1、触碰传感器()被按下?

(1)功能:判断触碰传感器是否被按下
(2)参数:P1-P8,传感器端口
(3)返回值:0/1,按下返回1,否则返回0
范例:触碰转动
触碰传感器被按下时,马达M1转动,否则不转动
import rcudef task1():while True:if rcu.GetTouch(1):rcu.SetMotor(1,50)else:rcu.SetMotor(1,0)task1()
2、颜色传感器()数值
(1)功能:读取颜色传感器检测物体的颜色值
(2)参数:P1-P8,传感器端口
(3)返回值:1-6,对应红、绿、蓝、黄、黑、白色
范例:测色移动
颜色传感器检测到红色,马达M1转动,其余颜色不转动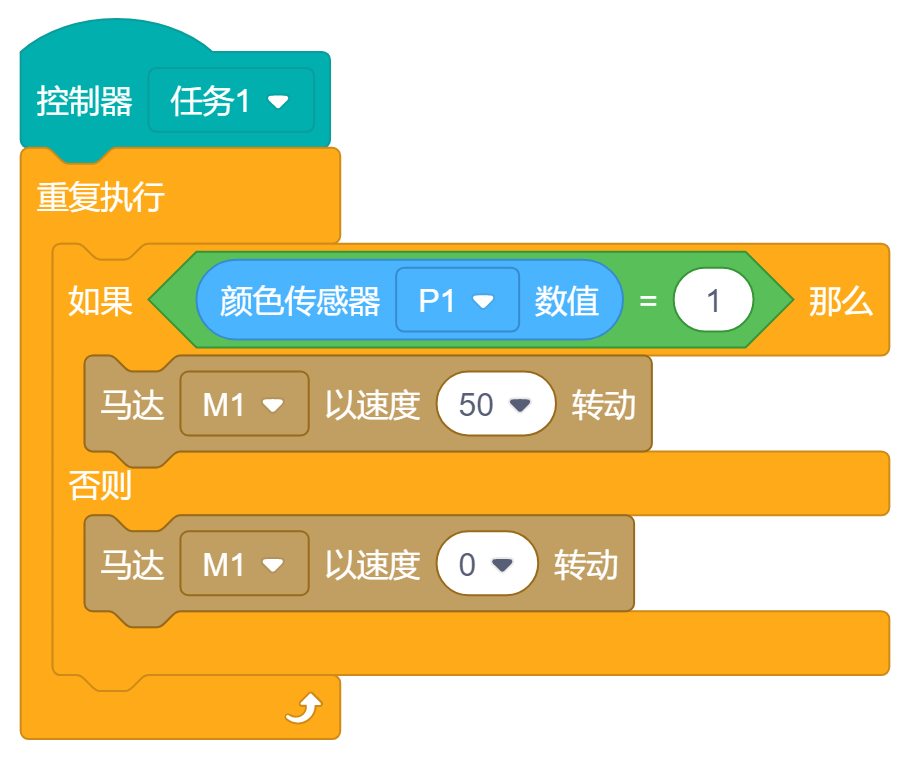
import rcudef task1():while True:if (rcu.GetColorSensor(1, 4)==1):rcu.SetMotor(1,50)else:rcu.SetMotor(1,0)task1()
3、超声波传感器()数值
(1)功能:读取超声传感器与障碍物的距离值
(2)参数:P1-P8,传感器端口
(3)返回值:7-180, 单位cm
范例:测距移动
当超声波传感器检测到自身与障碍物的距离小于20时,马达M1反方向转动,否则正方向转动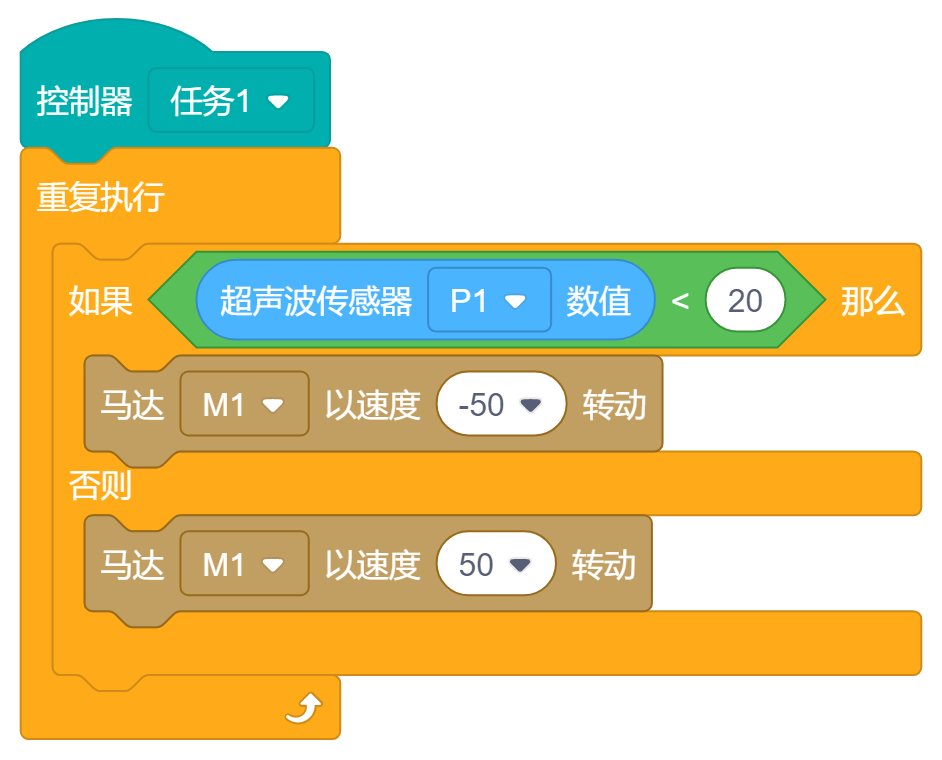
import rcudef task1():while True:if (rcu.GetUltrasound(1)<20):rcu.SetMotor(1,-50)else:rcu.SetMotor(1,50)task1()
4、光电传感器()数值
(1)功能:读取光电传感器检测物体的颜色深度值
(2)参数:P1-P8,传感器端口
(3)返回值:0-4095, 数值随着被测物体颜色越深而减少
范例:深浅检测
当光电传感器测出的返回值小于1000,显示“这是深色”,否则显示“这是浅色”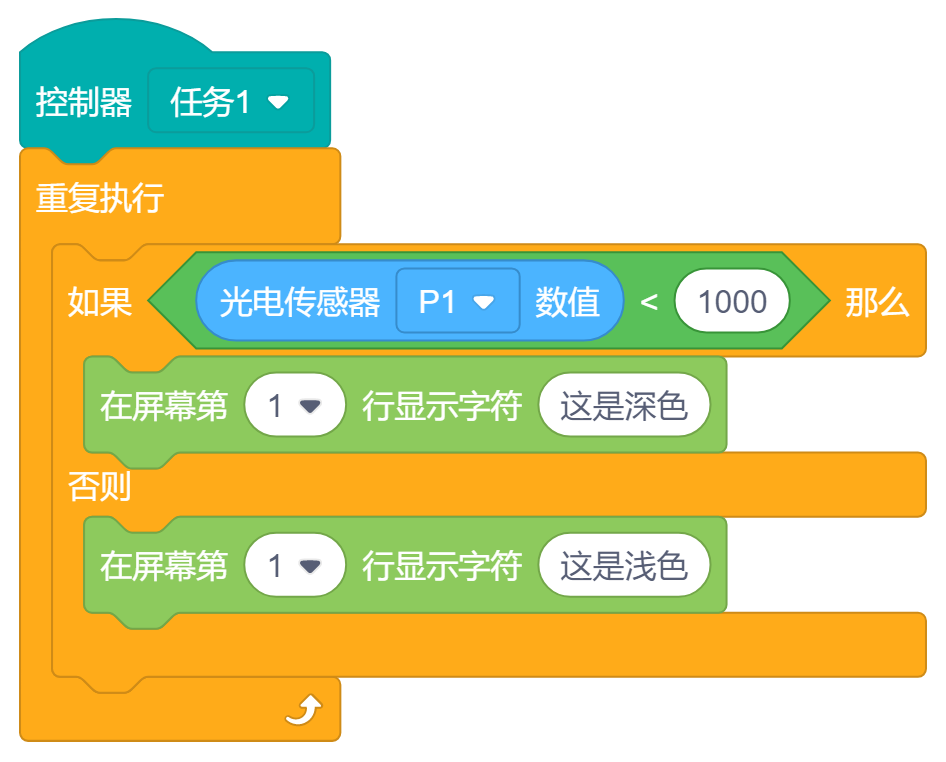
import rcudef task1():while True:if (rcu.GetLightSensor(1)<1000):rcu.SetDisplayString(1,"这是深色",0xFFE0,0x0000)else:rcu.SetDisplayString(1,"这是浅色",0xFFE0,0x0000)task1()
5、光电传感器()数字数值

(1)功能:判断光电传感器检测的物体颜色深度是否小于阈值
(2)参数:P1-P8,传感器端口
(3)返回值:0/1,低于阈值返回1,否则返回0
范例:深浅检测
当光电传感器数字数值的返回值为1时,显示“这是深色”,否则显示“这是浅色”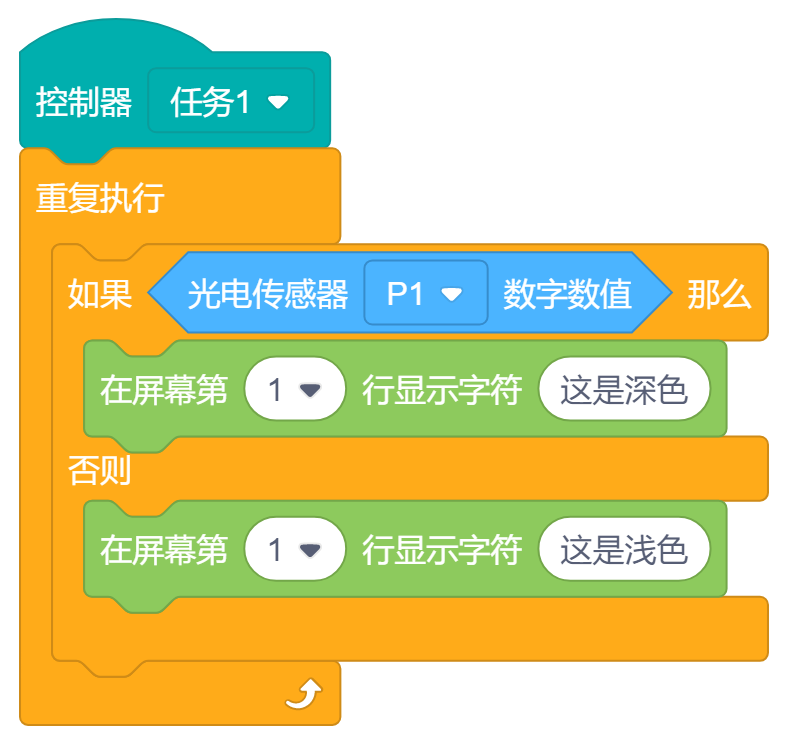
import rcudef task1():while True:if rcu.GetLightSensorData(1):rcu.SetDisplayString(1,"这是深色",0xFFE0,0x0000)else:rcu.SetDisplayString(1,"这是浅色",0xFFE0,0x0000)task1()
6、光电传感器()灯()
(1)功能:开启或关闭光电传感器的LED灯
(2)参数:P1-P8,传感器端口
(3)参数:“关”“开”,参数为“开”时开启灯,参数为“关”时关闭灯
范例:闪灯提示器
检测到超过阈值的颜色后,闪灯三次提示,没超过阈值时,LED灯常亮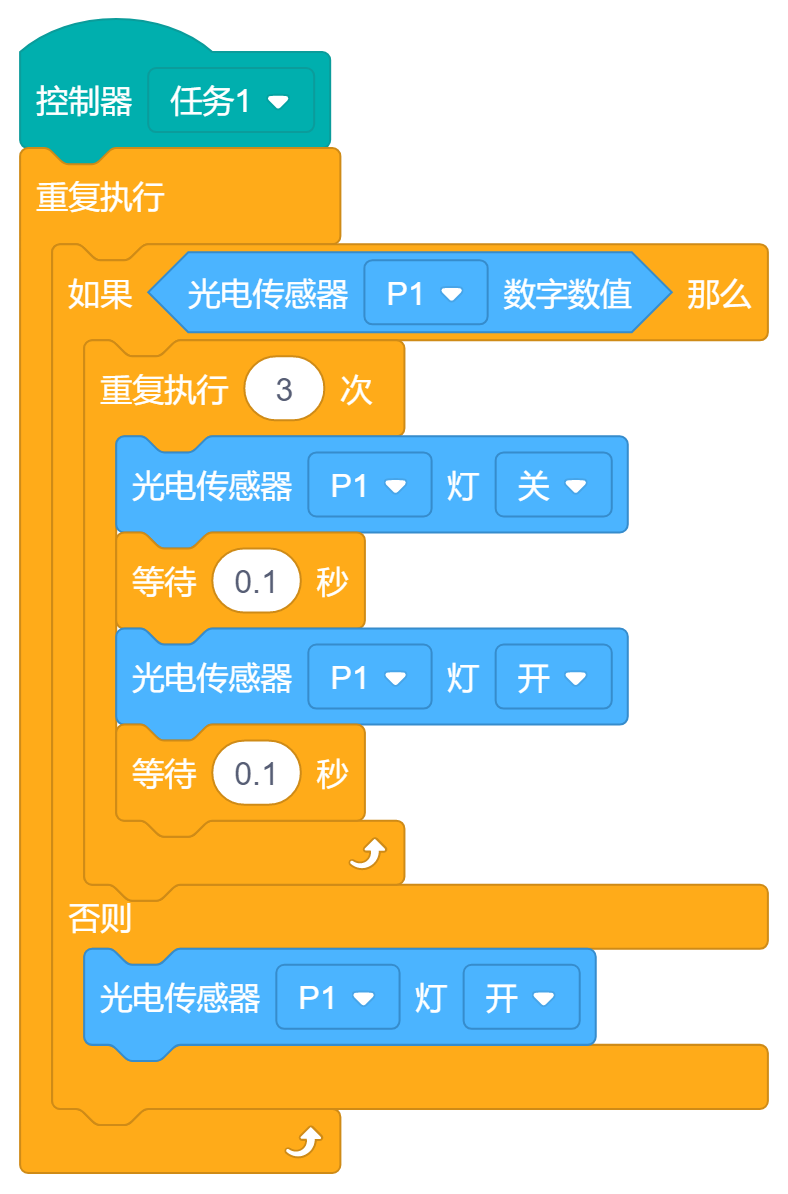
import rcudef task1():while True:if rcu.GetLightSensorData(1):for count in range(3):rcu.SetLightSensorLed(1,0)rcu.SetWaitForTime(0.1)rcu.SetLightSensorLed(1,1)rcu.SetWaitForTime(0.1)else:rcu.SetLightSensorLed(1,1)task1()
7、彩灯模块()设置为()
(1)功能:设置彩灯模块的显示颜色
(2)参数:P1-P8,传感器端口
(3)参数:“红色”“绿色”“蓝色”“黄色”“紫色”“青色”“白色”,彩灯颜色
范例:三色跑马灯
红黄蓝三原色交替出现,实现跑马灯效果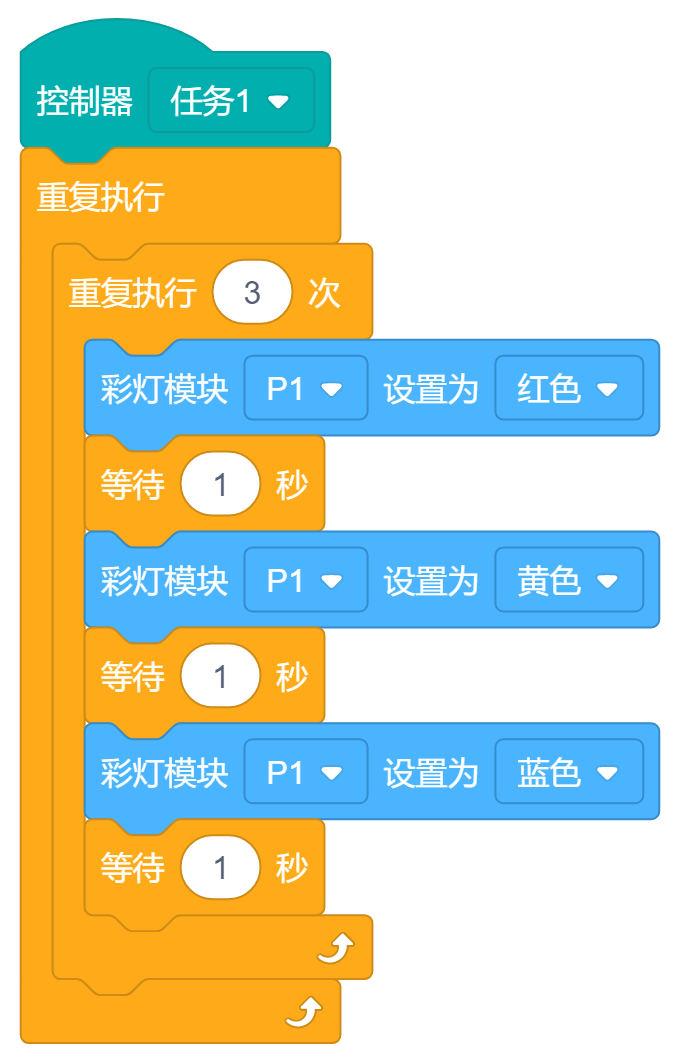
import rcudef task1():while True:for count in range(3):rcu.Set3CLed(1,1)rcu.SetWaitForTime(1)rcu.Set3CLed(1,4)rcu.SetWaitForTime(1)rcu.Set3CLed(1,3)rcu.SetWaitForTime(1)task1()

若有收获,就点个赞吧
0 人点赞
