- 学习目标
- 学习内容
- ifndef _BSP_DOG_STEERING_H
- define _BSP_DOG_STEERING_H
- include “gd32f4xx.h”
- include “systick.h”
- define TIMER_PRESCALER (240 - 1)
- define TIMER_PERIOD (20000 - 1)
- define PWM0_RCU RCU_GPIOA
- define PWM0_PORT GPIOA
- define PWM0_PIN GPIO_PIN_3
- define PWM0_AF GPIO_AF_1
- define PWM0_CH TIMER_CH_3
- define PWM1_RCU RCU_GPIOA
- define PWM1_PORT GPIOA
- define PWM1_PIN GPIO_PIN_2
- define PWM1_AF GPIO_AF_1
- define PWM1_CH TIMER_CH_2
- define PWM2_RCU RCU_GPIOA
- define PWM2_PORT GPIOA
- define PWM2_PIN GPIO_PIN_0
- define PWM2_AF GPIO_AF_1
- define PWM2_CH TIMER_CH_0
- define PWM3_RCU RCU_GPIOA
- define PWM3_PORT GPIOA
- define PWM3_PIN GPIO_PIN_1
- define PWM3_AF GPIO_AF_1
- define PWM3_CH TIMER_CH_1
- define PWM4_RCU RCU_GPIOB
- define PWM4_PORT GPIOB
- define PWM4_PIN GPIO_PIN_4
- define PWM4_AF GPIO_AF_2
- define PWM4_CH TIMER_CH_0
- define PWM5_RCU RCU_GPIOB
- define PWM5_PORT GPIOB
- define PWM5_PIN GPIO_PIN_5
- define PWM5_AF GPIO_AF_2
- define PWM5_CH TIMER_CH_1
- define PWM6_RCU RCU_GPIOB
- define PWM6_PORT GPIOB
- define PWM6_PIN GPIO_PIN_0
- define PWM6_AF GPIO_AF_2
- define PWM6_CH TIMER_CH_2
- define PWM7_RCU RCU_GPIOB
- define PWM7_PORT GPIOB
- define PWM7_PIN GPIO_PIN_1
- define PWM7_AF GPIO_AF_2
- define PWM7_CH TIMER_CH_3
- define a1 5
- define a2 0
- define a3 5
- define a4 0
- define a5 5
- define a6 0
- define a7 5
- define a8 5
- endif
学习目标
- 实现舵机控制
- 实现板级舵机驱动
学习内容
原理图
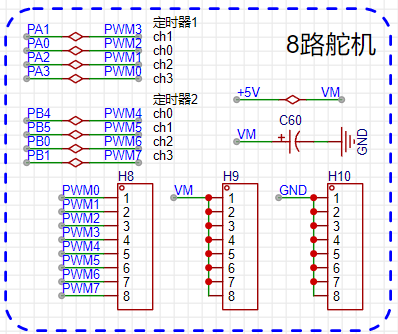
8路PWM来控制舵机转动,需要用到timer1和timer2。驱动封装
```cifndef _BSP_DOG_STEERING_H
define _BSP_DOG_STEERING_H
include “gd32f4xx.h”
include “systick.h”
//PWM周期:1ms PWM频率:1000hz //预分频:10 1s: 240 000 000 pwm周期计数: 240 000 000/10000=24000
define TIMER_PRESCALER (240 - 1)
//pwm周期计数
define TIMER_PERIOD (20000 - 1)
//PWM0
define PWM0_RCU RCU_GPIOA
define PWM0_PORT GPIOA
define PWM0_PIN GPIO_PIN_3
define PWM0_AF GPIO_AF_1
define PWM0_CH TIMER_CH_3
//PWM1
define PWM1_RCU RCU_GPIOA
define PWM1_PORT GPIOA
define PWM1_PIN GPIO_PIN_2
define PWM1_AF GPIO_AF_1
define PWM1_CH TIMER_CH_2
//PWM2
define PWM2_RCU RCU_GPIOA
define PWM2_PORT GPIOA
define PWM2_PIN GPIO_PIN_0
define PWM2_AF GPIO_AF_1
define PWM2_CH TIMER_CH_0
//PWM3
define PWM3_RCU RCU_GPIOA
define PWM3_PORT GPIOA
define PWM3_PIN GPIO_PIN_1
define PWM3_AF GPIO_AF_1
define PWM3_CH TIMER_CH_1
//PWM4
define PWM4_RCU RCU_GPIOB
define PWM4_PORT GPIOB
define PWM4_PIN GPIO_PIN_4
define PWM4_AF GPIO_AF_2
define PWM4_CH TIMER_CH_0
//PWM5
define PWM5_RCU RCU_GPIOB
define PWM5_PORT GPIOB
define PWM5_PIN GPIO_PIN_5
define PWM5_AF GPIO_AF_2
define PWM5_CH TIMER_CH_1
//PWM6
define PWM6_RCU RCU_GPIOB
define PWM6_PORT GPIOB
define PWM6_PIN GPIO_PIN_0
define PWM6_AF GPIO_AF_2
define PWM6_CH TIMER_CH_2
//PWM7
define PWM7_RCU RCU_GPIOB
define PWM7_PORT GPIOB
define PWM7_PIN GPIO_PIN_1
define PWM7_AF GPIO_AF_2
define PWM7_CH TIMER_CH_3
//舵机的角度偏差
define a1 5
define a2 0
define a3 5
define a4 0
define a5 5
define a6 0
define a7 5
define a8 5
void bsp_dog_config(void); //控制每个舵机转动角度 void bsp_pwm0_angle(float angle); void bsp_pwm1_angle(float angle); void bsp_pwm2_angle(float angle); void bsp_pwm3_angle(float angle); void bsp_pwm4_angle(float angle); void bsp_pwm5_angle(float angle); void bsp_pwm6_angle(float angle); void bsp_pwm7_angle(float angle); //给定8个舵机角度 void bsp_dog_angles(double steering_angles[8]); //狗安装角度 void dog_install_angle(void);
endif
```c#include "bsp_dog_steering.h"static void timer1_config(void){/*************** GPIO config **************///PA3rcu_periph_clock_enable(PWM0_RCU);gpio_mode_set(PWM0_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM0_PIN);gpio_output_options_set(PWM0_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM0_PIN);gpio_af_set(PWM0_PORT, PWM0_AF, PWM0_PIN);//PA2rcu_periph_clock_enable(PWM1_RCU);gpio_mode_set(PWM1_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM1_PIN);gpio_output_options_set(PWM1_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM1_PIN);gpio_af_set(PWM1_PORT, PWM1_AF, PWM1_PIN);//PA0rcu_periph_clock_enable(PWM2_RCU);gpio_mode_set(PWM2_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM2_PIN);gpio_output_options_set(PWM2_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM2_PIN);gpio_af_set(PWM2_PORT, PWM2_AF, PWM2_PIN);//PA1rcu_periph_clock_enable(PWM3_RCU);gpio_mode_set(PWM3_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM3_PIN);gpio_output_options_set(PWM3_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM3_PIN);gpio_af_set(PWM3_PORT, PWM3_AF, PWM3_PIN);/*************** Timer config *************/// 时钟配置rcu_periph_clock_enable(RCU_TIMER1);// 复位定时器timer_deinit(TIMER1);// 倍频配置rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);// 初始化定时器timer_parameter_struct tps;timer_struct_para_init(&tps);tps.prescaler = TIMER_PRESCALER; // 分频计数 240 000 000 预分频:10000 1s:24000tps.period = TIMER_PERIOD; // 周期计数 1s//定时器初始化timer_init(TIMER1, &tps);// pwm0timer_oc_parameter_struct tops;timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER1, PWM0_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER1, PWM0_CH, TIMER_OC_MODE_PWM0);// pwm1timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER1, PWM1_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER1, PWM1_CH, TIMER_OC_MODE_PWM0);// pwm2timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER1, PWM2_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER1, PWM2_CH, TIMER_OC_MODE_PWM0);// pwm3timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER1, PWM3_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER1, PWM3_CH, TIMER_OC_MODE_PWM0);// 初始化timer_enable(TIMER1);}static void timer2_config(void){/*************** GPIO config **************///PB4rcu_periph_clock_enable(PWM4_RCU);gpio_mode_set(PWM4_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM4_PIN);gpio_output_options_set(PWM4_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM4_PIN);gpio_af_set(PWM4_PORT, PWM4_AF, PWM4_PIN);//PB5rcu_periph_clock_enable(PWM5_RCU);gpio_mode_set(PWM5_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM5_PIN);gpio_output_options_set(PWM5_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM5_PIN);gpio_af_set(PWM5_PORT, PWM5_AF, PWM5_PIN);//PB0rcu_periph_clock_enable(PWM6_RCU);gpio_mode_set(PWM6_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM6_PIN);gpio_output_options_set(PWM6_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM6_PIN);gpio_af_set(PWM6_PORT, PWM6_AF, PWM6_PIN);//PB1rcu_periph_clock_enable(PWM7_RCU);gpio_mode_set(PWM7_PORT, GPIO_MODE_AF, GPIO_PUPD_NONE, PWM7_PIN);gpio_output_options_set(PWM7_PORT, GPIO_OTYPE_PP, GPIO_OSPEED_MAX, PWM7_PIN);gpio_af_set(PWM7_PORT, PWM7_AF, PWM7_PIN);/*************** Timer config *************/// 时钟配置rcu_periph_clock_enable(RCU_TIMER2);// 复位定时器timer_deinit(TIMER2);// 倍频配置rcu_timer_clock_prescaler_config(RCU_TIMER_PSC_MUL4);// 初始化定时器timer_parameter_struct tps;timer_struct_para_init(&tps);tps.prescaler = TIMER_PRESCALER; // 分频计数 240 000 000 预分频:10000 1s:24000tps.period = TIMER_PERIOD; // 周期计数 1s//定时器初始化timer_init(TIMER2, &tps);// pwm4timer_oc_parameter_struct tops;timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER2, PWM4_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER2, PWM4_CH, TIMER_OC_MODE_PWM0);// pwm5timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER2, PWM5_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER2, PWM5_CH, TIMER_OC_MODE_PWM0);// pwm6timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER2, PWM6_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER2, PWM6_CH, TIMER_OC_MODE_PWM0);// pwm7timer_channel_output_struct_para_init(&tops);//输出OP的PWMtops.outputstate = TIMER_CCX_ENABLE;timer_channel_output_config(TIMER2, PWM7_CH, &tops);// 输出模式配置 TIMER_OC_MODE_PWM0有效点平是高电平timer_channel_output_mode_config(TIMER2, PWM7_CH, TIMER_OC_MODE_PWM0);// 初始化timer_enable(TIMER2);}void bsp_dog_config(void){timer1_config();timer2_config();}static void pwm0_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER1, PWM0_CH, pulse);}static void pwm1_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER1, PWM1_CH, pulse);}static void pwm2_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER1, PWM2_CH, pulse);}static void pwm3_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER1, PWM3_CH, pulse);}static void pwm4_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER2, PWM4_CH, pulse);}static void pwm5_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER2, PWM5_CH, pulse);}static void pwm6_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER2, PWM6_CH, pulse);}static void pwm7_update(float duty) {//0-100//10uint32_t pulse = (uint32_t)(duty*TIMER_PERIOD/100);// 配置输出的占空比 占空比 计数值timer_channel_output_pulse_value_config(TIMER2, PWM7_CH, pulse);}void bsp_pwm0_angle(float angle){pwm0_update(2.5+(angle+a1)*10.0/180.0);}void bsp_pwm1_angle(float angle){pwm1_update(2.5+(angle+a2)*10.0/180.0);}void bsp_pwm2_angle(float angle){pwm2_update(2.5+(angle+a3)*10.0/180.0);}void bsp_pwm3_angle(float angle){pwm3_update(2.5+(angle+a4)*10.0/180.0);}void bsp_pwm4_angle(float angle){pwm4_update(2.5+(angle+a5)*10.0/180.0);}void bsp_pwm5_angle(float angle){pwm5_update(2.5+(angle+a6)*10.0/180.0);}void bsp_pwm6_angle(float angle){pwm6_update(2.5+(angle+a7)*10.0/180.0);}void bsp_pwm7_angle(float angle){pwm7_update(2.5+(angle+a8)*10.0/180.0);}//给定8个舵机角度void bsp_dog_angles(double steering_angles[8]){bsp_pwm0_angle(steering_angles[0]);bsp_pwm1_angle(steering_angles[1]);bsp_pwm2_angle(steering_angles[2]);bsp_pwm3_angle(steering_angles[3]);bsp_pwm4_angle(steering_angles[4]);bsp_pwm5_angle(steering_angles[5]);bsp_pwm6_angle(steering_angles[6]);bsp_pwm7_angle(steering_angles[7]);}//狗的安装角度void dog_install_angle(void){bsp_pwm0_angle(90);bsp_pwm1_angle(0);bsp_pwm2_angle(90);bsp_pwm3_angle(0);bsp_pwm4_angle(0);bsp_pwm5_angle(90);bsp_pwm6_angle(0);bsp_pwm7_angle(90);}

若有收获,就点个赞吧
0 人点赞
