实际编程时,需要同步保护的临界区中通常会有数十数百条指令,甚至更多。锁需要将所有线程(或协程)对临界区的访问做串行化处理,就要同时保证两点要求:
(1)同时只能有一个线程获得锁,持有锁才能进入临界区;
(2)当线程离开临界区释放锁后,线程在临界区内做的所有操作都要全局可见。
1. 原子指令
软件层面的锁通常被实现为内存中的一个共享变量,加锁的过程至少需要3个步骤,按顺序依次是Load、Compare和Store。
(1)Load操作从内存中读取锁最新的状态;
(2)Compare操作检测是否处于未加锁状态;
(3)如果未加锁的话就通过Store操作进行修改来实现加锁。如果Compare发现已经处于加锁状态了,就不能执行后续的Store操作了。
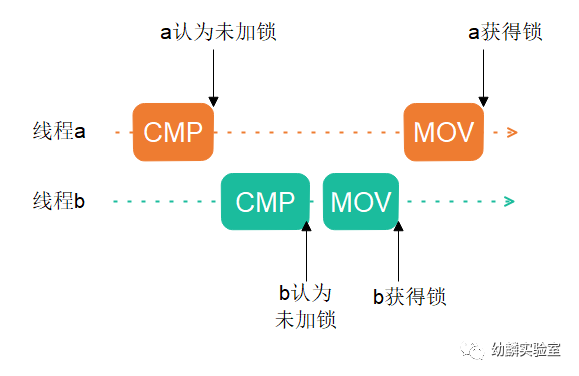
如果用一般的x86汇编指令来实现Load-Compare-Store操作,至少需要两条指令,比如CMP和MOV:
CMP可以接受一个内存地址操作数,所以实质上包含了Load和Compare两步。MOV指令用来向指定内存地址写入数据,也就是Store操作。
但是这样实现会有一个问题,我们知道线程用完时间片之后会被打断,假如线程a执行完CMP指令后发现未加锁,但是在执行MOV之前被打断了,然后线程b开始执行并获得了锁,接下来线程b在临界区中被打断,线程a恢复执行后也获得了锁,这样一来就会出现错误。
所以我们需要在一条指令中完成整个Load-Compare-Store操作,就必须要从硬件层面提供支持,例如x86就提供了CMPXCHG指令。
CMPXCHG是Compare andExchange的缩写,该指令有两个操作数,用来实现锁的时候,第一操作数通常是个内存地址,也称为目的操作数,第二操作数是个通用寄存器。
CMPXCHG会将AX寄存器和第一操作数进行比较,相等的话就把第二操作数,在下面代码存在DX寄存器中,拷贝到目的操作数中;若不相等就把目的操作数拷贝到AX寄存器中。基于这个指令来实现锁的话,一条指令是不会在中间被打断的,所以就解决了之前的问题。
CAS(&addr, old, new) :CX:存了第一操作数地址 AX:存了old DX:存了new
CMPXCHGQ DX, (CX) :首先,CX和AX比较,如果相等,把DX拷贝到CX;否则把CX拷贝到AX
package mainimport (_ "embed""sync/atomic")func main() {var a int64 = 1atomic.CompareAndSwapInt64(&a, 1, 2)}
0x0020 00032 (main.go:9) CALL runtime.newobject(SB)0x0025 00037 (main.go:9) MOVQ AX, "".&a+16(SP)0x002a 00042 (main.go:9) MOVQ $1, (AX)0x0031 00049 (main.go:10) MOVQ "".&a+16(SP), CX0x0036 00054 (main.go:10) MOVL $1, AX0x003b 00059 (main.go:10) MOVL $2, DX0x0040 00064 (main.go:10) LOCK0x0041 00065 (main.go:10) CMPXCHGQ DX, (CX)
在单核环境下,任何能够通过一条指令完成的操作都可以称为“原子操作”,但是这也只适用于单核场景,在多核环境下,运行在不同CPU核心上的线程可能会并行加锁,不同核心同时执行CMPXCHG又会造成多个线程同时获得锁。如何解决这个问题呢?
一种思路是,在当前核心执行CMPXCHG时,阻止其他核心执行CMPXCHG,x86汇编中的LOCK前缀就是用来实现这一目的的。
LOCK前缀能够应用于部分内存操作指令,最简单的解释就是LOCK前缀会让当前CPU核心在当前指令执行期间独占总线,这样其他的CPU核心就不能同时操作内存了。事实上,只有对于不在高速缓存中的数据才会这样,对于高速缓存中的数据,LOCK前缀会通过MESI协议处理多核间缓存一致性。不管怎么说,加上LOCK前缀的CMPXCHG就无懈可击了。在多核环境下,这种带有LOCK前缀的指令也被称为原子指令。
至此,针对锁的两点要求,其中第一个可以通过原子指令实现了。
那么如何做到第二点要求呢?也就是释放锁之后,临界区内所有的操作要全局可见。
事实上,锁本身的状态变化就必须是全局可见的,而且必须要很及时,以保证高性能。因此,在x86 CPU上,LOCK前缀同时具有内存排序的作用,相当于在应用LOCK前缀的指令之后紧接着执行了一条MFENCE指令。综上所述,原子指令既能保证只允许一个线程进入临界区,又具有内存排序的作用,能够保证在锁的状态发生变化时,临界区中所有的修改随锁的状态一起变成全局可见。
2. 自旋锁
自旋锁得以实现的基础就是原子性的CAS操作,CAS即Compare And Swap,在x86平台上对应带有LOCK前缀的CMPXCHG指令。之所以叫自旋锁,是因为它会一直循环尝试CAS操作直到成功,看起来就像是一直在自旋等待。
接下来我们就尝试一下用汇编语言基于CMPXCHG指令实现一把自旋锁,首先在Go语言中基于int32创建一个自定义类型Spin,并为它实现Lock方法和Unlock方法:
type Spin int32func (l *Spin) Lock() { lock((*int32)(l), 0, 1) }func (l *Spin) Unlock() { unlock((*int32)(l), 0) }func lock(ptr *int32, o, n int32)func unlock(ptr *int32, n int32)
实际的加锁和解锁操作在lock和unlock这两个函数中实现,Go代码中只包含这两个函数的原型声明,这两个函数是用汇编语言实现的,具体代码在spin_amd64.s文件中:
#include "textflag.h"// func lock(ptr *int32, old, new int32)TEXT ·lock(SB), NOSPLIT, $0-16MOVQ ptr+0(FP), BXMOVL old+8(FP), AXMOVL new+12(FP), CXagain:LOCKCMPXCHGL CX, 0(BX)JE okJMP againok:RET// func unlock(ptr *int32, val int32)TEXT ·unlock(SB), NOSPLIT, $0-12MOVQ ptr+0(FP), BXMOVL val+8(FP), AXXCHGL AX, 0(BX)RET
lock函数把锁的地址放在了BX寄存器中,把用来比较的旧值old放到了AX寄存器中,把要写入的新值new放到了CX寄存器中。
从标签again处开始,是一个循环,不断尝试通过CMPXCHG进行加锁,成功后会通过JE指令跳出循环。因为Go的汇编风格有点类似AT&T,操作数书写顺序与Intel汇编相反,所以CMPXCHG的两个操作数中BX出现在了CX右边。能够通过JE跳出循环,是因为CMP操作会影响标志寄存器。
unlock函数通过XCHG指令将锁清零,实现了解锁操作。细心的读者可能会注意到这里没有LOCK前缀,根据Intel开发者手册所讲,XCHG指令隐含了LOCK前缀,所以代码中不用写,依然能够起到独占总线和内存排序的作用。
事实上,atomic包中的CompareAndSwapInt32和StoreInt32这两个函数,就是基于CMPXCHG和XCHG这两条汇编指令实现的。所以上述的自旋锁可以改成完全用Go来实现:
import "sync/atomic"type Spin int32func (l *Spin) Lock() { for !atomic.CompareAndSwapInt32((*int32)(l), 0, 1) {} }func (l *Spin) Unlock() { atomic.StoreInt32((*int32)(l), 0) }
这样一来,我们确实实现了自旋锁,但是这跟生产环境中实际使用的自旋锁比起来还是有些差距。在锁竞争比较激烈的场景下,这种自旋会造成CPU使用率很高,所以还要进行优化。x86专门为此提供了PAUSE指令,它一方面能够提示处理器当前正处于自旋循环中,从而在退出循环的时候避免因检测到内存乱序而造成性能损失。另一方面,PAUSE能够大幅减小自旋造成的CPU功率消耗,节能减排减少发热。
可以把PAUSE指令加入到我们汇编版本的lock函数实现中,修改后的代码如下所示:
// func lock(ptr *int32, old, new int32)TEXT ·lock(SB), NOSPLIT, $0-16MOVQ ptr+0(FP), BXMOVL old+8(FP), AXMOVL new+12(FP), CXagain:LOCKCMPXCHGL CX, 0(BX)JE okPAUSEJMP againok:RET
也可以把PAUSE指令单独放在一个函数里,这样就能够跟atomic包中的函数结合使用了:
#include "textflag.h"// func pause()TEXT pause(SB), NOSPLIT, $0-0PAUSERET
这样就对Go代码实现的自旋锁进行优化了:
func (l *Spin) Lock() {for !atomic.CompareAndSwapInt32((*int32)(l), 0, 1) {pause()}}
自旋锁的优点是比较轻量,不过它对适用的场景也是有要求的。首先,在单核心的环境下不适合使用自旋锁,因为单核系统上任一时刻只能有一个线程在运行,当前线程一直在自旋等待而持有锁的线程得不到运行,锁不可能被释放,等也是白等,纯属浪费CPU。这种情况下及时切换到其他可运行的线程会更高效一些,因此在单核环境下更适合用调度器对象。其次,即使是在多核环境下,也要考虑平均持有锁的时间,以及程序的并发程度等因素。在持有锁的时间占比很小,且活跃线程数接近CPU核心数量时,自旋锁比较高效,也就是自旋的代价小于线程切换的代价。其他情况就不一定了,要结合实际场景分析再加上充分的测试。
3.调度器对象
使用调度器对象这个名字,主要是受Windows NT内核的影响。更通俗的讲,应该说是操作系统提供的线程间同步原语,一般以一组系统调用的形式存在。比如Win32的Event,以及Linux的futex等。基于这些同步原语,可以实现锁及更复杂的同步工具。
这些调度器对象与自旋锁的不同,主要是有一个等待队列。当线程获取锁失败时不会一直在那里自旋,而是挂起后进入等待队列中等待,然后系统调度器会切换到下一个可运行的线程。等到持有锁的线程释放锁的时候,会按照一定的算法从等待队列中取出一个线程并唤醒它,被唤醒的线程会获得所有权,然后继续执行。
这些同步原语是由内核提供的,直接与系统的调度器交互,能够挂起和唤醒线程,这一点是自旋锁做不到的。等待队列可以实现成支持FIFO、FILO,甚至支持某种优先级策略。但是也正是由于是在内核中实现的,所以应用程序需要以系统调用的方式来使用它,这就造成了一定的开销。获取锁失败的情况下还会发生线程切换,进一步增大开销。调度器对象和自旋锁各自有适用的场景,具体如何选用还要结合具体场景来分析。
自旋锁主要适用于多核环境下,且持有锁的时间占比较小的情况。这种情况下,往往在几次自旋之后就能拿到锁,比起发生一次线程切换的代价要小得多。
调度器对象主要适用于加锁失败就要挂起线程的场景,比如说单核环境,或者持有锁的时间占比较大的情况。
而实际的业务逻辑中,持有锁的时间往往不是很确定,有可能较短也有可能较长,我们不好一概用一种策略进行处理,将自旋锁和调度器对象结合的话,理论上就能得到一把优化的锁了:
加锁时首先经过自旋锁,但是限制最大自旋次数,如果在有限次数内加锁成功也就成功了,否则就进一步通过调度器对象将当前线程挂起。等到持有锁的线程释放锁的时候,会通过调度器对象将挂起的线程唤醒。
这样就结合了二者的优点,既避免了加锁失败立即挂起线程造成过多的上下文切换,又避免了无限制的自旋空耗CPU,这也是如今主流的锁实现思路,当然,Go语言也不例外。

若有收获,就点个赞吧
0 人点赞
