Dijkstra算法
给定一个出发点,到其他每一个点的最短路径是什么
跟最小生成树算法不同:
- k算法和p算法过程是:如果从给定的点出发,形成联通区域,整体权重和最小值,
- D算法要求是从起始点到每个节点距离最小,要求更强,
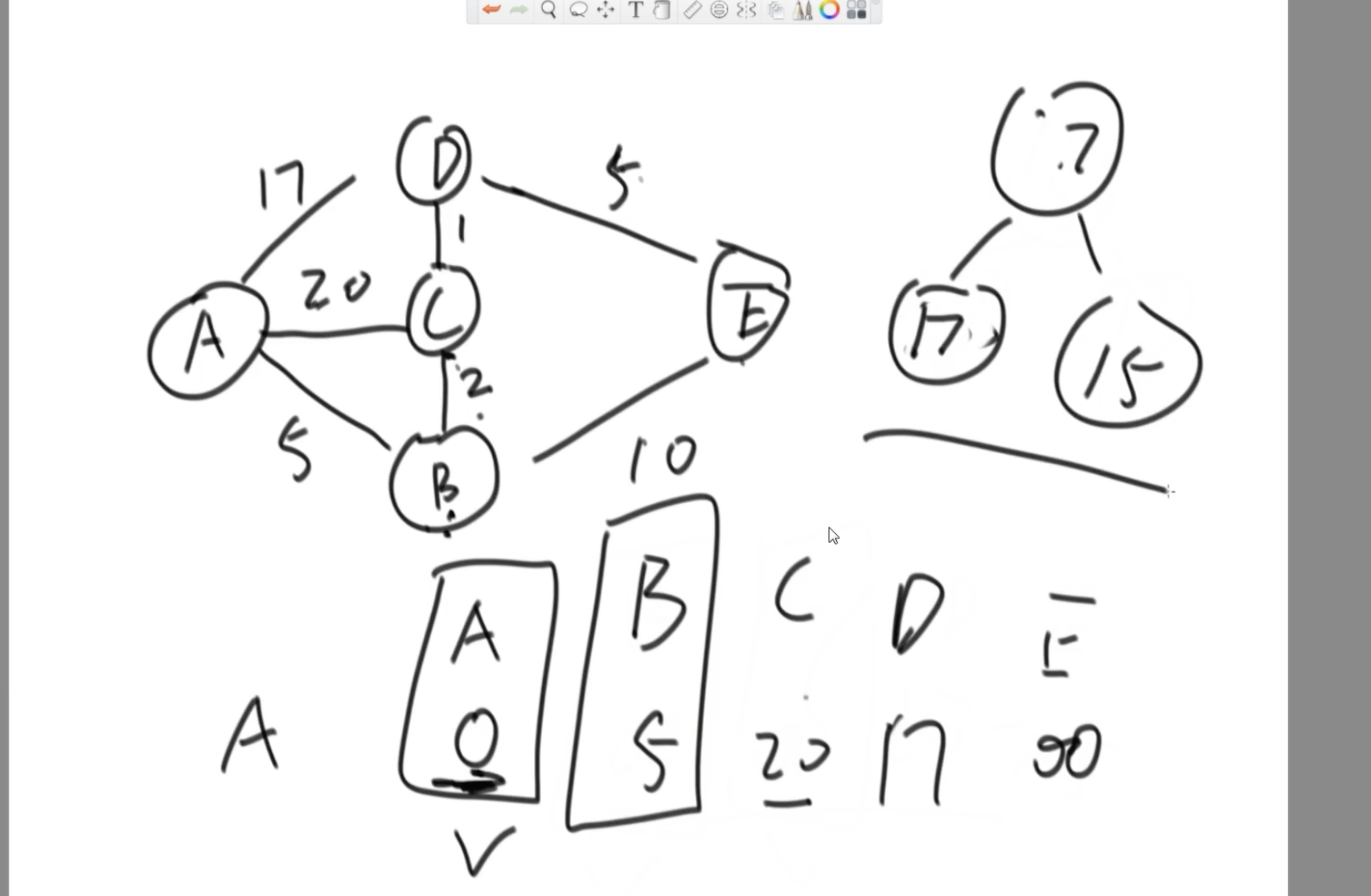
比如下面图的例子,如果按照k算法,abc形成集合,下一个边选对外最小的7这条边,但是对于a来说,到d最短的路是9
这样,仅仅形成联通区域的边虽然小,但是舍弃掉了。
- 同时我们也总结除了D算法的步骤,就是加入一条边的时候,判断a到这条边起点的最短距离加上边权重是否小于从a到d的距离
也是一种贪心思想。
tips:a*算法是一种启发式算法,比D算法好一些,但有限,不是做图像的很难用到。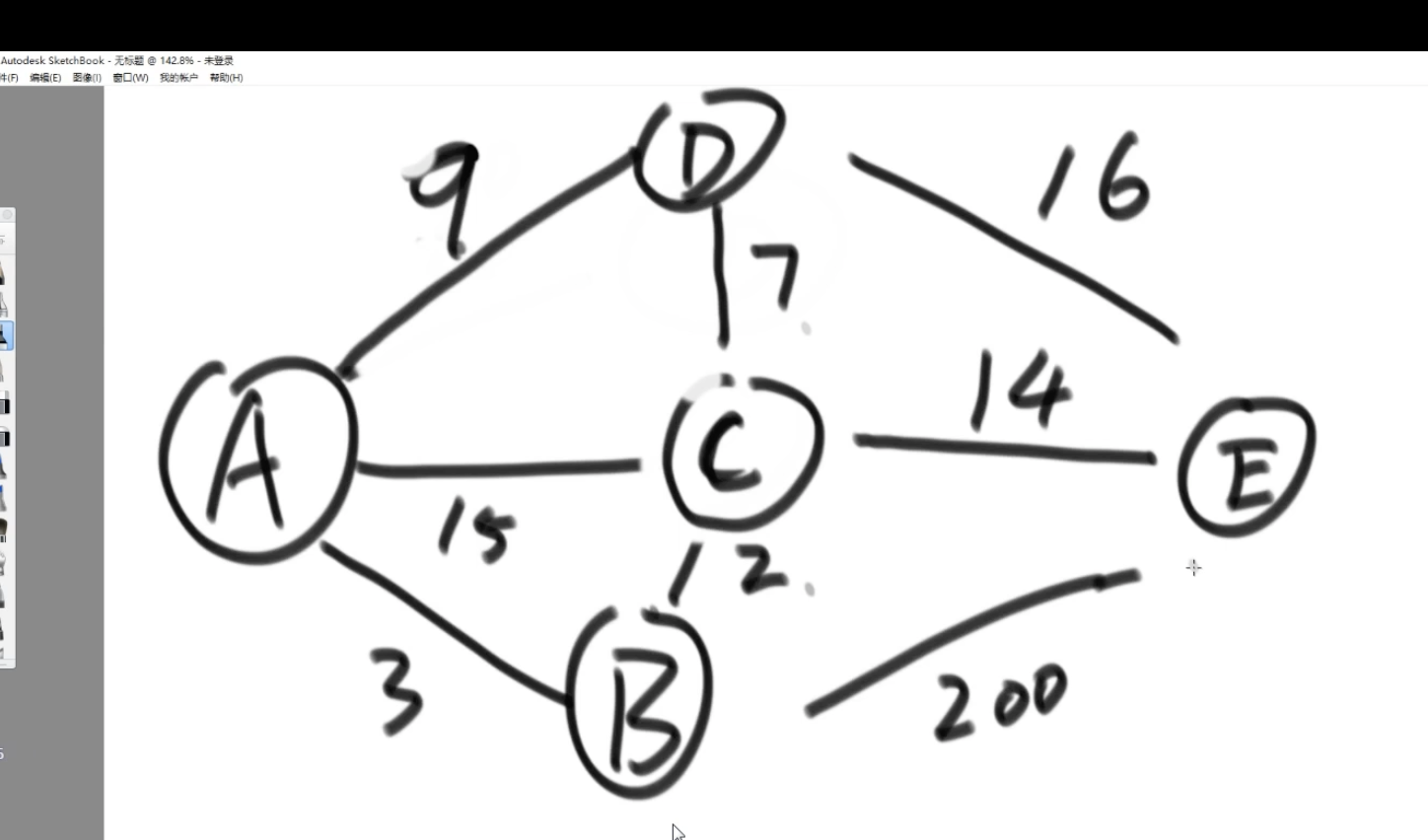

解法1:
step1: 初始化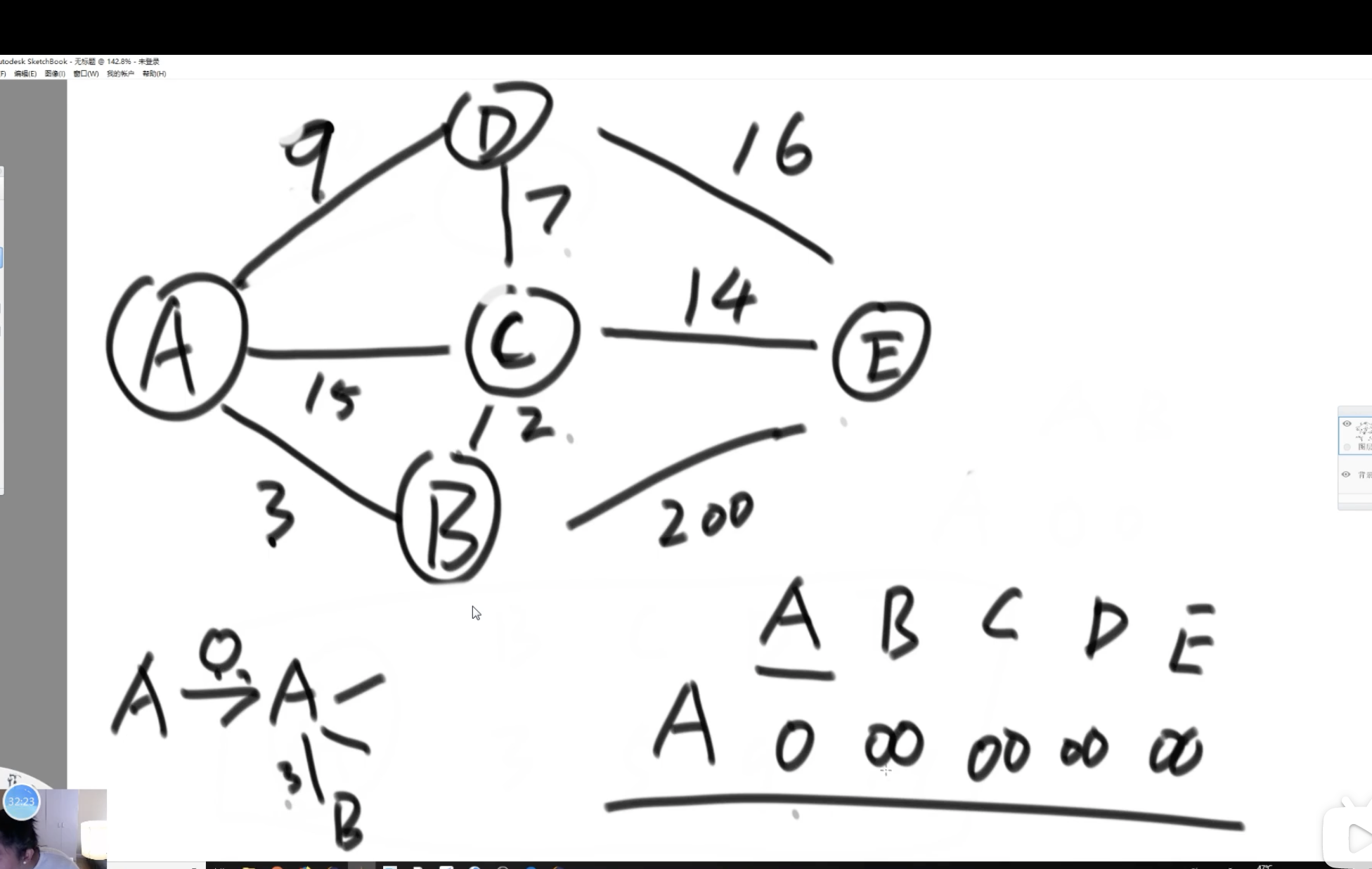
step2 : 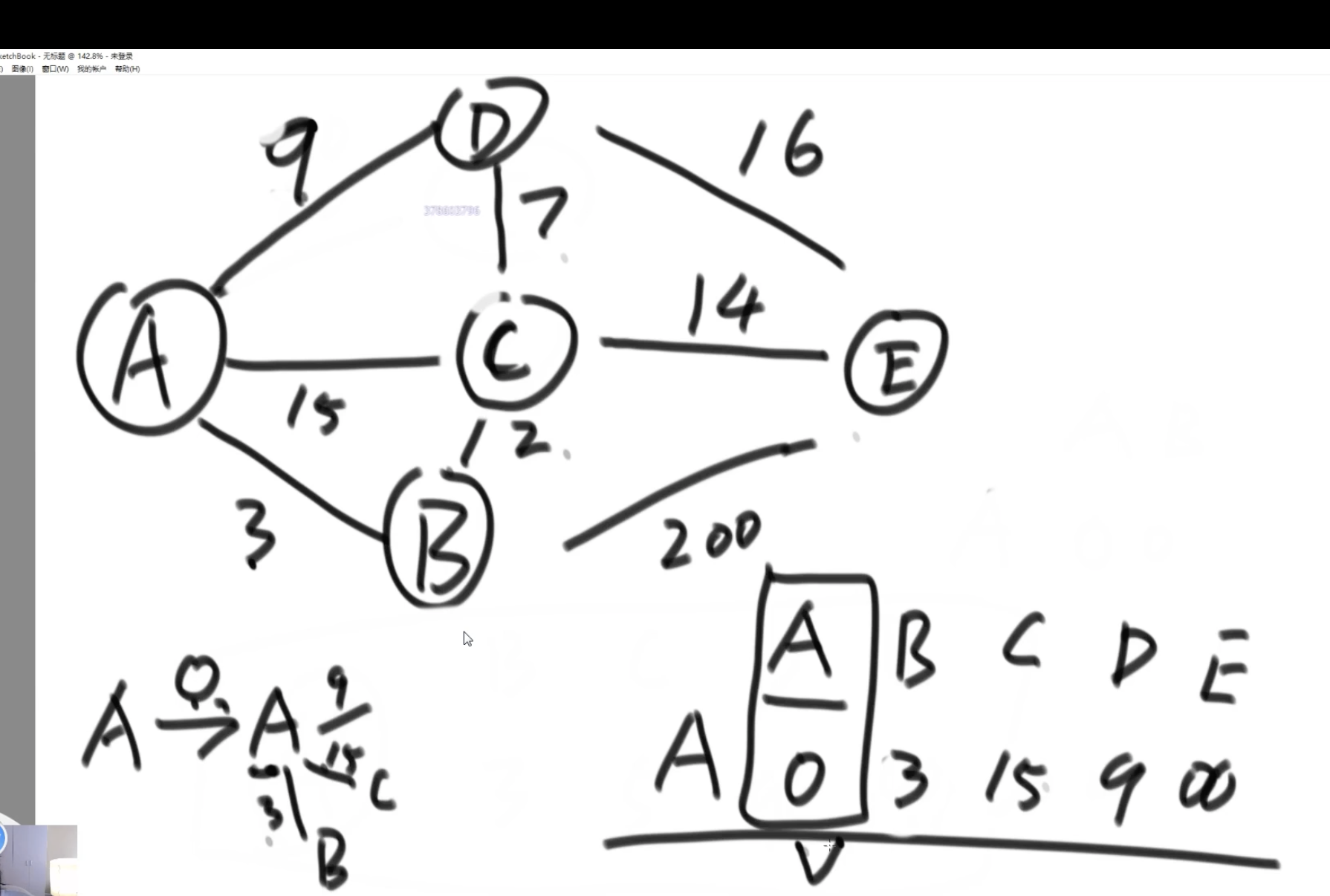
step3 : 框起来的实际上锁死了,以后再也不更新了。
step4: 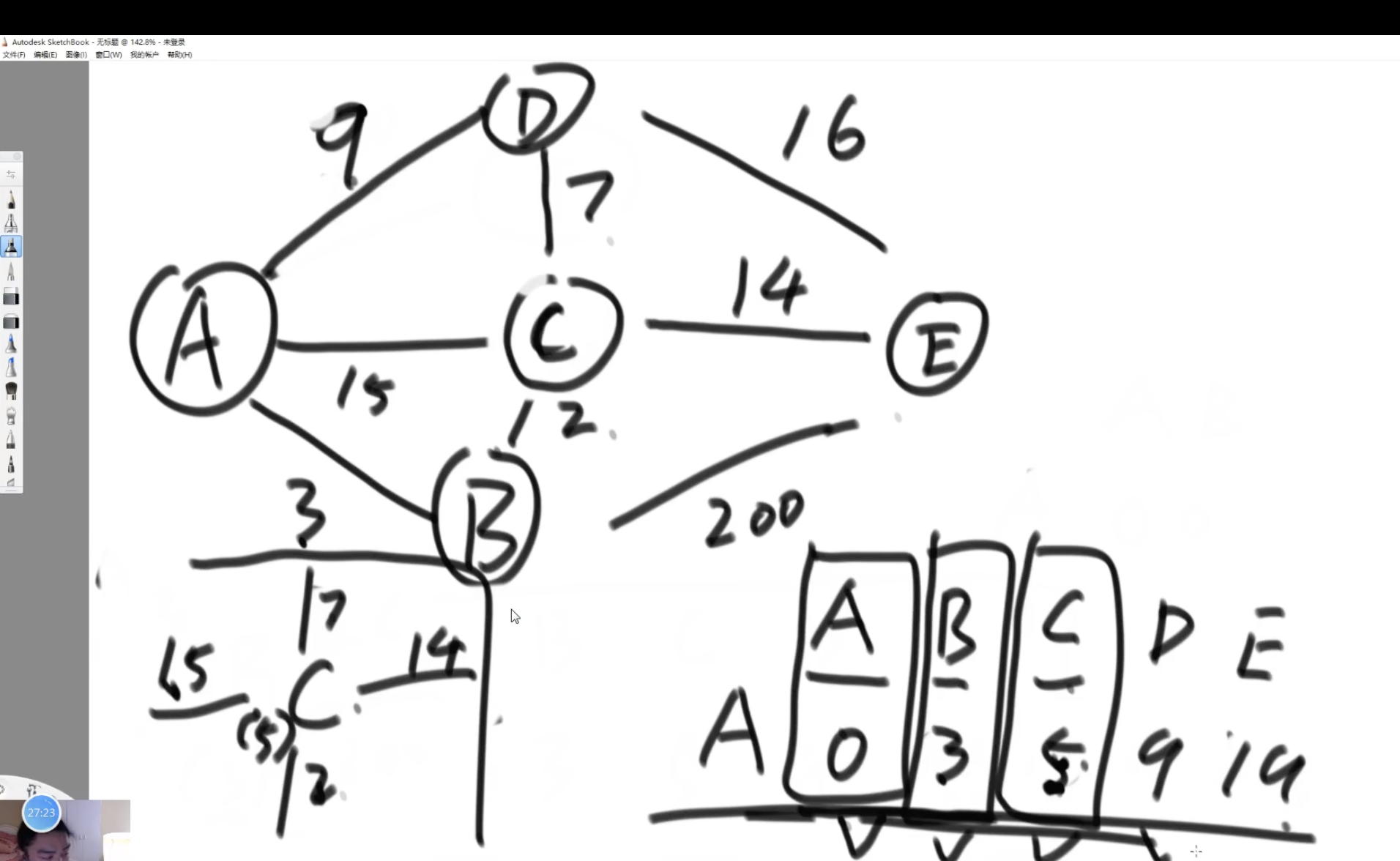
注意:一定要求权重没有负数的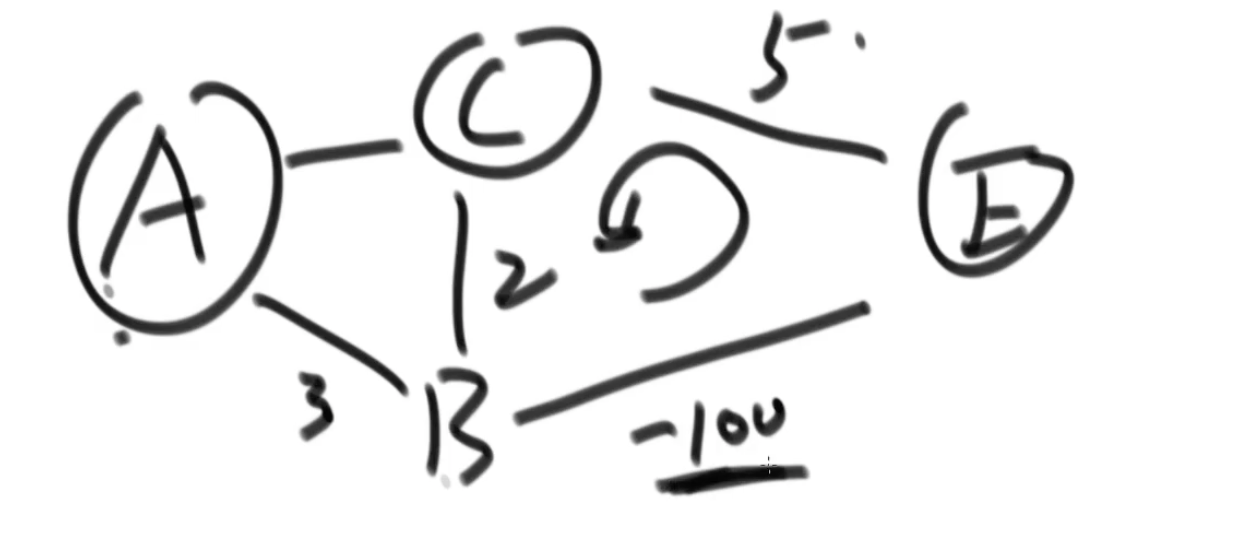
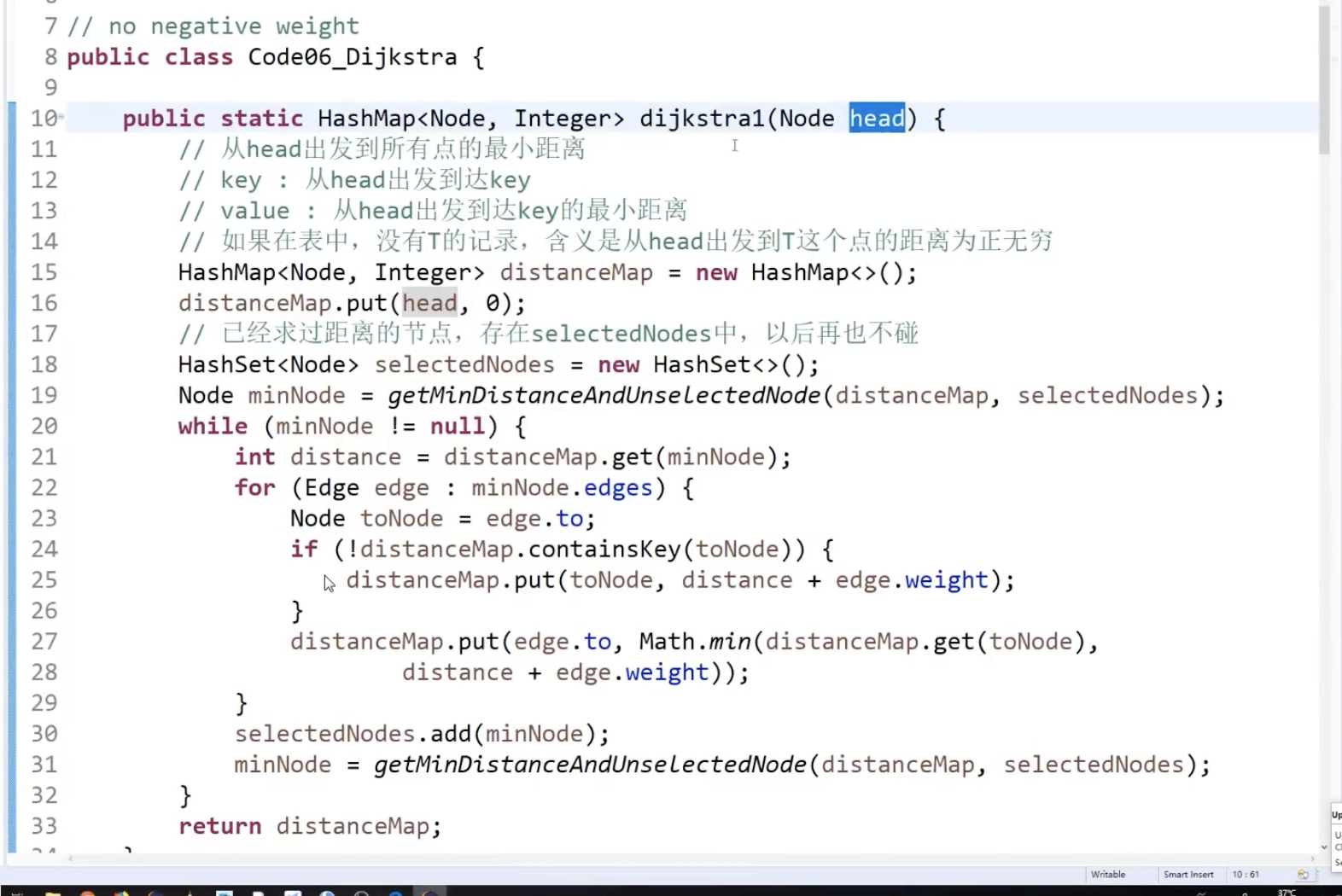
代码:
map指的就是上图右下角的最短距离结构,从head出发的最短距离
没有记录表示正无穷。
step1 : 初始化从跟节点到每个节点的最短距离,只有自己是0
step2: 从中发现距离最短的,且没有被锁死的节点。
step3:对于选中的节点,在所有出边上,判断end对应的当前距离和 从该点沿着出边权重到达end的距离较小值,更新。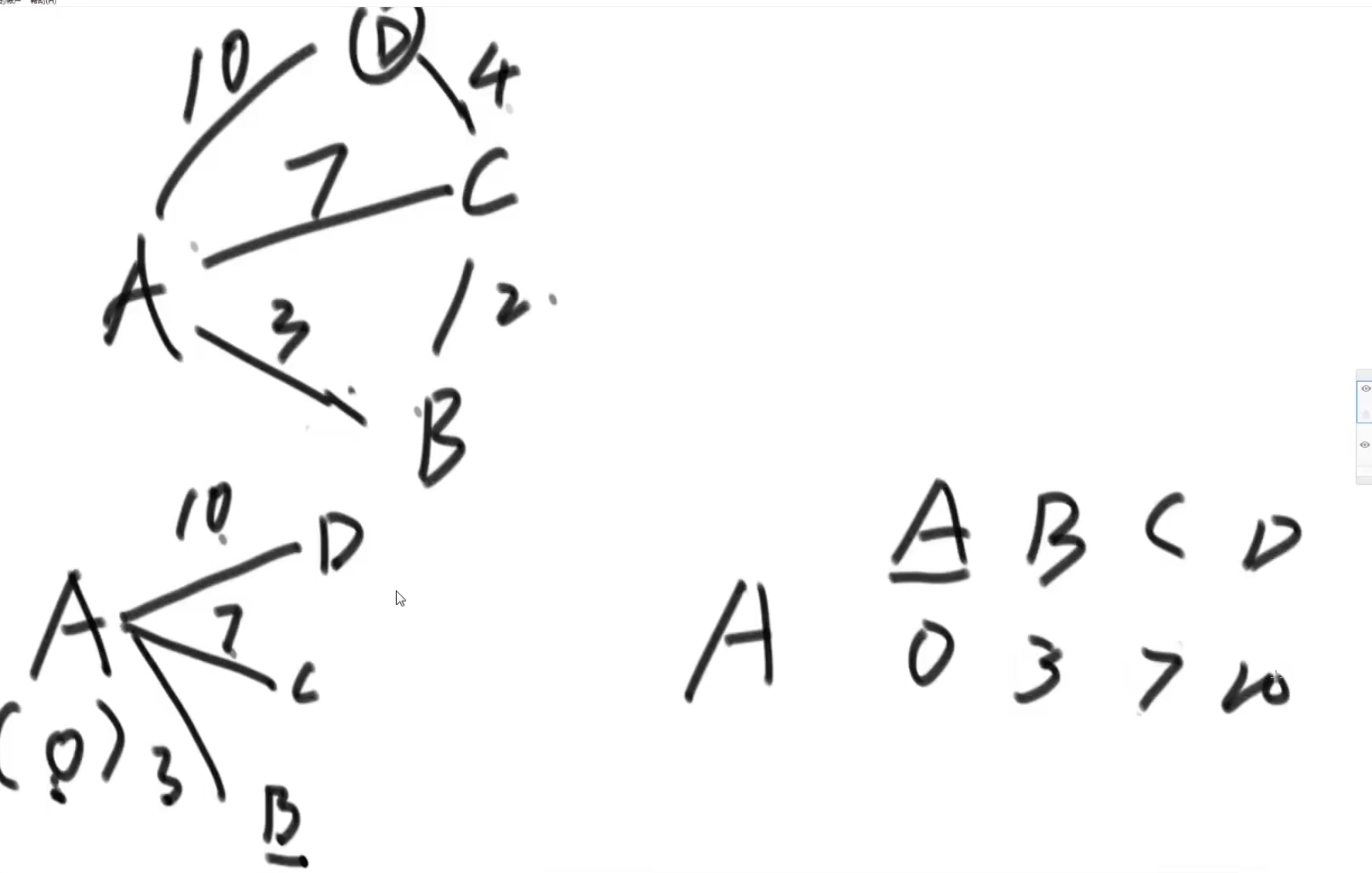
改进: 改写堆的问题,D算法有一个堆的优化,这个忘了;
遍历的方式选出来最小值,在distanceMap中,如果用堆的化,加入到堆,当改变了一个值之后,原始提供的优先队列无法
自动调整堆结构,每次锁死的节点直接弹出也行吧
左程云:
- 假设从F往外跳,较大的值变成较小的值,系统提供的函数在修改一个元素的值的以后,调整代价挺高。没有heapify的操作。
- 如果题目是老老实实给一个值吐一个值,那么系统提供的就行,如果中间碰到要修改值,还希望保持大根堆结构,那么要自己改写。

问题:能不能把沿途的路径给求出来。
维护一个字典,当更新的时候把节点加上。
解法2 :改写堆加速

若有收获,就点个赞吧
0 人点赞
