体中的各个成员变量,重点是实现匹配方法以及 probe 函数。当驱动和设备匹配成功以后 probe函数就会执行,具体的驱动程序在probe函数里面编写,比如字符设备驱动等等。
- 当我们定义并初始化好 platform_driver 结构体变量以后,需要在驱动入口函数里面调用platform_driver_register 函数向 Linux 内核注册一个platform驱动。
- 在驱动卸载函数中通过 platform_driver_unregister 函数卸载 platform 驱动 ```c int platform_driver_register (struct platform_driver driver);//成功返回0 void platform_driver_unregister(struct platform_driver );
//module_platform_driver宏可以同时完成2、3步操作
define module_platform_driver(__platform_driver) \
module_driver(__platform_driver, platform_driver_register, \platform_driver_unregister)
<a name="FiCHo"></a>## 2.3 platform设备`platform_device`这个结构体表示 platform 设备。> 这里我们要注意,如果内核支持设备树的话就不要再使用 platform_device 来描述设备了,因为改用设备树去描述了```c//include/linux/platform_device.hstruct platform_device {const char *name;int id;bool id_auto;struct device dev;u64 platform_dma_mask;struct device_dma_parameters dma_parms;u32 num_resources;//资源数量struct resource *resource;//资源,设备信息(内存地址,类型等)const struct platform_device_id *id_entry;char *driver_override; /* Driver name to force a match *//* MFD cell pointer */struct mfd_cell *mfd_cell;/* arch specific additions */struct pdev_archdata archdata;};
同样的,platform设备也需要注册和注销函数:
int platform_device_register(struct platform_device *);void platform_device_unregister(struct platform_device *);
如果使用了设备树,Linux 内核启动的时候会从设备树中读取设备信息,然后将其组织成 platform_device 形式,不再需要手动注册注销设备了。
2.4 工作原理
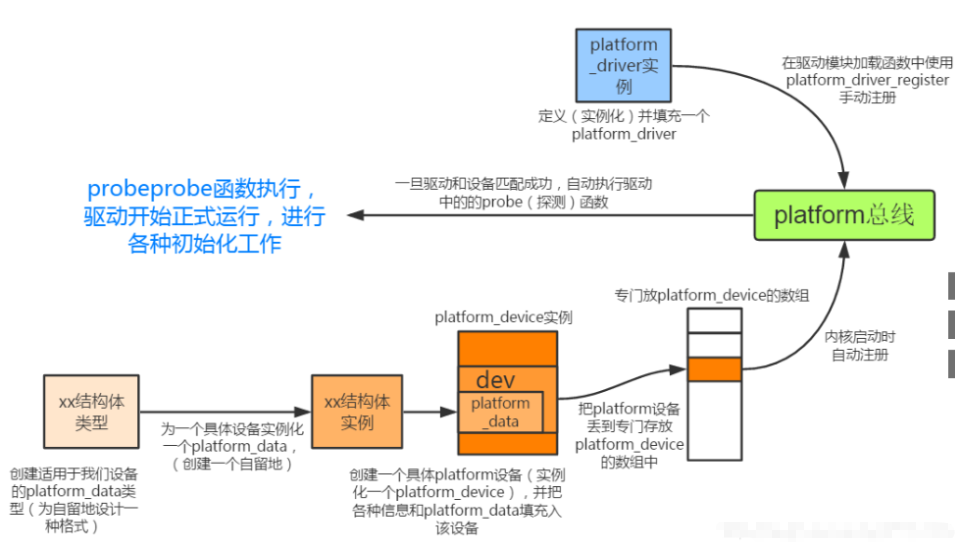
3 驱动中引入platform的好处
- 使得设备被挂接在一个总线上,符合Linux 2.6以后内核的设备模型。其结果是使配套的sysfs节点、设备电源管理都成为可能
- 隔离BSP和驱动。在BSP中定义platform设备和设备使用的资源、设备的具体配置信息,而在驱动中,只需要通过通用API去获取资源和数据,做到了板相关代码和驱动代码分离,使得驱动具有更好的可扩展性和跨平台性
让一个驱动支持多个设备实例。譬如DM9000的驱动只有一份,但是我们可以在板级添加多份DM9000的platform_device,它们都可以与唯一的驱动匹配
4 设备树+platform驱动的点灯示例
单纯的设备树点灯示例参考:13 设备树
本示例将基于设备树自动添加platfrom device,然后编写platform driver:设备树文件和上面链接一致,不做修改
- 驱动程序修改如下:
```c
include
include
include
include
include
include
include
include
include
include
include
include
include
include
include
define DTSLED_CNT 1 / 设备号个数 /
define DTSLED_NAME “dtsplatled” / 名字 /
define LEDOFF 0 / 关灯 /
define LEDON 1 / 开灯 /
/ 映射后的寄存器虚拟地址指针 / static void iomem *IMX6U_CCM_CCGR1; static void iomem SW_MUX_GPIO1_IO03; static void __iomem SW_PAD_GPIO1_IO03; static void iomem *GPIO1_DR; static void iomem *GPIO1_GDIR;
/ dtsled设备结构体 / struct dtsled_dev{ dev_t devid; / 设备号 / struct cdev cdev; / cdev / struct class class; / 类 / struct device device; / 设备 / int major; / 主设备号 / int minor; / 次设备号 / struct device_node nd; / 设备节点 */ };
struct dtsled_dev dtsled; / led设备 /
/*
- @description : LED打开/关闭
- @param - sta : LEDON(0) 打开LED,LEDOFF(1) 关闭LED
- @return : 无
*/
void led_switch(u8 sta)
{
u32 val = 0;
if(sta == LEDON) {
}else if(sta == LEDOFF) {val = readl(GPIO1_DR);val &= ~(1 << 3);writel(val, GPIO1_DR);
}val = readl(GPIO1_DR);val|= (1 << 3);writel(val, GPIO1_DR);
}
/*
- @description : 打开设备
- @param - inode : 传递给驱动的inode
- @param - filp : 设备文件,file结构体有个叫做private_data的成员变量
- 一般在open的时候将private_data指向设备结构体。
- @return : 0 成功;其他 失败 / static int led_open(struct inode inode, struct file filp) { filp->private_data = &dtsled; / 设置私有数据 */ return 0; }
/*
- @description : 从设备读取数据
- @param - filp : 要打开的设备文件(文件描述符)
- @param - buf : 返回给用户空间的数据缓冲区
- @param - cnt : 要读取的数据长度
- @param - offt : 相对于文件首地址的偏移
- @return : 读取的字节数,如果为负值,表示读取失败 / static ssize_t led_read(struct file filp, char __user buf, size_t cnt, loff_t offt) { return 0; }
/*
- @description : 向设备写数据
- @param - filp : 设备文件,表示打开的文件描述符
- @param - buf : 要写给设备写入的数据
- @param - cnt : 要写入的数据长度
- @param - offt : 相对于文件首地址的偏移
@return : 写入的字节数,如果为负值,表示写入失败 / static ssize_t led_write(struct file filp, const char __user buf, size_t cnt, loff_t offt) { int retvalue; unsigned char databuf[1]; unsigned char ledstat;
retvalue = copy_from_user(databuf, buf, cnt); if(retvalue < 0) {
printk("kernel write failed!\r\n");return -EFAULT;
}
ledstat = databuf[0]; / 获取状态值 /
if(ledstat == LEDON) {
led_switch(LEDON); /* 打开LED灯 */
} else if(ledstat == LEDOFF) {
led_switch(LEDOFF); /* 关闭LED灯 */
} return 0; }
/*
- @description : 关闭/释放设备
- @param - filp : 要关闭的设备文件(文件描述符)
- @return : 0 成功;其他 失败 / static int led_release(struct inode inode, struct file *filp) { return 0; }
/ 设备操作函数 / static struct file_operations dtsled_fops = { .owner = THIS_MODULE, .open = led_open, .read = led_read, .write = led_write, .release = led_release, };
/*
- @description : flatform 驱动的 probe 函数,当驱动与设备匹配以后此函数就会执行
- @param - dev : platform 设备
@return : 0,成功;其他负值,失败 / static int led_probe(struct platform_device dev) { / 初始化LED / IMX6U_CCM_CCGR1 = of_iomap(dtsled.nd, 0); SW_MUX_GPIO1_IO03 = of_iomap(dtsled.nd, 1);
SW_PAD_GPIO1_IO03 = of_iomap(dtsled.nd, 2);
GPIO1_DR = of_iomap(dtsled.nd, 3); GPIO1_GDIR = of_iomap(dtsled.nd, 4);
/ 2、使能GPIO1时钟 / val = readl(IMX6U_CCM_CCGR1); val &= ~(3 << 26); / 清楚以前的设置 / val |= (3 << 26); / 设置新值 / writel(val, IMX6U_CCM_CCGR1);
/* 3、设置GPIO1_IO03的复用功能,将其复用为
GPIO1_IO03,最后设置IO属性。 */ writel(5, SW_MUX_GPIO1_IO03);
/寄存器SW_PAD_GPIO1_IO03设置IO属性 bit 16:0 HYS关闭 bit [15:14]: 00 默认下拉 bit [13]: 0 kepper功能 bit [12]: 1 pull/keeper使能 bit [11]: 0 关闭开路输出 bit [7:6]: 10 速度100Mhz bit [5:3]: 110 R0/6驱动能力 bit [0]: 0 低转换率 / writel(0x10B0, SW_PAD_GPIO1_IO03);
/ 4、设置GPIO1_IO03为输出功能 / val = readl(GPIO1_GDIR); val &= ~(1 << 3); / 清除以前的设置 / val |= (1 << 3); / 设置为输出 / writel(val, GPIO1_GDIR);
/ 5、默认关闭LED / val = readl(GPIO1_DR); val |= (1 << 3);
writel(val, GPIO1_DR);/ 注册字符设备驱动 / / 1、创建设备号 / if (dtsled.major) { / 定义了设备号 / dtsled.devid = MKDEV(dtsled.major, 0); register_chrdev_region(dtsled.devid, DTSLED_CNT, DTSLED_NAME); } else { / 没有定义设备号 / alloc_chrdev_region(&dtsled.devid, 0, DTSLED_CNT, DTSLED_NAME); / 申请设备号 / dtsled.major = MAJOR(dtsled.devid); / 获取分配号的主设备号 / dtsled.minor = MINOR(dtsled.devid); / 获取分配号的次设备号 / } printk(“dtsled major=%d,minor=%d\r\n”,dtsled.major, dtsled.minor);
/ 2、初始化cdev / dtsled.cdev.owner = THIS_MODULE; cdev_init(&dtsled.cdev, &dtsled_fops);
/ 3、添加一个cdev / cdev_add(&dtsled.cdev, dtsled.devid, DTSLED_CNT);
/ 4、创建类 / dtsled.class = class_create(THIS_MODULE, DTSLED_NAME); if (IS_ERR(dtsled.class)) { return PTR_ERR(dtsled.class); }
/ 5、创建设备 / dtsled.device = device_create(dtsled.class, NULL, dtsled.devid, NULL, DTSLED_NAME); if (IS_ERR(dtsled.device)) { return PTR_ERR(dtsled.device); }
return 0; }
/*
- @description : remove 函数,移除 platform 驱动的时候此函数会执行
- @param - dev : platform 设备
@return : 0,成功;其他负值,失败 / static int led_remove(struct platform_device dev) { / 取消映射 / iounmap(IMX6U_CCM_CCGR1); iounmap(SW_MUX_GPIO1_IO03); iounmap(SW_PAD_GPIO1_IO03); iounmap(GPIO1_DR); iounmap(GPIO1_GDIR);
/ 注销字符设备驱动 / cdev_del(&dtsled.cdev);/ 删除cdev / unregister_chrdev_region(dtsled.devid, DTSLED_CNT); / 注销设备号 /
device_destroy(dtsled.class, dtsled.devid); class_destroy(dtsled.class); }
/ 匹配列表 / static const struct of_device_id led_of_match[] = { { .compatible = “atkalpha-led” }, { / Sentinel / } };
/ platform驱动结构体 / static struct platform_driver led_driver = { .driver = { .name = “barretled”, / 驱动名字,用于和设备匹配 / .of_match_table = led_of_match, / 设备树匹配表 / }, .probe = led_probe, //指定驱动初始化函数 .remove = led_remove,//指定驱动卸载函数 };
/*
- @description : 驱动模块加载函数
- @param : 无
- @return : 无 */ static int __init leddriver_init(void) { return platform_driver_register(&led_driver); }
/*
- @description : 驱动模块卸载函数
- @param : 无
- @return : 无 */ static void __exit leddriver_exit(void) { platform_driver_unregister(&led_driver); }
module_init(leddriver_init); module_exit(leddriver_exit); MODULE_LICENSE(“GPL”); MODULE_AUTHOR(“barretren”); ```

若有收获,就点个赞吧
0 人点赞
