
Compared to mBot, mBot2 is overall upgraded in its main control board, extensibility, power supply, motion system, sensor design, and chassis.
CyberPi —— main control board
mBot2 uses CyberPi as its main control board. CyberPi is developed independently by Makeblock. For details about CyberPi and how to use it, see CyberPi and CyberPi Operation Guide.
Performance comparison
| Main control board | CyberPi | mCore |
|---|---|---|
| Processor core | ESP32-WROVER-B | ATmega328/P |
| Processor clock frequency | 240 MHz | 20 MHz |
| Onboard ROM | 448 KB | 1 KB |
| Onboard SRAM | 520 KB | 2 KB |
| SPI Flash | 8 MB | / |
| PSRAM | 8 MB | / |
Function comparison
| Main control board | CyberPi | mCore |
|---|---|---|
| Mode switching | No firmware update required | Firmware update required |
| Multi-thread processing | Supported | Not supported |
| Number of programs it can store | 8 | 1 |
| Python | Supported, microPython+Python3 | Not supported |
| Communication mode | Bluetooth + WiFi WiFi LAN communication |
Bluetooth or 2.4G varying according to product version IR communication |
| Button input | Joystick (five-direction control) Button × 2 Home button |
Button Reset button |
| Onboard sensor | Light sensor Microphone (can record sounds and can function as a sound sensor) Gyroscope Accelerometer |
Light sensor |
| Onboard output | 1.44-inch full-color display Speaker RGB LED × 5 |
Buzzer RGB LED × 2 |
mBot2 Shield —— extensibility
The extensibility and power supply of mBot2 depend on mBot2 Shield.

Extensibility comparison
| mBot2 | mBot | |
|---|---|---|
| Encoder motor port | 2 | 0 |
| DC motor port | 2 | 2 |
| Servo port | 4 | 0 |
| Port for LED strips | 2 (also serve as servo ports) | 0 |
| Port for Arduino modules | 2 (also serve as servo ports) | 0 |
| Number of electronic modules it can be extended with | More than 10* (through the mBuild port) |
4 |
*No more than 10 mBuild modules are recommended for the best performance experience.
Power supply
The power supply for mBot2 has been upgraded.
Power supply comparison
| mBot2 | mBot | |
|---|---|---|
| Capacity | 2500 mAh | 1800 mAh |
| Discharge rate | 3C | 1C |
| Rated power | 27.75 W | 6.66 W |
Charging/Power supplying
The capacity of the battery on mBot2 Shield is 2500 mAh. You need to charge mBot2 Shield through CyberPi. It can be charged while being used.
To charge mBot2 Shield, connect it to CyberPi first, and then use a USB cable (Type-C) to connect CyberPi to a computer or power bank.
The following table describes the charging and power supplying of mBot2 Shield.
| Battery life Supplies power for mBot2 with loads, such as servos and motors, in common application scenarios. |
2.5 hours–5 hours When mBot2 keeps moving or keeps operating with loads: 2.5 hours |
|---|---|
| Upper limit of battery life mBot2 operates in the sleep mode with the screen off. |
More than 24 hours |
| Time to fully charge the battery | 1 hour–2 hours |
Motion system
mBot2 uses the high-precision encoder motors that have been used in mBot Ranger, and we have redesigned the circuits for the encoder motors to ensure the operation safety and quality.
Motor performance comparison
| mBot2 | mBot | |
|---|---|---|
| Rotational speed range | 1–200 RPM | 47–118RPM±10% |
| Rotational angle accuracy | ≤5° | N/A |
| Detection accuracy | 1° | N/A |
| Torque (in operation) | 1500 g·cm | ≥672 g·cm |
| Material of the output shaft | Metal | Plastic |
Motor control comparison
| mBot2 | mBot | |
|---|---|---|
| Turning | Precise turning | |
| Moving straight forward | Deviation: ≤2% Providing the command for moving forward n mm |
Providing only the command for moving forward for n seconds |
| Functioning as a servo | Supported Angle control accuracy: ≤5° |
Not supported |
| Functioning as a knob | Supported Detection accuracy: 1° |
Not supported |
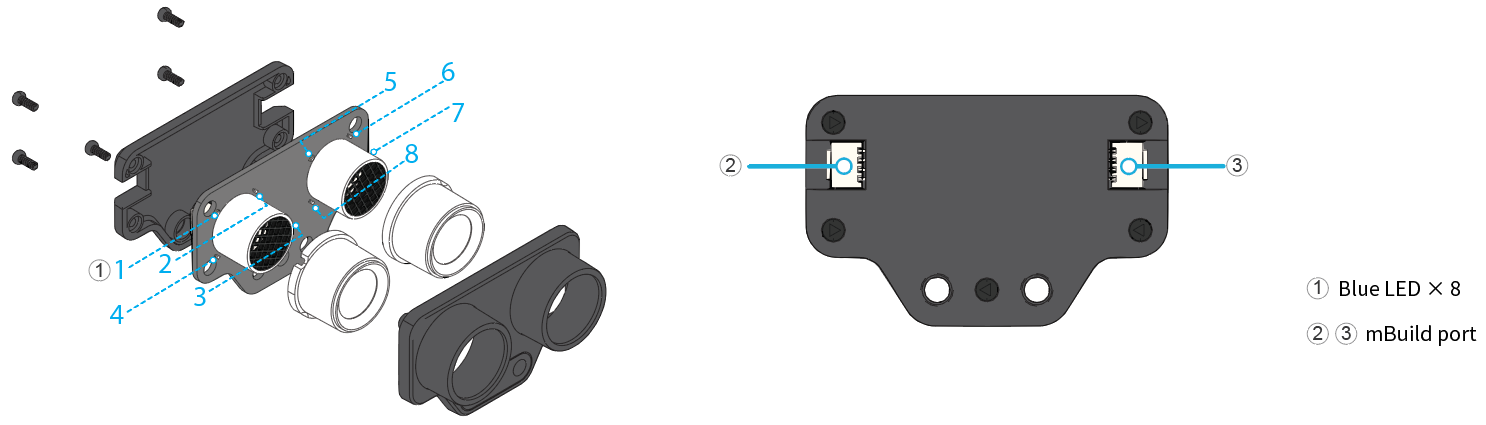
Ultrasonic Sensor 2 and Quad RGB Sensor —— sensor design
Ultrasonic Sensor 2
We have improved our ultrasonic sensor and added blue LEDs, which may increase the potential of mBot2 for emotion expression and interaction.
Ultrasonic sensor comparison
| mBot2 | mBot | |
|---|---|---|
| Plastic casing to improve the durability and quality | Yes | No |
| Built-in chip to improve the operation stability | Yes | No |
| Blue LED (additional function) |
8 | 0 |
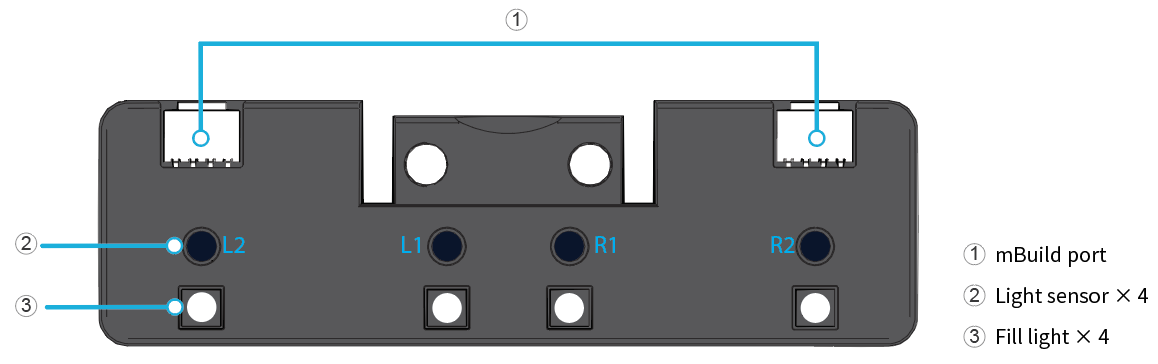
Quad RGB Sensor
Quad RGB Sensor is a new design based on the line-following sensor. It uses visible light as fill lights, which significantly reduce the interference of ambient light. In addition, it provides the function for recognizing colors. With four light sensors, it can support more programming scenarios.

Line-following sensor comparison
| mBot2 | mBot | |
|---|---|---|
| Plastic casing to improve the durability and quality | Yes | No |
| Line-following sensor | 4 | 2 |
| Color sensor | 4 (also serve as line-following sensors) |
No |
| Light sensor | 4 (also serve as line-following sensors) |
No |
| Fill light | Visible light | IR light |
| Ambient light calibration to significantly reduce the interference of ambient light | Yes | No |
Chassis
We have optimized the chassis to ensure that it complies to the hole spacing specifications of the mechanical parts. In addition, we have increased the number of through-holes.
More information

若有收获,就点个赞吧
0 人点赞
