可视化:https://github.com/HuangCongQing/Point-Clouds-Visualization
示例:https://pcl.readthedocs.io/projects/tutorials/en/latest/#visualization
类/对象/函数:https://pointcloudlibrary.github.io/documentation/group__visualization.html
代码:
教程中给出了7个例子,分别是
- 点云的可视化
这部分是我们要着重讨论的内容,毕竟点云是PCL的重点。- 扫描图(range images)的可视化
所谓range image,指的是从一个点云逆推出的深度图。这部分内容暂不做介绍,有兴趣的可以参考官方教程。- PCL可视化器(PCLVisualizer)
这部分我们将在下面详细讨论。PCLPlotter
使用PCL画图表的工具——我想你使用PCL不是为了干这个的。- 可视化概述
一个关于PCL可视化的简介,不理解为什么它出现在倒数的位置。- [在Qt中使用可视化&带颜色点云]
这里是两个在Qt中使用可视化的介绍,略过不谈
此模块个人代码:https://github.com/HuangCongQing/pcl-learning/tree/master/15visualization
1 PCL 可视化
- 这里用到的主要的类是
CloudViewer,是一个简单的点云可视化工具。 - CloudViewer不可用于多线程程序,参见相关文档。
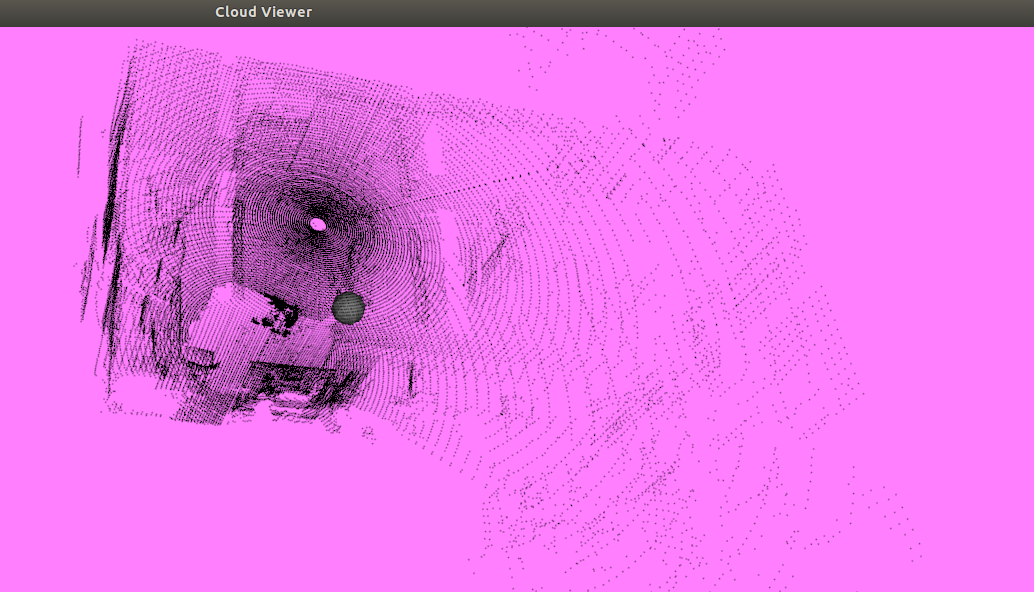
**CloudViewer**通过**showCloud**方法接收一个点云指针,并且在这个成员函数执行过后,可视化的方框就应该已经出现了。后面的while循环保持程序不会关闭// 最简单的一个例子#include <pcl/visualization/cloud_viewer.h>//...voidfoo (){pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud;//... populate cloudpcl::visualization::CloudViewer viewer ("Simple Cloud Viewer");viewer.showCloud (cloud);while (!viewer.wasStopped ()){}}
class pcl::visualization::CloudViewer
类CloudViewer实现创建点云可视化的窗口,以及相关的可视化功能
| Public Member Functions | |
|---|---|
| CloudViewer (const std::string &window_name) 构建可视化点云窗口,窗口名为window_name |
|
| ~CloudViewer () 注销窗口相关资源 |
|
| void | showCloud (const ColorCloud::ConstPtr &cloud, const std::string &cloudname=”cloud”) |
| 可视化窗口显示cloud对应的点云,考虑到多个点云用键值cloudname来限定是哪一个点云 | |
| bool | wasStopped (int millis_to_wait=1) |
| 判断用户是否已经关闭窗口,如果是则需要注销窗口 | |
| void | runOnVisualizationThread (VizCallable x, const std::string &key=”callable”) |
| 在窗口运行期间处理x的回调函数,key为键值标识此回调函数,知道窗口关闭 | |
| void | runOnVisualizationThreadOnce (VizCallable x) |
| 值调用回调函数一次 | |
| void | removeVisualizationCallable (const std::string &key=”callable”) |
| 删除key对应的回调函数 | |
| boost::signals2::connection | registerKeyboardCallback (void(callback)(const pcl::visualization::KeyboardEvent &, void ), void *cookie=NULL) |
| 注册键盘事件回调函数,cookie为回调时的参数,callback为回调函数的指针 | |
| template |
|
| boost::signals2::connection | registerKeyboardCallback (void(T::callback)(const pcl::visualization::KeyboardEvent &, void ), T &instance, void *cookie=NULL) |
| 同上,其中的instance 指向是实现该回到函数的对象 |
代码实现
创建文件:cloud_viewer.cpp
准备资源:../room_scan1.pcd
编译执行:./cloud_viewer
个人代码:15visualization可视化
/*
* @Description: PCL 可视化入门:https://www.cnblogs.com/li-yao7758258/p/6442156.html
* @Author: HCQ
* @Company(School): UCAS
* @Date: 2020-10-12 09:59:01
* @LastEditors: Please set LastEditors
* @LastEditTime: 2020-11-02 22:05:15
*/
#include <pcl/visualization/cloud_viewer.h> //类cloud_viewer头文件申明
#include <iostream> //标准输入输出头文件申明
#include <pcl/io/io.h> //I/O相关头文件申明
#include <pcl/io/pcd_io.h> //PCD文件读取
/**********************************************************************************
函数是作为回调函数,在主函数中只注册一次 ,函数实现对可视化对象背景颜色的设置,添加一个圆球几何体
*********************************************************************************/
int user_data;
void viewerOneOff(pcl::visualization::PCLVisualizer &viewer)
{
viewer.setBackgroundColor(1.0, 0.5, 1.0); //设置背景颜色
pcl::PointXYZ o; //存储球的圆心位置
o.x = 1.0;
o.y = 0;
o.z = 0;
viewer.addSphere(o, 0.25, "sphere", 0); //添加圆球几何对象
std::cout << "i only run once" << std::endl;
}
/***********************************************************************************
作为回调函数,在主函数中注册后每帧显示都执行一次,函数具体实现在可视化对象中添加一个刷新显示字符串
*************************************************************************************/
void viewerPsycho(pcl::visualization::PCLVisualizer &viewer)
{
static unsigned count = 0;
std::stringstream ss;
ss << "Once per viewer loop: " << count++;
viewer.removeShape("text", 0);
viewer.addText(ss.str(), 200, 300, "text", 0); // 添加文字
//FIXME: possible race condition here:
user_data++;
}
/**************************************************************
首先加载点云文件到点云对象,并初始化可视化对象viewer,注册上面的回
调函数,执行循环直到收到关闭viewer的消息退出程序
*************************************************************/
int main()
{
// 创建点云渲染对象,导入待渲染文件
pcl::PointCloud<pcl::PointXYZRGBA>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGBA>); //声明cloud
pcl::io::loadPCDFile("../room_scan1.pcd", *cloud); //加载点云文件
//创建点云渲染句柄
pcl::visualization::CloudViewer viewer("Cloud Viewer"); //创建viewer对象
//showCloud函数是同步的,在此处等待直到渲染显示为止
viewer.showCloud(cloud);
//下面的内容是一个模板,支持用户进行更复杂的操作。
//该注册函数在可视化的时候只执行一次
viewer.runOnVisualizationThreadOnce(viewerOneOff); //只运行一次的业务逻辑可以放在viewerOneOff函数里,比如设置背景、画个三维球等等。
//该注册函数在渲染输出时每次都调用
viewer.runOnVisualizationThread(viewerPsycho); //需要每轮渲染的业务逻辑可以放在viewerPsycho
//现在的业务逻辑仅仅是完成用户数据的单调增加,此处还可以完成更多丰富的操作。
while (!viewer.wasStopped())
{
//此处可以添加其他处理
//FIXME: Note that this is running in a separate thread from viewerPsycho
//and you should guard against race conditions yourself...
user_data++;
}
return 0;
}
// 总结
// pcl_points_visualization.cpp: 定义控制台应用程序的入口点。
// #include "stdafx.h"
// #include<pcl/visualization/cloud_viewer.h>
// #include<pcl/point_cloud.h>
// #include<pcl/io/pcd_io.h>
// int main()
// {
// pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
// pcl::io::loadPCDFile("table_scene_lms400.pcd", *cloud);
// pcl::visualization::CloudViewer viewer("cloud viewer");
// viewer.showCloud(cloud);
// while (!viewer.wasStopped())
// {
// }
// return 0;
// }
输出结果
实现效果
x PCLVisualizer可视化类
https://pcl.readthedocs.io/projects/tutorials/en/latest/pcl_visualizer.html#pcl-visualizer
上面提到的
Cloudviewer只是一个简单的可视化工具,其功能只有有限的showCloud,以及注册键盘、鼠标的回调函数。更加复杂的工具是PCLVisualizer。PCLVisualizer可视化类是PCL中功能最全的可视化类,与CloudViewer可视化类相比,PCLVisualizer使用起来更为复杂,但该类具有更全面的功能,如显示法线、绘制多种形状和多个视口。本小节将通过示例代码演示PCLVisualizer可视化类的功能,从显示单个点云开始。大多数示例代码都是用于创建点云并可视化其某些特征
pcl::visualization::PCLVisualizer
| class | pcl::visualization::PCLVisualizer |
|---|---|
https://pointclouds.org/documentation/classpcl_1_1visualization_1_1_p_c_l_visualizer.html不全面
https://pointclouds.org/documentation/group__visualization.html推荐 全面
| class | PointCloudColorHandlerRGBField |
|---|---|
| RGB handler class for colors. More… |
|
| class | PointCloudColorHandlerRGBField< pcl::PCLPointCloud2 > 使用“ rgb”或“ rgba”字段中存在的数据作为每个点的颜色。 |
| class | PointCloudColorHandlerCustom |
|---|---|
| Handler for predefined user colors. More… | |
| class | PointCloudColorHandlerCustom< pcl::PCLPointCloud2 > |
| Handler for predefined user colors. More… 给定的R,G,B值将绘制每个点的颜色。 |
| pcl::visualization::PointCloudColorHandlerCustom < pcl::PCLPointCloud2 >::PointCloudColorHandlerCustom |
const PointCloudConstPtr & |
cloud, |
|---|---|---|
| double | r, | |
| double | g, | |
| double | b | |
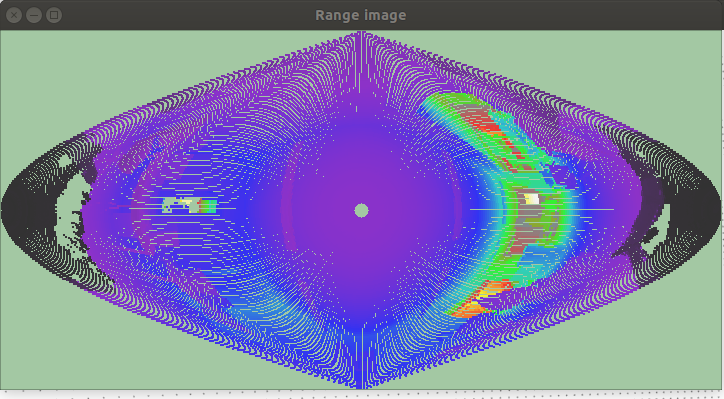
2 可视化深度图像
代码实现
创建文件:range_image_visualization.cpp
准备资源:../room_scan1.pcd
编译执行:./range_image_visualization ../room_scan1.pcd
个人代码:15visualization可视化
#include <iostream>
#include <boost/thread/thread.hpp>
#include <pcl/common/common_headers.h>
#include <pcl/range_image/range_image.h>
#include <pcl/io/pcd_io.h>
#include <pcl/visualization/range_image_visualizer.h>
#include <pcl/visualization/pcl_visualizer.h>
#include <pcl/console/parse.h>
typedef pcl::PointXYZ PointType;
// --------------------
// -----Parameters-----
// --------------------
float angular_resolution_x = 0.5f,
angular_resolution_y = angular_resolution_x;
pcl::RangeImage::CoordinateFrame coordinate_frame = pcl::RangeImage::CAMERA_FRAME;
bool live_update = false;
// --------------
// -----Help-----
// --------------
void printUsage(const char *progName)
{
std::cout << "\n\nUsage: " << progName << " [options] <scene.pcd>\n\n"
<< "Options:\n"
<< "-------------------------------------------\n"
<< "-rx <float> angular resolution in degrees (default " << angular_resolution_x << ")\n"
<< "-ry <float> angular resolution in degrees (default " << angular_resolution_y << ")\n"
<< "-c <int> coordinate frame (default " << (int)coordinate_frame << ")\n"
<< "-l live update - update the range image according to the selected view in the 3D viewer.\n"
<< "-h this help\n"
<< "\n\n";
}
void setViewerPose(pcl::visualization::PCLVisualizer &viewer, const Eigen::Affine3f &viewer_pose) //设置视角位置
{
Eigen::Vector3f pos_vector = viewer_pose * Eigen::Vector3f(0, 0, 0); //eigen
Eigen::Vector3f look_at_vector = viewer_pose.rotation() * Eigen::Vector3f(0, 0, 1) + pos_vector;
Eigen::Vector3f up_vector = viewer_pose.rotation() * Eigen::Vector3f(0, -1, 0);
viewer.setCameraPosition(pos_vector[0], pos_vector[1], pos_vector[2],
look_at_vector[0], look_at_vector[1], look_at_vector[2],
up_vector[0], up_vector[1], up_vector[2]);
}
// --------------
// -----Main-----
// --------------
int main(int argc, char **argv)
{
// --------------------------------------
// -----Parse Command Line Arguments-----
// --------------------------------------
if (pcl::console::find_argument(argc, argv, "-h") >= 0)
{
printUsage(argv[0]);
return 0;
}
if (pcl::console::find_argument(argc, argv, "-l") >= 0)
{
live_update = true;
std::cout << "Live update is on.\n";
}
if (pcl::console::parse(argc, argv, "-rx", angular_resolution_x) >= 0)
std::cout << "Setting angular resolution in x-direction to " << angular_resolution_x << "deg.\n";
if (pcl::console::parse(argc, argv, "-ry", angular_resolution_y) >= 0)
std::cout << "Setting angular resolution in y-direction to " << angular_resolution_y << "deg.\n";
int tmp_coordinate_frame;
if (pcl::console::parse(argc, argv, "-c", tmp_coordinate_frame) >= 0)
{
coordinate_frame = pcl::RangeImage::CoordinateFrame(tmp_coordinate_frame);
std::cout << "Using coordinate frame " << (int)coordinate_frame << ".\n";
}
angular_resolution_x = pcl::deg2rad(angular_resolution_x);
angular_resolution_y = pcl::deg2rad(angular_resolution_y);
// ------------------------------------------------------------------
// -----Read pcd file or create example point cloud if not given-----
// ------------------------------------------------------------------
pcl::PointCloud<PointType>::Ptr point_cloud_ptr(new pcl::PointCloud<PointType>);
pcl::PointCloud<PointType> &point_cloud = *point_cloud_ptr;
Eigen::Affine3f scene_sensor_pose(Eigen::Affine3f::Identity());
std::vector<int> pcd_filename_indices = pcl::console::parse_file_extension_argument(argc, argv, "pcd");
if (!pcd_filename_indices.empty())
{
std::string filename = argv[pcd_filename_indices[0]];
if (pcl::io::loadPCDFile(filename, point_cloud) == -1)
{
std::cout << "Was not able to open file \"" << filename << "\".\n";
printUsage(argv[0]);
return 0;
}
scene_sensor_pose = Eigen::Affine3f(Eigen::Translation3f(point_cloud.sensor_origin_[0],
point_cloud.sensor_origin_[1],
point_cloud.sensor_origin_[2])) *
Eigen::Affine3f(point_cloud.sensor_orientation_);
}
else
{
std::cout << "\nNo *.pcd file given => Genarating example point cloud.\n\n";
for (float x = -0.5f; x <= 0.5f; x += 0.01f)
{
for (float y = -0.5f; y <= 0.5f; y += 0.01f)
{
PointType point;
point.x = x;
point.y = y;
point.z = 2.0f - y;
point_cloud.points.push_back(point);
}
}
point_cloud.width = (int)point_cloud.points.size();
point_cloud.height = 1;
}
// -----------------------------------------------
// -----Create RangeImage from the PointCloud-----
// -----------------------------------------------
float noise_level = 0.0;
float min_range = 0.0f;
int border_size = 1;
boost::shared_ptr<pcl::RangeImage> range_image_ptr(new pcl::RangeImage);
pcl::RangeImage &range_image = *range_image_ptr;
range_image.createFromPointCloud(point_cloud, angular_resolution_x, angular_resolution_y,
pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, coordinate_frame, noise_level, min_range, border_size);
// --------------------------------------------
// -----Open 3D viewer and add point cloud-----
// --------------------------------------------
/*****************************************************************************************
创建3D视窗对象,将背景颜色设置为白色,添加黑色的,点云大小为1的深度图像(点云),并使用Main函数
上面定义的setViewerPose函数设置深度图像的视点参数,被注释的部分用于添加爱坐标系,并对原始点云进行可视化
*****************************************************************************************/
pcl::visualization::PCLVisualizer viewer("3D Viewer"); //定义初始化可视化对象
viewer.setBackgroundColor(1, 1, 1); //背景设置为白色
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointWithRange> range_image_color_handler(range_image_ptr, 0, 0, 0); //设置自定义颜色
viewer.addPointCloud(range_image_ptr, range_image_color_handler, "range image");
viewer.setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "range image");
//viewer.addCoordinateSystem (1.0f, "global");
//PointCloudColorHandlerCustom<PointType> point_cloud_color_handler (point_cloud_ptr, 150, 150, 150);
//viewer.addPointCloud (point_cloud_ptr, point_cloud_color_handler, "original point cloud");
viewer.initCameraParameters();
setViewerPose(viewer, range_image.getTransformationToWorldSystem());
// --------------------------
// -----Show range image-----
// --------------------------
//用以图像的方式可视化深度图像,图像的颜色取决于深度值
pcl::visualization::RangeImageVisualizer range_image_widget("Range image");
range_image_widget.showRangeImage(range_image); //图像可视化方式显示深度图像
//--------------------
// -----Main loop-----
//--------------------
while (!viewer.wasStopped()) //启动主循环以保证可视化代码的有效性,直到可视化窗口关闭
{
range_image_widget.spinOnce(); //用于处理深度图像可视化类的当前事件
viewer.spinOnce(); //用于处理3D窗口当前的事件此外还可以随时更新2D深度图像,以响应可视化窗口中的当前视角,这通过命令行-1来激活
pcl_sleep(0.01);
//首先从窗口中得到当前的观察位置,然后创建对应视角的深度图像,并在图像显示插件中显示
if (live_update)
{
scene_sensor_pose = viewer.getViewerPose();
range_image.createFromPointCloud(point_cloud, angular_resolution_x, angular_resolution_y,
pcl::deg2rad(360.0f), pcl::deg2rad(180.0f),
scene_sensor_pose, pcl::RangeImage::LASER_FRAME, noise_level, min_range, border_size);
range_image_widget.showRangeImage(range_image);
}
}
}
输出结果
实现效果

若有收获,就点个赞吧
0 人点赞
