- 介绍
- Plane model segmentation 平面分割">1 Plane model segmentation 平面分割
- Cylinder model segmentation 圆柱体分割">2 Cylinder model segmentation 圆柱体分割
- Euclidean Cluster Extraction 欧几里得簇提取">3 Euclidean Cluster Extraction 欧几里得簇提取
- 代码实现
- 输出结果
- 实现效果
- Region growing segmentation 区域增长细分">4 Region growing segmentation 区域增长细分
- Color-based region growing segmentation 基于颜色的区域增长分割">5 Color-based region growing segmentation 基于颜色的区域增长分割
- Min-Cut Based Segmentation基于最小剪切的分割">6 Min-Cut Based Segmentation基于最小剪切的分割
- Conditional Euclidean Clustering 条件欧几里得聚类">7 Conditional Euclidean Clustering 条件欧几里得聚类
- Difference of Normals Based Segmentation 基于法线的分割差异">8 Difference of Normals Based Segmentation 基于法线的分割差异
- Clustering of Pointclouds into Supervoxels - Theoretical primer 点云聚集成超级体素-理论底漆">9 Clustering of Pointclouds into Supervoxels - Theoretical primer 点云聚集成超级体素-理论底漆
- Identifying ground returns using ProgressiveMorphologicalFilter segmentation 使用ProgressiveMorphologicalFilter细分识别地面收益">10 Identifying ground returns using ProgressiveMorphologicalFilter segmentation 使用ProgressiveMorphologicalFilter细分识别地面收益
- Filtering a PointCloud using ModelOutlierRemoval 使用ModelOutlierRemoval过滤PointCloud">11 Filtering a PointCloud using ModelOutlierRemoval 使用ModelOutlierRemoval过滤PointCloud
https://pcl.readthedocs.io/projects/tutorials/en/latest/#segmentation
https://pointclouds.org/documentation/group__segmentation.html
PCL中分割_欧式分割(1)
PCL中分割方法的介绍(2)
PCL中分割方法的介绍(3)
PCL点云分割(1)官方文档tutorials 前三示例
PCL点云分割(2)
PCL点云分割(3)
此模块个人代码:https://github.com/HuangCongQing/pcl-learning/tree/master/12segmentation
介绍
点云分割是根据空间,几何和纹理等特征对点云进行划分,使得同一划分内的点云拥有相似的特征,点云的有效分割往往是许多应用的前提,例如逆向工作,CAD领域对零件的不同扫描表面进行分割,然后才能更好的进行空洞修复曲面重建,特征描述和提取,进而进行基于3D内容的检索,组合重用等。
官方tutorials
- Plane model segmentation 平面分割done
- Cylinder model segmentation 圆柱体分割done
- Euclidean Cluster Extraction 欧几里得簇提取done欧式聚类提取
- Region growing segmentation 区域增长细分
- Color-based region growing segmentation 基于颜色的区域增长分割
- Min-Cut Based Segmentation基于最小剪切的分割
- Conditional Euclidean Clustering 条件欧几里得聚类
- Difference of Normals Based Segmentation 基于法线的分割差异
- Clustering of Pointclouds into Supervoxels - Theoretical primer 点云聚集成超级体素-理论底漆
- Identifying ground returns using ProgressiveMorphologicalFilter segmentation 使用ProgressiveMorphologicalFilter细分识别地面收益
- Filtering a PointCloud using ModelOutlierRemoval 使用ModelOutlierRemoval过滤PointCloud
1 Plane model segmentation 平面分割
代码实现
创建文件:planar_segmentation.cpp
准备资源:无
编译执行:./planar_segmentation
个人代码:12segmentation分割
/** @Description: 用一组点云数据做简单的平面的分割:https://www.cnblogs.com/li-yao7758258/p/6496664.html* @Author: HCQ* @Company(School): UCAS* @Date: 2020-10-13 16:33:43* @LastEditors: HCQ* @LastEditTime: 2020-10-13 17:32:41*/#include <iostream>#include <pcl/ModelCoefficients.h>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/sample_consensus/method_types.h> //随机参数估计方法头文件#include <pcl/sample_consensus/model_types.h> //模型定义头文件#include <pcl/segmentation/sac_segmentation.h> //基于采样一致性分割的类的头文件int main(int argc, char **argv){pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);// 填充点云cloud->width = 15;cloud->height = 1;cloud->points.resize(cloud->width * cloud->height);// 生成数据,采用随机数填充点云的x,y坐标,都处于z为1的平面上for (size_t i = 0; i < cloud->points.size(); ++i){cloud->points[i].x = 1024 * rand() / (RAND_MAX + 1.0f);cloud->points[i].y = 1024 * rand() / (RAND_MAX + 1.0f);cloud->points[i].z = 1.0;}// 设置几个局外点,即重新设置几个点的z值,使其偏离z为1的平面cloud->points[0].z = 2.0;cloud->points[3].z = -2.0;cloud->points[6].z = 4.0;std::cerr << "Point cloud data: " << cloud->points.size() << " points" << std::endl; //打印for (size_t i = 0; i < cloud->points.size(); ++i)std::cerr << " " << cloud->points[i].x << " "<< cloud->points[i].y << " "<< cloud->points[i].z << std::endl;//创建分割时所需要的模型系数对象,coefficients及存储内点的点索引集合对象inlierspcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);pcl::PointIndices::Ptr inliers(new pcl::PointIndices);// 创建分割对象pcl::SACSegmentation<pcl::PointXYZ> seg;// 可选择配置,设置模型系数需要优化seg.setOptimizeCoefficients(true);// 必要的配置,设置分割的模型类型,所用的随机参数估计方法,距离阀值,输入点云seg.setModelType(pcl::SACMODEL_PLANE); //设置模型类型seg.setMethodType(pcl::SAC_RANSAC); //设置随机采样一致性方法类型seg.setDistanceThreshold(0.01); //设定距离阀值,距离阀值决定了点被认为是局内点是必须满足的条件//表示点到估计模型的距离最大值,seg.setInputCloud(cloud);//引发分割实现,存储分割结果到点几何inliers及存储平面模型的系数coefficientsseg.segment(*inliers, *coefficients);if (inliers->indices.size() == 0){PCL_ERROR("Could not estimate a planar model for the given dataset.");return (-1);}//打印出平面模型std::cerr << "Model coefficients: " << coefficients->values[0] << " "<< coefficients->values[1] << " "<< coefficients->values[2] << " "<< coefficients->values[3] << std::endl;std::cerr << "Model inliers: " << inliers->indices.size() << std::endl;for (size_t i = 0; i < inliers->indices.size(); ++i)std::cerr << inliers->indices[i] << " " << cloud->points[inliers->indices[i]].x << " "<< cloud->points[inliers->indices[i]].y << " "<< cloud->points[inliers->indices[i]].z << std::endl;return (0);}
输出结果
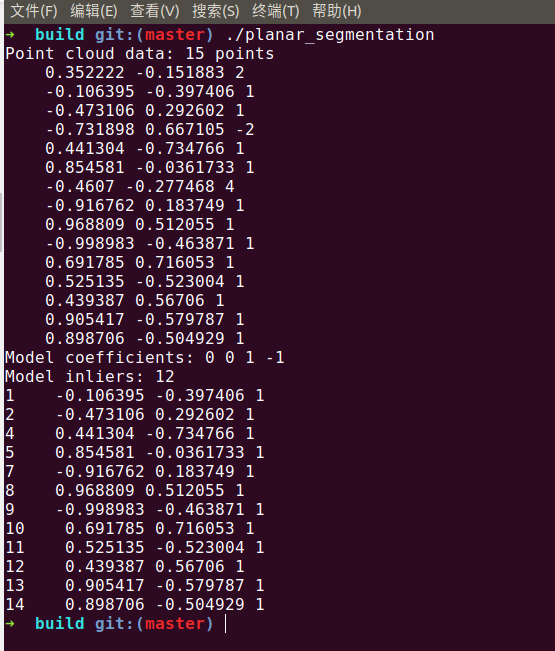
实现效果
无可视图
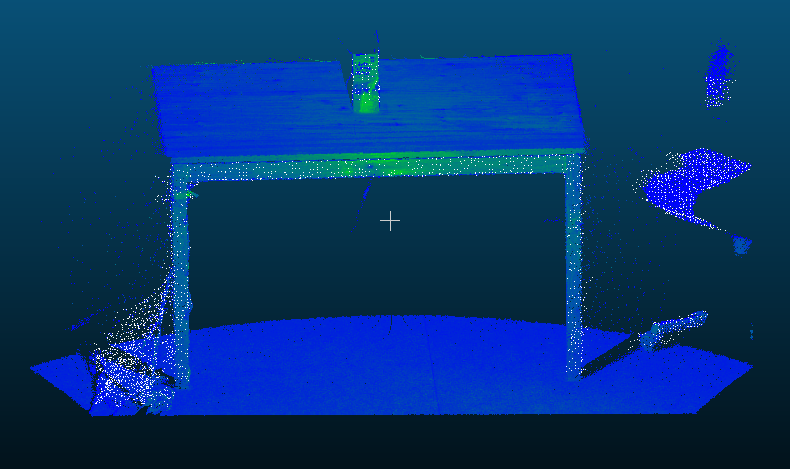
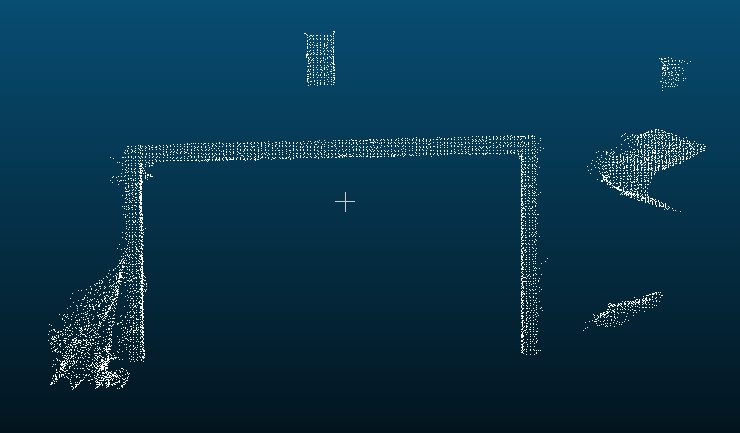
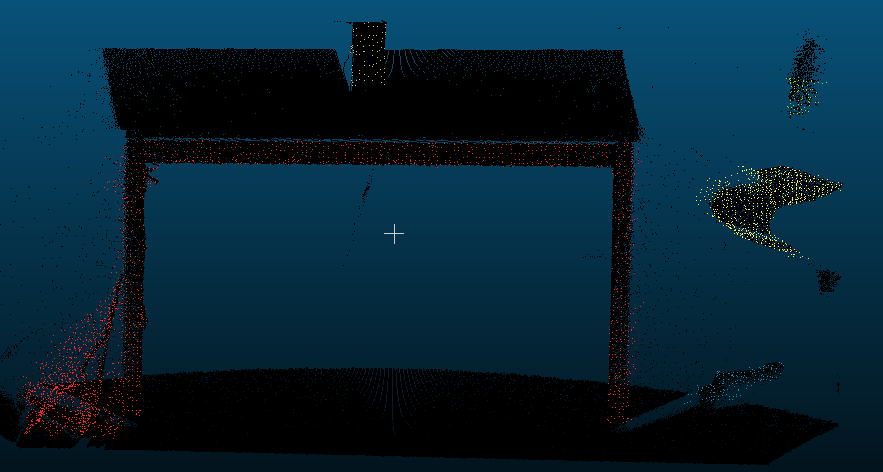
2 Cylinder model segmentation 圆柱体分割
实现圆柱体模型的分割:采用随机采样一致性估计从带有噪声的点云中提取一个圆柱体模型。
/** @Description: 实现圆柱体模型的分割:采用随机采样一致性估计从带有噪声的点云中提取一个圆柱体模型。:https://www.cnblogs.com/li-yao7758258/p/6496664.html* @Author: HCQ* @Company(School): UCAS* @Date: 2020-10-13 16:33:43* @LastEditors: HCQ* @LastEditTime: 2020-10-14 18:41:30*/#include <pcl/ModelCoefficients.h>#include <pcl/io/pcd_io.h>#include <pcl/point_types.h>#include <pcl/filters/extract_indices.h>#include <pcl/filters/passthrough.h>#include <pcl/features/normal_3d.h>#include <pcl/sample_consensus/method_types.h>#include <pcl/sample_consensus/model_types.h>#include <pcl/segmentation/sac_segmentation.h>#include <pcl/visualization/pcl_visualizer.h> // 可视化typedef pcl::PointXYZ PointT;int main(int argc, char **argv){// All the objects neededpcl::PCDReader reader; //PCD文件读取对象pcl::PassThrough<PointT> pass; //直通滤波对象pcl::NormalEstimation<PointT, pcl::Normal> ne; //法线估计对象pcl::SACSegmentationFromNormals<PointT, pcl::Normal> seg; //分割对象pcl::PCDWriter writer; //PCD文件读取对象pcl::ExtractIndices<PointT> extract; //点提取对象pcl::ExtractIndices<pcl::Normal> extract_normals; ///点提取对象pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>());// Datasetspcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);pcl::PointCloud<PointT>::Ptr cloud_filtered(new pcl::PointCloud<PointT>);pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);pcl::PointCloud<PointT>::Ptr cloud_filtered2(new pcl::PointCloud<PointT>);pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2(new pcl::PointCloud<pcl::Normal>);pcl::ModelCoefficients::Ptr coefficients_plane(new pcl::ModelCoefficients), coefficients_cylinder(new pcl::ModelCoefficients);pcl::PointIndices::Ptr inliers_plane(new pcl::PointIndices), inliers_cylinder(new pcl::PointIndices);// Read in the cloud datareader.read("../table_scene_mug_stereo_textured.pcd", *cloud);std::cerr << "PointCloud has: " << cloud->points.size() << " data points." << std::endl;// 直通滤波,将Z轴不在(0,1.5)范围的点过滤掉,将剩余的点存储到cloud_filtered对象中pass.setInputCloud(cloud);pass.setFilterFieldName("z");pass.setFilterLimits(0, 1.5);pass.filter(*cloud_filtered);std::cerr << "PointCloud after filtering has: " << cloud_filtered->points.size() << " data points." << std::endl;// 过滤后的点云进行法线估计,为后续进行基于法线的分割准备数据ne.setSearchMethod(tree);ne.setInputCloud(cloud_filtered);ne.setKSearch(50);ne.compute(*cloud_normals);// Create the segmentation object for the planar model and set all the parametersseg.setOptimizeCoefficients(true);seg.setModelType(pcl::SACMODEL_NORMAL_PLANE);seg.setNormalDistanceWeight(0.1);seg.setMethodType(pcl::SAC_RANSAC);seg.setMaxIterations(100);seg.setDistanceThreshold(0.03);seg.setInputCloud(cloud_filtered);seg.setInputNormals(cloud_normals);//获取平面模型的系数和处在平面的内点seg.segment(*inliers_plane, *coefficients_plane);std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;// 从点云中抽取分割的处在平面上的点集extract.setInputCloud(cloud_filtered);extract.setIndices(inliers_plane);extract.setNegative(false);// 存储分割得到的平面上的点到点云文件pcl::PointCloud<PointT>::Ptr cloud_plane(new pcl::PointCloud<PointT>());extract.filter(*cloud_plane);std::cerr << "PointCloud representing the planar component: " << cloud_plane->points.size() << " data points." << std::endl;writer.write("table_scene_mug_stereo_textured_plane.pcd", *cloud_plane, false); // 分割得到的平面// Remove the planar inliers, extract the restextract.setNegative(true);extract.filter(*cloud_filtered2);extract_normals.setNegative(true);extract_normals.setInputCloud(cloud_normals);extract_normals.setIndices(inliers_plane);extract_normals.filter(*cloud_normals2);// Create the segmentation object for cylinder segmentation and set all the parametersseg.setOptimizeCoefficients(true); //设置对估计模型优化seg.setModelType(pcl::SACMODEL_CYLINDER); //设置分割模型为圆柱形seg.setMethodType(pcl::SAC_RANSAC); //参数估计方法seg.setNormalDistanceWeight(0.1); //设置表面法线权重系数seg.setMaxIterations(10000); //设置迭代的最大次数10000seg.setDistanceThreshold(0.05); //设置内点到模型的距离允许最大值seg.setRadiusLimits(0, 0.1); //设置估计出的圆柱模型的半径的范围seg.setInputCloud(cloud_filtered2);seg.setInputNormals(cloud_normals2);// Obtain the cylinder inliers and coefficientsseg.segment(*inliers_cylinder, *coefficients_cylinder);std::cerr << "Cylinder coefficients: " << *coefficients_cylinder << std::endl;// Write the cylinder inliers to diskextract.setInputCloud(cloud_filtered2);extract.setIndices(inliers_cylinder);extract.setNegative(false);pcl::PointCloud<PointT>::Ptr cloud_cylinder(new pcl::PointCloud<PointT>());extract.filter(*cloud_cylinder);if (cloud_cylinder->points.empty())std::cerr << "Can't find the cylindrical component." << std::endl;else{std::cerr << "PointCloud representing the cylindrical component: " << cloud_cylinder->points.size() << " data points." << std::endl;writer.write("table_scene_mug_stereo_textured_cylinder.pcd", *cloud_cylinder, false); // 分割得到的平面}// 可视化pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("three 三窗口 "));int v1(0); //设置左右窗口int v2(1);int v3(2);viewer->createViewPort(0.0, 0.0, 0.5,1.0, v1); //(Xmin,Ymin,Xmax,Ymax)设置窗口坐标viewer->createViewPort(0.5, 0.0, 1.0, 0.5, v2);viewer->createViewPort(0.5, 0.5, 1.0, 1.0, v3);pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_red(cloud, 255, 0, 0); // 显示红色点云viewer->addPointCloud(cloud, cloud_out_red, "cloud_out1", v1);pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_green(cloud, 0, 255, 0); // 显示绿色点云viewer->addPointCloud(cloud_plane, cloud_out_green, "cloud_out2", v2); // 平面pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_blue(cloud, 0, 0, 255); // 显示蓝色点云viewer->addPointCloud(cloud_cylinder, cloud_out_blue, "cloud_out3", v3); // 圆柱// 1. 阻塞式viewer->spin();// 2. 非阻塞式// while (!viewer->wasStopped())// {// viewer->spinOnce();// }return (0);}
代码实现
创建文件:cylinder_segmentation.cpp
准备资源:../table_scene_mug_stereo_textured.pcd
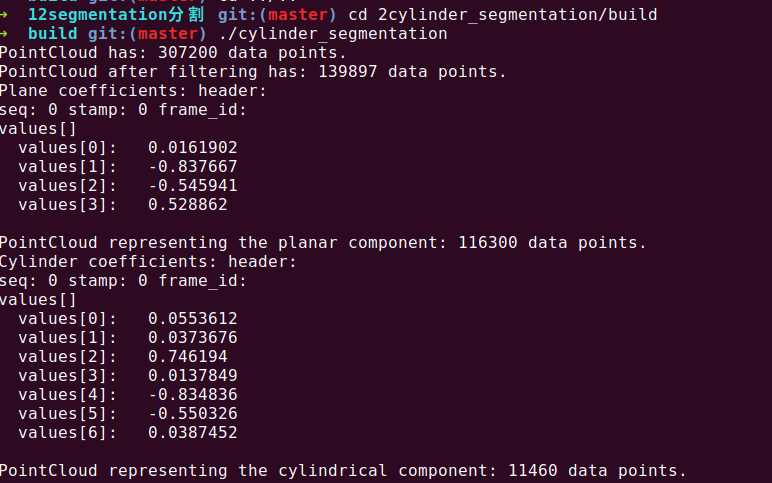
编译执行:./cylinder_segmentation
个人代码:12segmentation分割
/*
* @Description: 实现圆柱体模型的分割:采用随机采样一致性估计从带有噪声的点云中提取一个圆柱体模型。:https://www.cnblogs.com/li-yao7758258/p/6496664.html
* @Author: HCQ
* @Company(School): UCAS
* @Date: 2020-10-13 16:33:43
* @LastEditors: HCQ
* @LastEditTime: 2020-10-14 18:41:30
*/
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/passthrough.h>
#include <pcl/features/normal_3d.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/visualization/pcl_visualizer.h> // 可视化
typedef pcl::PointXYZ PointT;
int main(int argc, char **argv)
{
// All the objects needed
pcl::PCDReader reader; //PCD文件读取对象
pcl::PassThrough<PointT> pass; //直通滤波对象
pcl::NormalEstimation<PointT, pcl::Normal> ne; //法线估计对象
pcl::SACSegmentationFromNormals<PointT, pcl::Normal> seg; //分割对象
pcl::PCDWriter writer; //PCD文件读取对象
pcl::ExtractIndices<PointT> extract; //点提取对象
pcl::ExtractIndices<pcl::Normal> extract_normals; ///点提取对象
pcl::search::KdTree<PointT>::Ptr tree(new pcl::search::KdTree<PointT>());
// Datasets
pcl::PointCloud<PointT>::Ptr cloud(new pcl::PointCloud<PointT>);
pcl::PointCloud<PointT>::Ptr cloud_filtered(new pcl::PointCloud<PointT>);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals(new pcl::PointCloud<pcl::Normal>);
pcl::PointCloud<PointT>::Ptr cloud_filtered2(new pcl::PointCloud<PointT>);
pcl::PointCloud<pcl::Normal>::Ptr cloud_normals2(new pcl::PointCloud<pcl::Normal>);
pcl::ModelCoefficients::Ptr coefficients_plane(new pcl::ModelCoefficients), coefficients_cylinder(new pcl::ModelCoefficients);
pcl::PointIndices::Ptr inliers_plane(new pcl::PointIndices), inliers_cylinder(new pcl::PointIndices);
// Read in the cloud data
reader.read("../table_scene_mug_stereo_textured.pcd", *cloud);
std::cerr << "PointCloud has: " << cloud->points.size() << " data points." << std::endl;
// 直通滤波,将Z轴不在(0,1.5)范围的点过滤掉,将剩余的点存储到cloud_filtered对象中
pass.setInputCloud(cloud);
pass.setFilterFieldName("z");
pass.setFilterLimits(0, 1.5);
pass.filter(*cloud_filtered);
std::cerr << "PointCloud after filtering has: " << cloud_filtered->points.size() << " data points." << std::endl;
// 过滤后的点云进行法线估计,为后续进行基于法线的分割准备数据
ne.setSearchMethod(tree);
ne.setInputCloud(cloud_filtered);
ne.setKSearch(50);
ne.compute(*cloud_normals);
// Create the segmentation object for the planar model and set all the parameters
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_NORMAL_PLANE);
seg.setNormalDistanceWeight(0.1);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setMaxIterations(100);
seg.setDistanceThreshold(0.03);
seg.setInputCloud(cloud_filtered);
seg.setInputNormals(cloud_normals);
//获取平面模型的系数和处在平面的内点
seg.segment(*inliers_plane, *coefficients_plane);
std::cerr << "Plane coefficients: " << *coefficients_plane << std::endl;
// 从点云中抽取分割的处在平面上的点集
extract.setInputCloud(cloud_filtered);
extract.setIndices(inliers_plane);
extract.setNegative(false);
// 存储分割得到的平面上的点到点云文件
pcl::PointCloud<PointT>::Ptr cloud_plane(new pcl::PointCloud<PointT>());
extract.filter(*cloud_plane);
std::cerr << "PointCloud representing the planar component: " << cloud_plane->points.size() << " data points." << std::endl;
writer.write("table_scene_mug_stereo_textured_plane.pcd", *cloud_plane, false); // 分割得到的平面
// Remove the planar inliers, extract the rest
extract.setNegative(true);
extract.filter(*cloud_filtered2);
extract_normals.setNegative(true);
extract_normals.setInputCloud(cloud_normals);
extract_normals.setIndices(inliers_plane);
extract_normals.filter(*cloud_normals2);
// Create the segmentation object for cylinder segmentation and set all the parameters
seg.setOptimizeCoefficients(true); //设置对估计模型优化
seg.setModelType(pcl::SACMODEL_CYLINDER); //设置分割模型为圆柱形
seg.setMethodType(pcl::SAC_RANSAC); //参数估计方法
seg.setNormalDistanceWeight(0.1); //设置表面法线权重系数
seg.setMaxIterations(10000); //设置迭代的最大次数10000
seg.setDistanceThreshold(0.05); //设置内点到模型的距离允许最大值
seg.setRadiusLimits(0, 0.1); //设置估计出的圆柱模型的半径的范围
seg.setInputCloud(cloud_filtered2);
seg.setInputNormals(cloud_normals2);
// Obtain the cylinder inliers and coefficients
seg.segment(*inliers_cylinder, *coefficients_cylinder);
std::cerr << "Cylinder coefficients: " << *coefficients_cylinder << std::endl;
// Write the cylinder inliers to disk
extract.setInputCloud(cloud_filtered2);
extract.setIndices(inliers_cylinder);
extract.setNegative(false);
pcl::PointCloud<PointT>::Ptr cloud_cylinder(new pcl::PointCloud<PointT>());
extract.filter(*cloud_cylinder);
if (cloud_cylinder->points.empty())
std::cerr << "Can't find the cylindrical component." << std::endl;
else
{
std::cerr << "PointCloud representing the cylindrical component: " << cloud_cylinder->points.size() << " data points." << std::endl;
writer.write("table_scene_mug_stereo_textured_cylinder.pcd", *cloud_cylinder, false); // 分割得到的平面
}
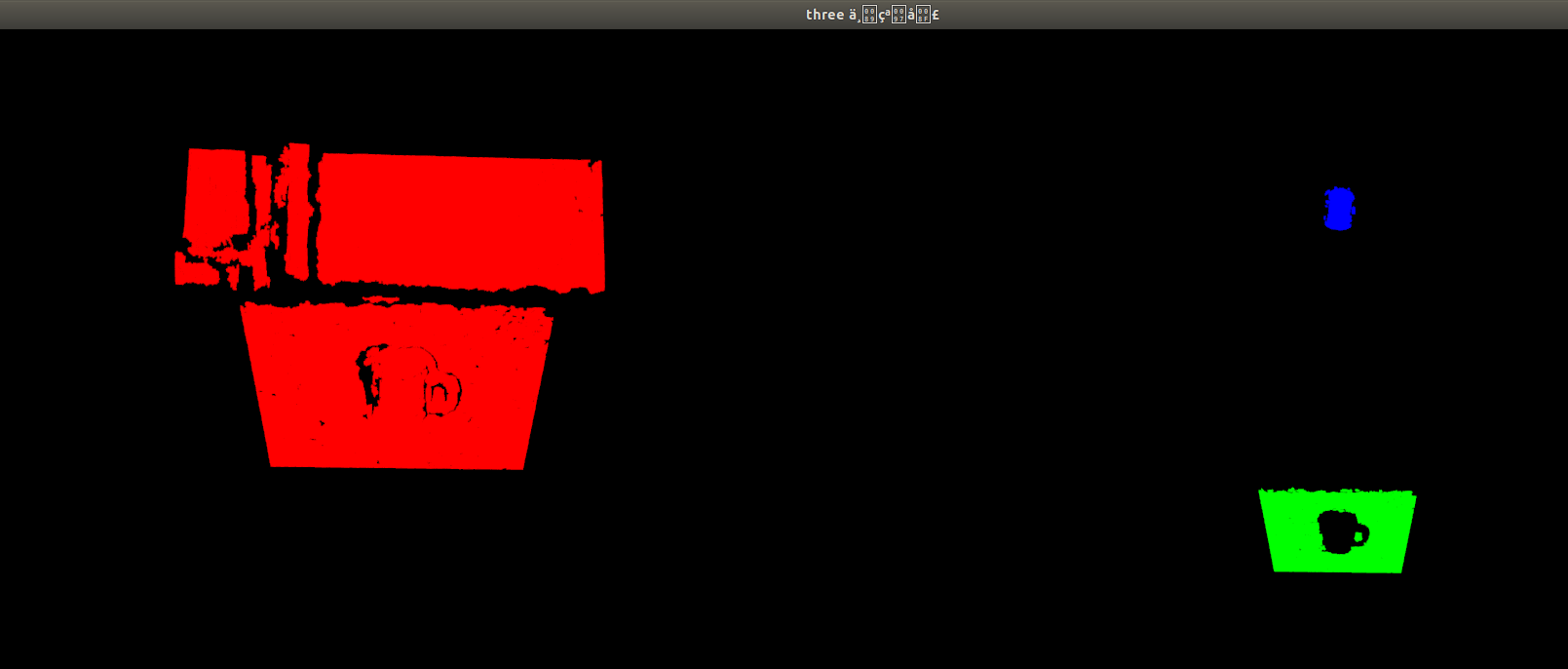
// 可视化
pcl::visualization::PCLVisualizer::Ptr viewer(new pcl::visualization::PCLVisualizer("three 三窗口 "));
int v1(0); //设置左右窗口
int v2(1);
int v3(2);
viewer->createViewPort(0.0, 0.0, 0.5,1.0, v1); //(Xmin,Ymin,Xmax,Ymax)设置窗口坐标
viewer->createViewPort(0.5, 0.0, 1.0, 0.5, v2);
viewer->createViewPort(0.5, 0.5, 1.0, 1.0, v3);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_red(cloud, 255, 0, 0); // 显示红色点云
viewer->addPointCloud(cloud, cloud_out_red, "cloud_out1", v1);
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_green(cloud, 0, 255, 0); // 显示绿色点云
viewer->addPointCloud(cloud_plane, cloud_out_green, "cloud_out2", v2); // 平面
pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> cloud_out_blue(cloud, 0, 0, 255); // 显示蓝色点云
viewer->addPointCloud(cloud_cylinder, cloud_out_blue, "cloud_out3", v3); // 圆柱
// 1. 阻塞式
viewer->spin();
// 2. 非阻塞式
// while (!viewer->wasStopped())
// {
// viewer->spinOnce();
// }
return (0);
}
输出结果
实现效果
3 Euclidean Cluster Extraction 欧几里得簇提取
(3)PCL中实现欧式聚类提取。对三维点云组成的场景进行分割
为了更切合实际的应用我会在这些基本的程序的基础上,进行与实际结合的实例,因为这些都是官方给的实例,我是首先学习一下,至少过一面,这样在后期结合实际应用的过程中会更加容易一点。(因为我也是一边学习,然后回头再在基础上进行更修)
pcl::VoxelGrid (filters)
| class | pcl::VoxelGrid< PointT > |
|---|---|
| VoxelGrid assembles a local 3D grid over a given PointCloud, and downsamples + filters the data. More… VoxelGrid在给定的PointCloud上组装本地3D网格,并对数据进行下采样+过滤。更多… |
VoxelGrid类在输入点云数据上创建3D体素网格(将体素网格视为一组空间中的微小3D框
pcl::SACSegmentation seg; (segmentation)
| class | pcl::SACSegmentation< PointT > |
|---|---|
| SACSegmentation represents the Nodelet segmentation class for Sample Consensus methods and models, in the sense that it just creates a Nodelet wrapper for generic-purpose SAC-based segmentation. More… SACSegmentation代表样本共识方法和模型的Nodelet细分类,因为它只是为基于通用SAC的细分创建了Nodelet包装器。更多… |
|
| class | pcl::SACSegmentationFromNormals< PointT, PointNT > |
| SACSegmentationFromNormals represents the PCL nodelet segmentation class for Sample Consensus methods and models that require the use of surface normals for estimation. More… |
pcl::ExtractIndices extract;(filters)
| class | ExtractIndices |
|---|---|
| ExtractIndices extracts a set of indices from a point cloud. More… ExtractIndices从点云中提取一组索引。更多… |
|
| class | ExtractIndices< pcl::PCLPointCloud2 > |
| ExtractIndices extracts a set of indices from a point cloud. More… |
pcl::EuclideanClusterExtraction ec; //欧式聚类对象 (segmentation)
| class | pcl::EuclideanClusterExtraction< PointT > |
|---|---|
| EuclideanClusterExtraction represents a segmentation class for cluster extraction in an Euclidean sense. More…EuclideanClusterExtraction代表欧几里得意义上的群集提取的细分类别。更多 … |
代码实现
创建文件:octree_change_detection.cpp
准备资源:无
编译执行:./octree_change_detection
个人代码:12segmentation分割
/*
* @Description: PCL中实现欧式聚类提取。对三维点云组成的场景进行分割。:https://www.cnblogs.com/li-yao7758258/p/6496664.html
* @Author: HCQ
* @Company(School): UCAS
* @Date: 2020-10-13 16:33:43
* @LastEditors: Please set LastEditors
* @LastEditTime: 2020-10-18 11:48:23
*/
#include <pcl/ModelCoefficients.h>
#include <pcl/point_types.h>
#include <pcl/io/pcd_io.h>
#include <pcl/filters/extract_indices.h>
#include <pcl/filters/voxel_grid.h>
#include <pcl/features/normal_3d.h>
#include <pcl/kdtree/kdtree.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/segmentation/extract_clusters.h>
/******************************************************************************
打开点云数据,并对点云进行滤波重采样预处理,然后采用平面分割模型对点云进行分割处理
提取出点云中所有在平面上的点集,并将其存盘
******************************************************************************/
int
main (int argc, char** argv)
{
// Read in the cloud data
pcl::PCDReader reader;
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>), cloud_f (new pcl::PointCloud<pcl::PointXYZ>);
reader.read ("../table_scene_lms400.pcd", *cloud); // 点云文件
std::cout << "PointCloud before filtering has: " << cloud->points.size () << " data points." << std::endl; //*
// Create the filtering object: downsample the dataset using a leaf size of 1cm
pcl::VoxelGrid<pcl::PointXYZ> vg; // VoxelGrid类在输入点云数据上创建3D体素网格(将体素网格视为一组空间中的微小3D框
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_filtered (new pcl::PointCloud<pcl::PointXYZ>);
vg.setInputCloud (cloud); //输入
vg.setLeafSize (0.01f, 0.01f, 0.01f); // setLeafSize (float lx, float ly, float lz)
vg.filter (*cloud_filtered); //输出
std::cout << "PointCloud after filtering has: " << cloud_filtered->points.size () << " data points." << std::endl; //*滤波后
//创建平面模型分割的对象并设置参数
pcl::SACSegmentation<pcl::PointXYZ> seg;
pcl::PointIndices::Ptr inliers (new pcl::PointIndices);
pcl::ModelCoefficients::Ptr coefficients (new pcl::ModelCoefficients);
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_plane (new pcl::PointCloud<pcl::PointXYZ> ());
pcl::PCDWriter writer;
seg.setOptimizeCoefficients (true);
seg.setModelType (pcl::SACMODEL_PLANE); //分割模型
seg.setMethodType (pcl::SAC_RANSAC); //随机参数估计方法
seg.setMaxIterations (100); //最大的迭代的次数
seg.setDistanceThreshold (0.02); //设置阀值
int i=0, nr_points = (int) cloud_filtered->points.size ();
while (cloud_filtered->points.size () > 0.3 * nr_points) // 滤波停止条件
{
// Segment the largest planar component from the remaining cloud
seg.setInputCloud (cloud_filtered); // 输入
seg.segment (*inliers, *coefficients);
if (inliers->indices.size () == 0)
{
std::cout << "Could not estimate a planar model for the given dataset." << std::endl;
break;
}
pcl::ExtractIndices<pcl::PointXYZ> extract;
extract.setInputCloud (cloud_filtered);
extract.setIndices (inliers);
extract.setNegative (false);
// Get the points associated with the planar surface
extract.filter (*cloud_plane);// [平面
std::cout << "PointCloud representing the planar component: " << cloud_plane->points.size () << " data points." << std::endl;
// // 移去平面局内点,提取剩余点云
extract.setNegative (true);
extract.filter (*cloud_f);
*cloud_filtered = *cloud_f;
}
// Creating the KdTree object for the search method of the extraction
pcl::search::KdTree<pcl::PointXYZ>::Ptr tree (new pcl::search::KdTree<pcl::PointXYZ>);
tree->setInputCloud (cloud_filtered);
std::vector<pcl::PointIndices> cluster_indices;
pcl::EuclideanClusterExtraction<pcl::PointXYZ> ec; //欧式聚类对象
ec.setClusterTolerance (0.02); // 设置近邻搜索的搜索半径为2cm
ec.setMinClusterSize (100); //设置一个聚类需要的最少的点数目为100
ec.setMaxClusterSize (25000); //设置一个聚类需要的最大点数目为25000
ec.setSearchMethod (tree); //设置点云的搜索机制
ec.setInputCloud (cloud_filtered);
ec.extract (cluster_indices); //从点云中提取聚类,并将点云索引保存在cluster_indices中
//迭代访问点云索引cluster_indices,直到分割出所有聚类
int j = 0;
for (std::vector<pcl::PointIndices>::const_iterator it = cluster_indices.begin (); it != cluster_indices.end (); ++it)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud_cluster (new pcl::PointCloud<pcl::PointXYZ>);
for (std::vector<int>::const_iterator pit = it->indices.begin (); pit != it->indices.end (); ++pit)
cloud_cluster->points.push_back (cloud_filtered->points[*pit]); //*
cloud_cluster->width = cloud_cluster->points.size ();
cloud_cluster->height = 1;
cloud_cluster->is_dense = true;
std::cout << "PointCloud representing the Cluster: " << cloud_cluster->points.size () << " data points." << std::endl;
std::stringstream ss;
ss << "../cloud_cluster_" << j << ".pcd";
writer.write<pcl::PointXYZ> (ss.str (), *cloud_cluster, false); // 保存文件
j++;
}
return (0);
}
输出结果
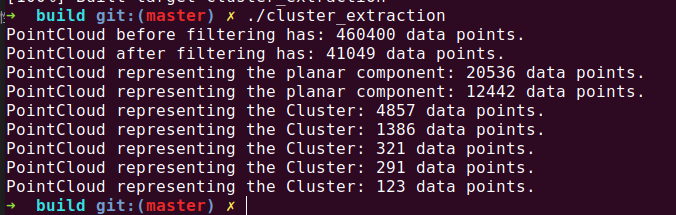
实现效果
结果:分割成5部分
4 Region growing segmentation 区域增长细分
5 Color-based region growing segmentation 基于颜色的区域增长分割
6 Min-Cut Based Segmentation基于最小剪切的分割
7 Conditional Euclidean Clustering 条件欧几里得聚类
8 Difference of Normals Based Segmentation 基于法线的分割差异
9 Clustering of Pointclouds into Supervoxels - Theoretical primer 点云聚集成超级体素-理论底漆
10 Identifying ground returns using ProgressiveMorphologicalFilter segmentation 使用ProgressiveMorphologicalFilter细分识别地面收益
11 Filtering a PointCloud using ModelOutlierRemoval 使用ModelOutlierRemoval过滤PointCloud

若有收获,就点个赞吧
0 人点赞
