功能介绍
避障传感器模块常用于智能小车上,或者用于简单的距离判定,可以应用于流水线计数、机器人避障、机器人进行黑白线的跟踪等等。该传感器模块有一对红外线发射与接收管,发射管发出一定频率的红外线,当检测方向遇到障碍物(反射面)时,红外线反射回来被接收管接收,经过比较器电路处理之后,在信号输出接口输出数字信号(通常是一个低电平(0)),同时绿色输出指示灯会亮起,可通过电位器旋钮调节检测距离,顺时针增加,有效距离范围1~10cm,探测角度35°。实际的避障模块如图3.6.1所示。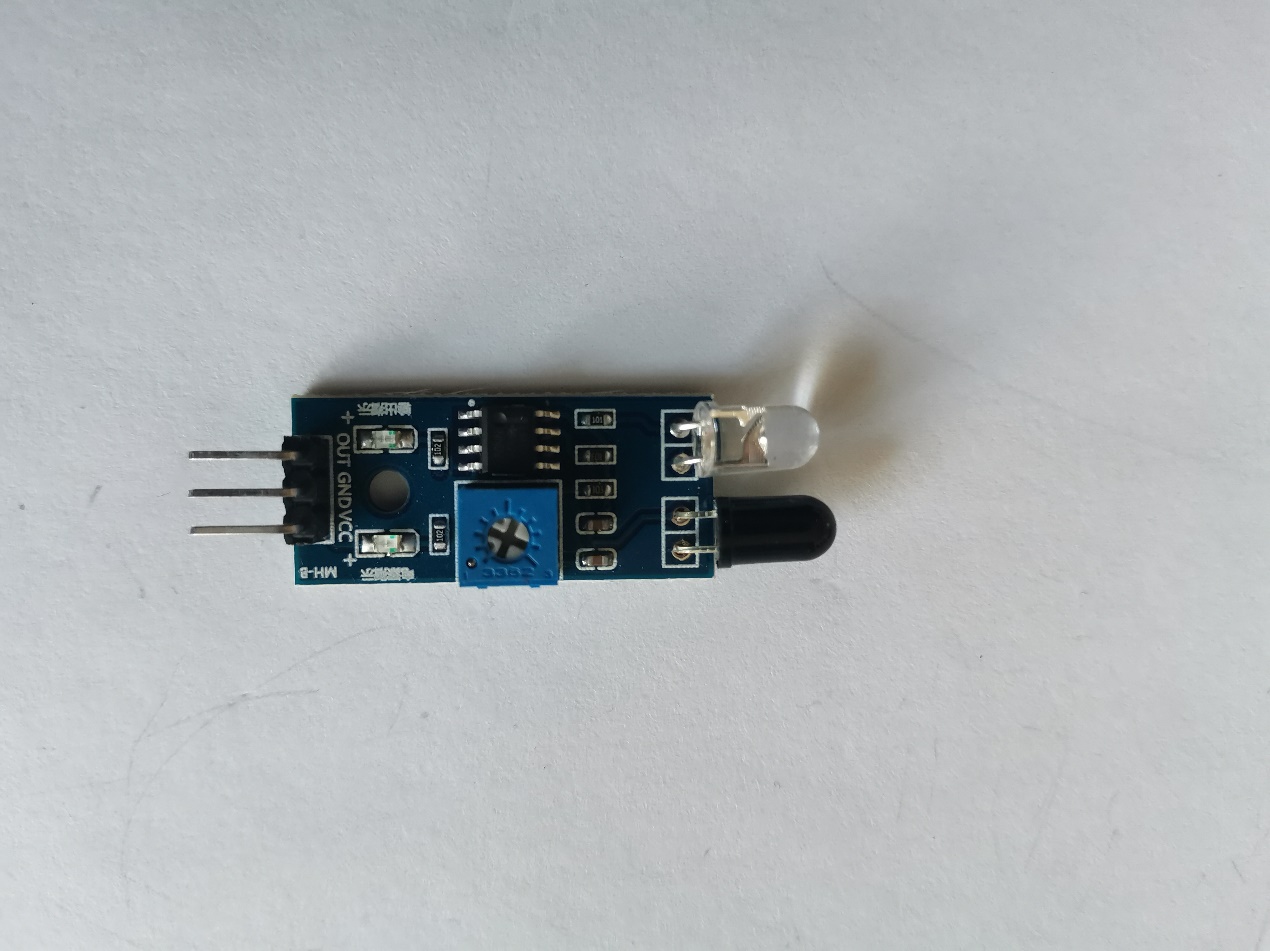
图3.6.1 避障模块实物图
接线说明
| Arduino | 避障传感器 | 说明 |
|---|---|---|
| VCC/+/5V | VCC/+/5V | 供电引脚 |
| GND/G/- | GND/G/- | 电源地线 |
| D2 | OUT(S/D) | 接Arduino的任意数字引脚都可以,模块数字量输出 |
| 输出指示灯不是所有模块都存在 |
使用说明:
该模块在使用前需要对检测的距离进行调节,确定需要检测的距离,此处以2cm为例。首先需要在距离传感器前端2cm左右的地方摆放一个障碍物,最好为浅色(比如白色);再按照接线说明连接好线路,接通电源;用小螺丝刀旋转蓝色电位器中间的“+”字来条件检测的距离。调节到输出指示灯亮灭的临界点时停止,此时,移开障碍物,输出指示灯熄灭,移入障碍物,输出指示灯亮起,说明调节完成。
参考程序:
参考程序和按键模块的参考程序及其类似,其实质就是采用Arduino的数字读取功能。在此就不再提供,使用时请参照3.5按键模块的程序。

若有收获,就点个赞吧
0 人点赞
