问题求解的基本方法有搜索法、归约法、归结法、推理法及产生式等。其中推理法、归结法、产生式在前面的章节已经介绍过。
一、搜索概述
- 数据驱动:从初始状态出发的正向搜索
- 目的驱动:从目的状态出发的逆向搜索
是否运用与问题有关的信息
- 启发式搜索:动态调用操作算子,有限选择较为合适的操作算子,尽量减少不必要的搜索
- 盲目搜索:按固定的步骤(依次或随机调用操作算子),能快速地调用一个操作算子
二、状态空间的搜索策略
状态空间四元组表示法: 其中S表示状态集合,O表示操作算子的集合
其中S表示状态集合,O表示操作算子的集合 表示问题的初始状态,G表示问题的目标状态,G可以是若干具体状态。
表示问题的初始状态,G表示问题的目标状态,G可以是若干具体状态。
从S_0节点到G结点的路径称为求解路径,求解路径上的操作算子序列称为状态空间的一个解,当然解往往不是唯一的。
任何类型的数据结构都可以用来描述状态,字符串、向量、多维数组、树、表格等,所选用的数据结构形式要与状态所蕴含的某些特性具有相似性。例如对八数码问题,一个33的阵列便是一个合式的状态描述方式。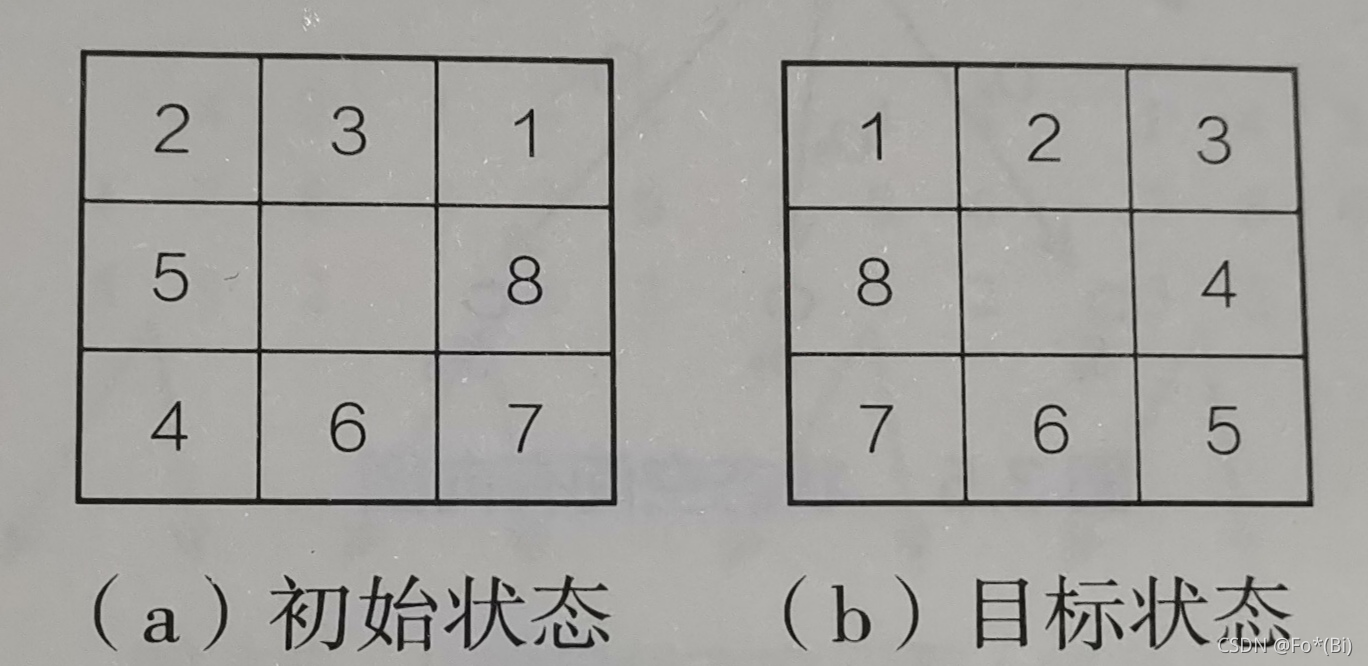
*状态空间的有向图表示
搜索策略的主要任务是确定选取操作算子的方式,它有两种基本方式:盲目搜索和启发式搜索。
三、盲目的图搜索策略
3.1 回溯策略
当遇到不可解结点时就回溯到路径中最近的父节点上,查看该结点是否还有其他的子节点未被扩展,若有则沿着这些子节点继续搜索。
- 路径状态表(PS):保存当前搜索路径上的状态
- 新的路径状态表(NPS):包含了等待搜索的状态,其后裔状态还未被搜索到,即未被生成扩展
不可解状态表(NSS):找不到解路径的状态。如果在搜索中扩展出的状态是它的元素,则可立即删除,不必沿着继续搜索
3.2 宽度优先搜索策略BFS
类似于树的层次遍历。在实际搜索时,为了保存状态空间搜索的轨迹,用到了两个表,open表和closed表。
open表:与回溯算法的NPS表相似,包含了已经生成出来但其子状态未被搜索的状态,open表中状态的排列次序就是搜索的次序。open表是一个队列结构
- closed表:记录了已被生成扩展过的状态,相当于回溯法中PS和NSS表的合并
由于宽度优先搜索总是在生成扩展完N层的所有结点之后才转向N+1层,所以其总能找到最优解(若有解情况下)
3.3 深度优先搜索策略DFS
深度优先搜索法不一定能找到最优解,并且可能由于深度的限制,会找不到解。
- open表:是一个堆栈结构,即先进后出
-
四、启发式图搜索策略
必须针对具体问题具体分析,利用与问题有关的信息,从中得到启发来引导搜索,以达到减少搜索量的目的。
启发式策略概述
注意:启发式策略极易出错,在解决问题过程中启发仅仅是下一步将要采取措施的一个猜想,常常根据经验和直觉判断。一个启发式搜索可能得到一个次优解,也可能一无所获。这是启发式搜索固有的局限性,这种局限性不可能由所谓更好的启发式策略来彻底消除。
在问题求解中,需要利用启发式知识来剪枝以减少状态空间,否则只能求解一些小规模的问题。
利用启发信息设计估价函数,以估价函数计算待搜索节点的价值;估价函数的设计至关重要。启发信息和估价函数
启发信息按运用的方法不同可以分为三种
陈述性启发信息:一般用于使问题的状态空间缩小,例如用棋盘的对称性减小搜索空间的大小
- 过程性启发信息:一般用于构造操作算子,
- 控制性启发信息:
估价函数综合考虑已经付出的代价和将要付出的代价。
其中g(n)越大,越倾向于宽度优先搜索,这有利于搜索的完备性,但会影响搜索的效率。
A
启发式图搜索算法使用两张表记录状态信息:
- open表保留所有已经生成但未扩展的状态
- closed表保留已经扩展的状态
有区别的是open表的排列,其既不是根据宽度优先使用的先进先出,也不同于深度优先使用的先进后出,而是根据估价函数的值的大小进行排列
估价函数也不是越大越好,估价函数值过大会使A算法不一定能搜索到最优解
A*

比A算法好,不仅能得到目标解,并且一定能找到最优解

若有收获,就点个赞吧
0 人点赞
