定义常量
#define PI 3.1415926535#define deg2rad(deg) ((deg)*PI/180)#define rad2deg(rad) ((rad)*180/PI)#define AF 12.5#define AB 21.5#define EF 21.5#define CE 21.5#define BC 34.19#define CD 34.95#define bcd_angle deg2rad(120)#define half_AF (AF/2.0)
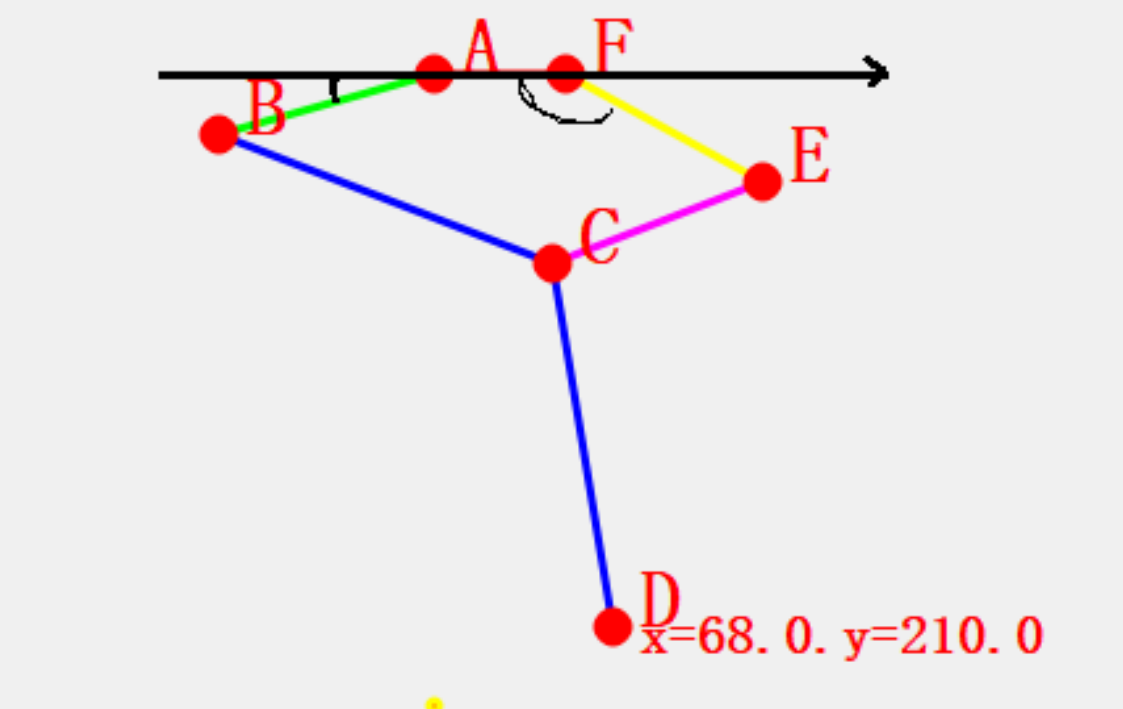
反解实现
double AD2 = 0;double AD = 0;double angle_DAF = 0;double BD2 = 0;double BD = 0;double angle_BAD = 0;double angle_DBA = 0;double angle_DBC = 0;double angle_ABC = 0;double AC2 = 0;double AC = 0;double angle_BAC = 0;double angle_CAF = 0;double CF2 = 0;double CF = 0;double angle_AFC = 0;double angle_CFE = 0;//步态相关double sigma = 0;double zep = 0;double xep_b = 0;double xep_z = 0;double alpha = 0;double beta = 0;//8个舵机的转动角度double steering_angles[8] = {0};void leg_inverse(double fx,double fy,double *alpha,double *beta){//AD长度AD2 = pow((half_AF+fx),2.0)+pow(fy,2.0);AD = sqrt(AD2);//DAF夹角angle_DAF = asin(fy/AD);//BD长度BD2 = pow(BC,2.0)+pow(CD,2.0)-2*BC*CD*cos(bcd_angle);BD = sqrt(BD2);//BAD夹角angle_BAD = acos((pow(AB,2.0)+AD2-BD2)/(2*AB*AD));//alpha角度*alpha = PI-angle_BAD-angle_DAF;angle_DBA = acos((pow(AB,2.0)+BD2-AD2)/(2*AB*BD));angle_DBC = acos((pow(BC,2.0)+BD2-pow(CD,2.0))/(2*BC*BD));angle_ABC = angle_DBA-angle_DBC;//AC长度AC2 = pow(AB,2.0)+pow(BC,2.0)-2*AB*BC*cos(angle_ABC);AC = sqrt(AC2);angle_BAC = acos((pow(AB,2.0)+AC2-pow(BC,2.0))/(2*AB*AC));angle_CAF = PI-(*alpha)-angle_BAC;CF2 = pow(AF,2.0)+AC2-2*AF*AC*cos(angle_CAF);CF = sqrt(CF2);angle_AFC = acos((pow(AF,2.0)+CF2-AC2)/(2*AF*CF));angle_CFE = acos((CF2+pow(EF,2.0)-pow(CE,2.0))/(2*CF*EF));*beta = PI-angle_AFC-angle_CFE;// printf("======================\n");// printf("al:%lf ,beta:%lf\n",*alpha,*beta);}

若有收获,就点个赞吧
0 人点赞
