正解和逆解
运动学正解
已知:大腿、小腿的角度
求:足端坐标
运动学逆解
已知:足端坐标
求:大腿、小腿的角度
余弦定理
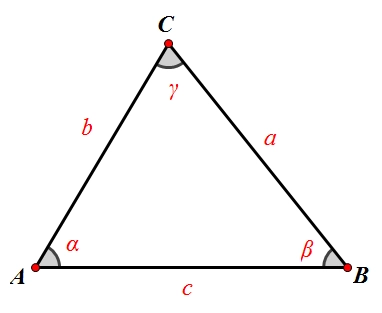
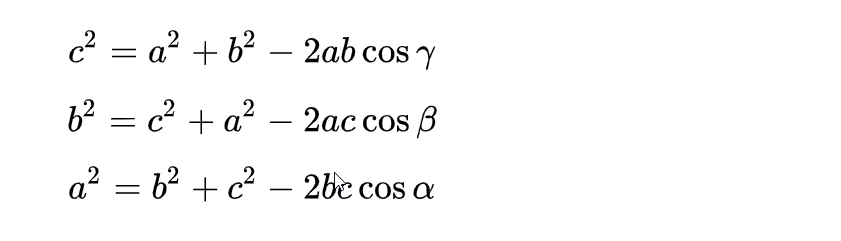
解算过程
下图是狗的一条腿部。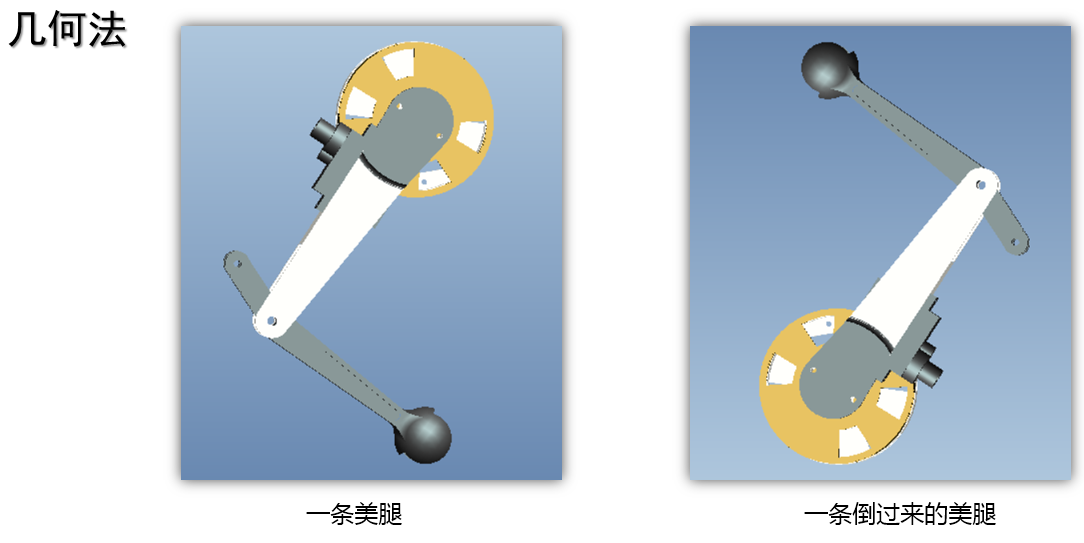
机器狗的腿部按图中的位置放置(把腿部倒过来),在腿部所在平面作一个坐标系,如下图所示。大腿和x轴形成的夹角为\theta _1θ1 (大腿的角度),大腿延长线和小腿形成的夹角为$\theta _2θ2$ (小腿的角度)。用几何的方法来求解。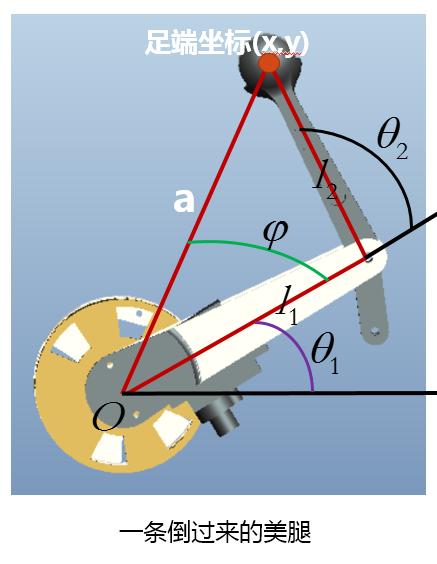
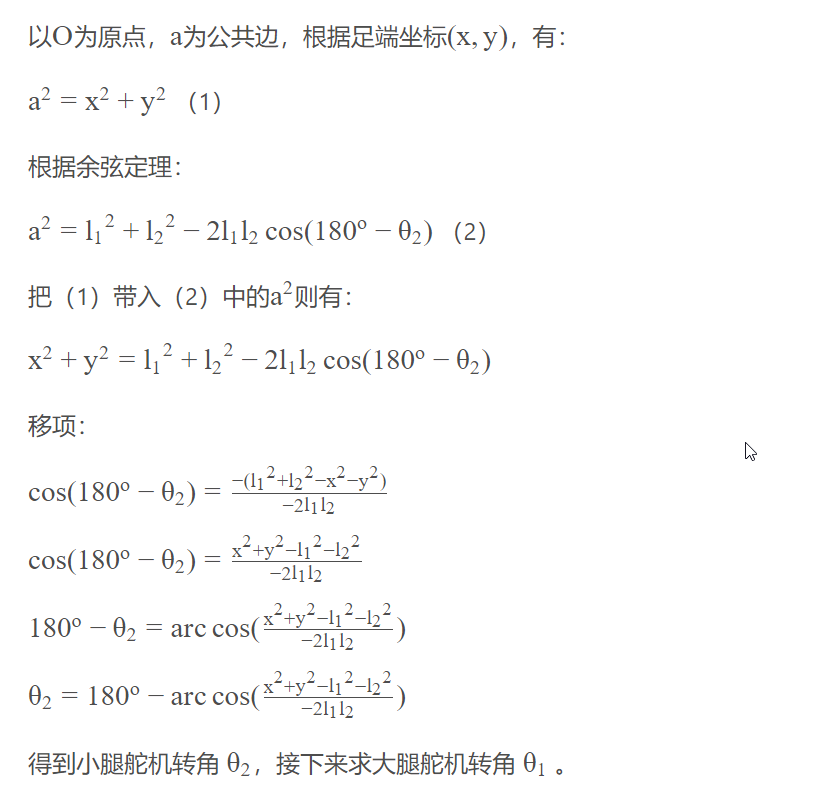
求解小腿的角度
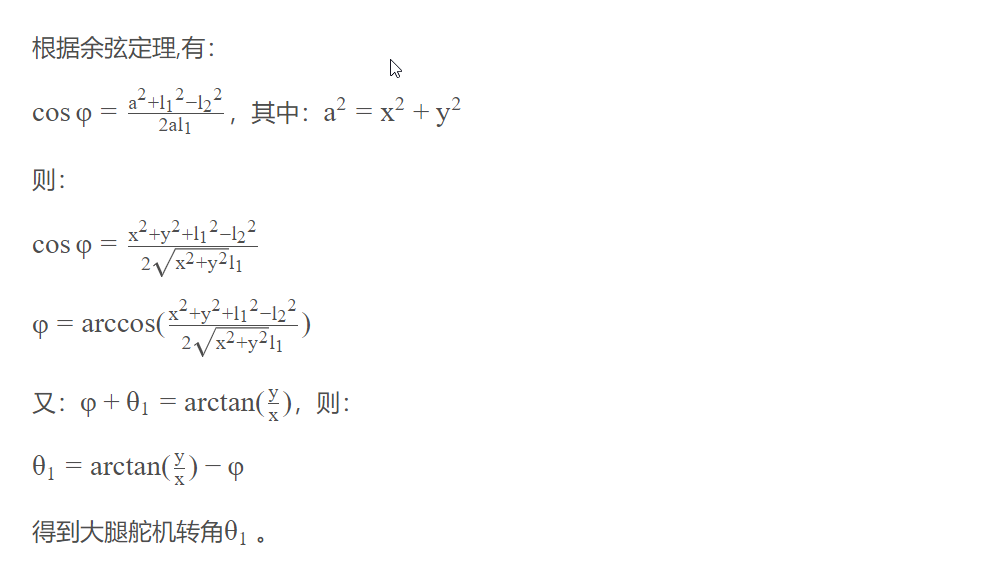
求解大腿的角度

若有收获,就点个赞吧
0 人点赞
