文本主要介绍一下如何使用 PyTorch 复现 Seq2Seq(with Attention),实现简单的机器翻译任务。首先我会向大家介绍seq2seq与注意力机制的原理,然后介绍seq2seq(with attention)模型各个模块的实现,最后将给出完整代码。
1. seq2seq与注意力机制的原理
1.1 编码器与解码器
编码器和解码器分别对应输入序列和输出序列的两个循环神经网络。我们通常会在输入序列和输出序列后面分别附上一个特殊字符’
1.1.1 编码器
编码器的作用是把一个不定长的输入序列转化成一个定长的背景词向量  。该背景词向量包含了输入序列的信息。常用的编码器是循环神经网络。
。该背景词向量包含了输入序列的信息。常用的编码器是循环神经网络。
首先回顾以下循环神经网络的知识。假设循环神经网络单元为  ,在
,在 时刻的输入为
时刻的输入为 ,
, 。假设是单个输出在嵌入层的结果,例如对应的
。假设是单个输出在嵌入层的结果,例如对应的 向量
向量  与嵌入层参数矩阵
与嵌入层参数矩阵 的乘积
的乘积  。隐藏层变量
。隐藏层变量

编码器的背景向量

一个简单的背景向量可以认为是该网络最终时刻的隐藏层变量 ,即
,即 。我们将这里的循环神经网络叫做编码器。
。我们将这里的循环神经网络叫做编码器。
1.1.2 双向循坏神经网络
编码器的输入既可以是正向传递,也可以是反向传递的。如果输入序列是  ,在正向传递中,隐藏层变量
,在正向传递中,隐藏层变量

而反向传递过程中,隐藏层变量的计算变为

当我们希望编码器的输入既包含正向传递信息又包含反向传递信息时,我们可以使用双向循环神经网络。例如,给定输入序列 ,按正向传递,它们在循环神经网络中的隐藏层变量分别是  ;按反向传播,它们在循环神经网络中的隐藏层变量分别是
;按反向传播,它们在循环神经网络中的隐藏层变量分别是  。在双向循环神经网络中,时刻
。在双向循环神经网络中,时刻  的隐藏层变量是将
的隐藏层变量是将  和
和 拼接起来。例如:
拼接起来。例如:
import torchh_forward = torch.Tensor([1, 2])h_backward = torch.Tensor([3, 4])h_bi = torch.cat((h_forward, h_backward), dim=0)# tensor([1., 2., 3., 4.])
1.1.3 解码器
编码器最终输出了一个背景向量 ,该背景向量整合了输入序列 ,假设训练数据中的输出序列是  ,我们希望表示每个
,我们希望表示每个 时刻输出的向量,既取决于之前的输出又取决于背景向量。因为,我们可以最大化输出序列的联合概率
时刻输出的向量,既取决于之前的输出又取决于背景向量。因为,我们可以最大化输出序列的联合概率

并得到该输出序列的损失函数

为此,我们使用另一个循环神经网络作为解码器。解码器使用函数  来表示单个输出
来表示单个输出  的概率
的概率

其中的  为时刻的解码器的隐藏层变量。该隐藏层变量
为时刻的解码器的隐藏层变量。该隐藏层变量

其中函数  是循环神经网络单元需要注意的是,编码器和解码器通常会使用多层循环神经网络
是循环神经网络单元需要注意的是,编码器和解码器通常会使用多层循环神经网络
1.2 注意力机制
1.2.1 图解注意力机制
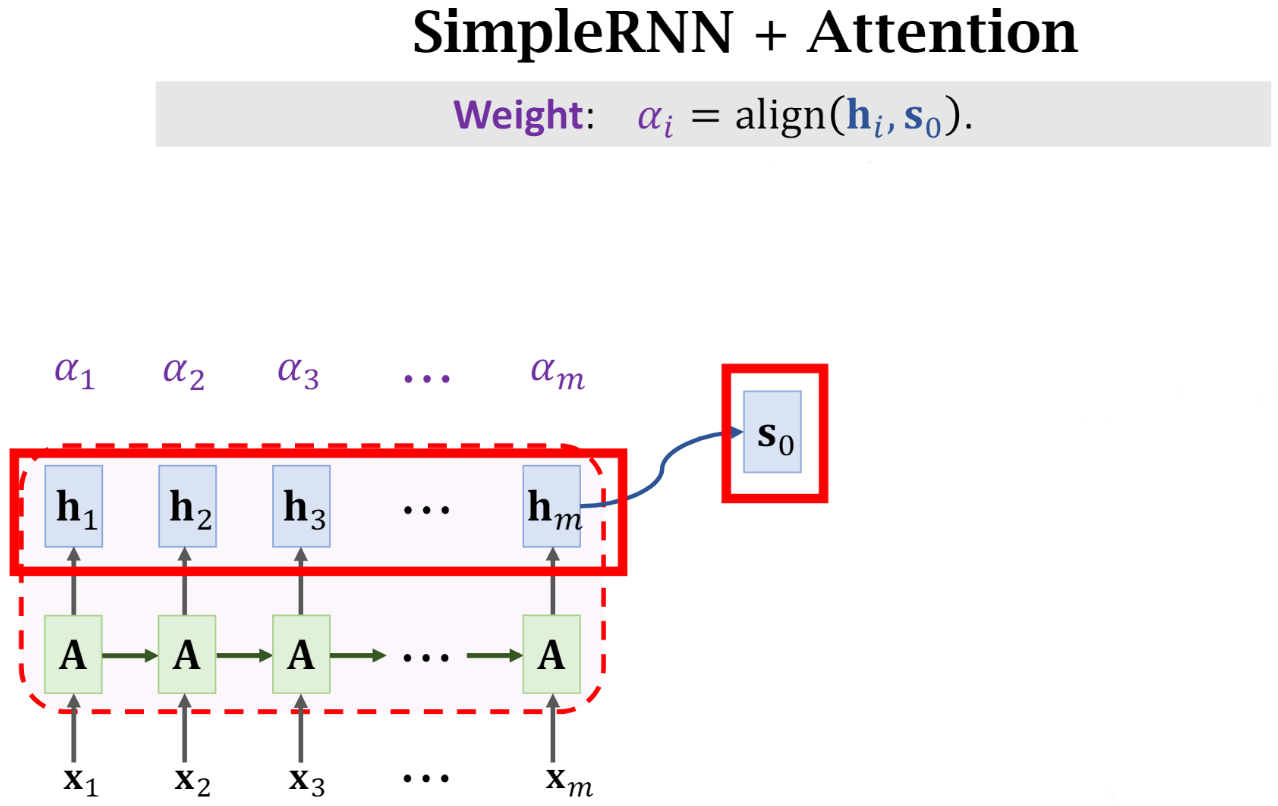
以前讲BERT的时候,讲过注意力机制,今天我们通过图片再来了解一下。下图是一个 Encoder 架构, 从值上来说与
从值上来说与  是相等的,只不过这里换了个名字。
是相等的,只不过这里换了个名字。
首先我们需要将 和所有的  计算一个 “相关性”,比方说计算 和
计算一个 “相关性”,比方说计算 和  之间的相关性计算得
之间的相关性计算得
计算得到 m 个相关性  之后,将这些值与
之后,将这些值与  进行加权平均,即:
进行加权平均,即:

我们可以直观的感受一下这样做有什么作用,对于那些值比较大的  ,最终
,最终  中也会有一大部分来自于
中也会有一大部分来自于  。实际上考虑到了所有时刻的
。实际上考虑到了所有时刻的  ,只不过对于某些时刻可能关注的更多,而某些时刻关注的更少,这就是注意力机制。
,只不过对于某些时刻可能关注的更多,而某些时刻关注的更少,这就是注意力机制。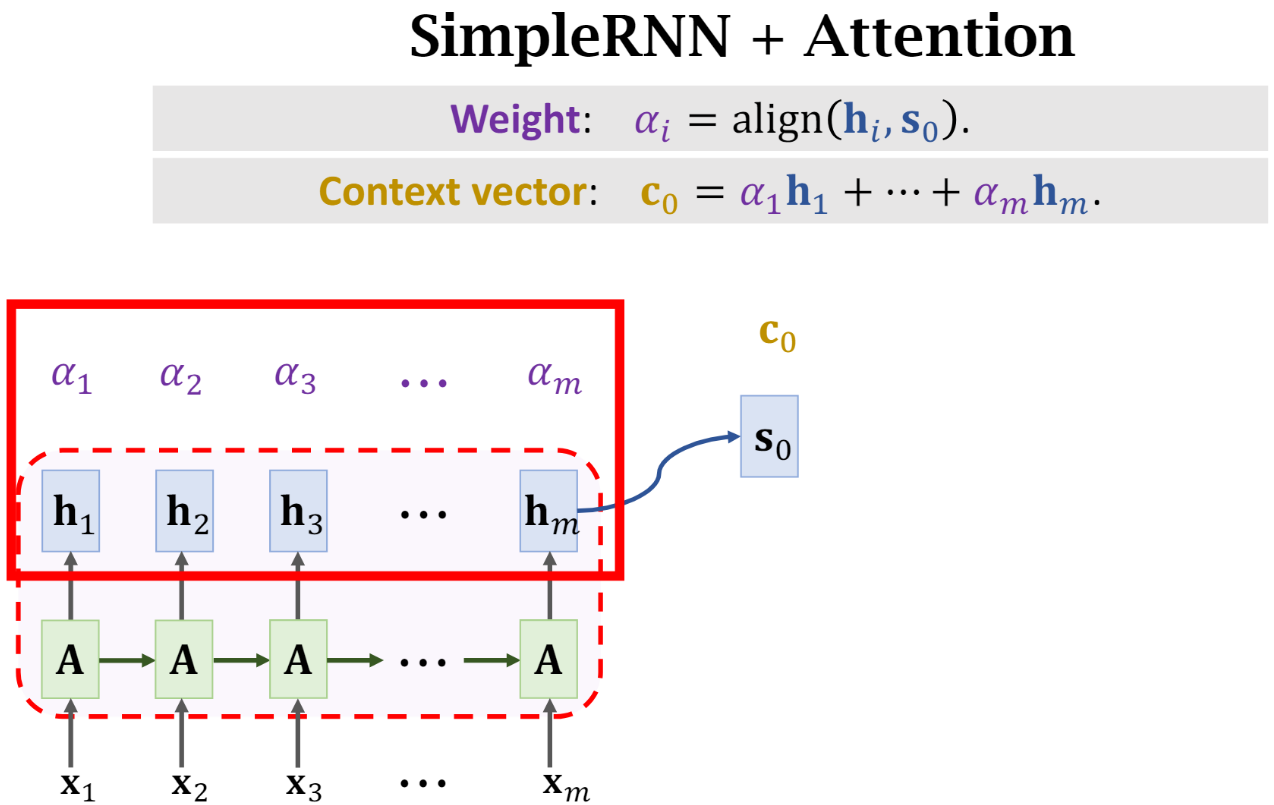
之后将 作为
作为 时刻 Decoder 的输入,计算
时刻 Decoder 的输入,计算 ,然后再计算 与所有
,然后再计算 与所有  之间的相关性
之间的相关性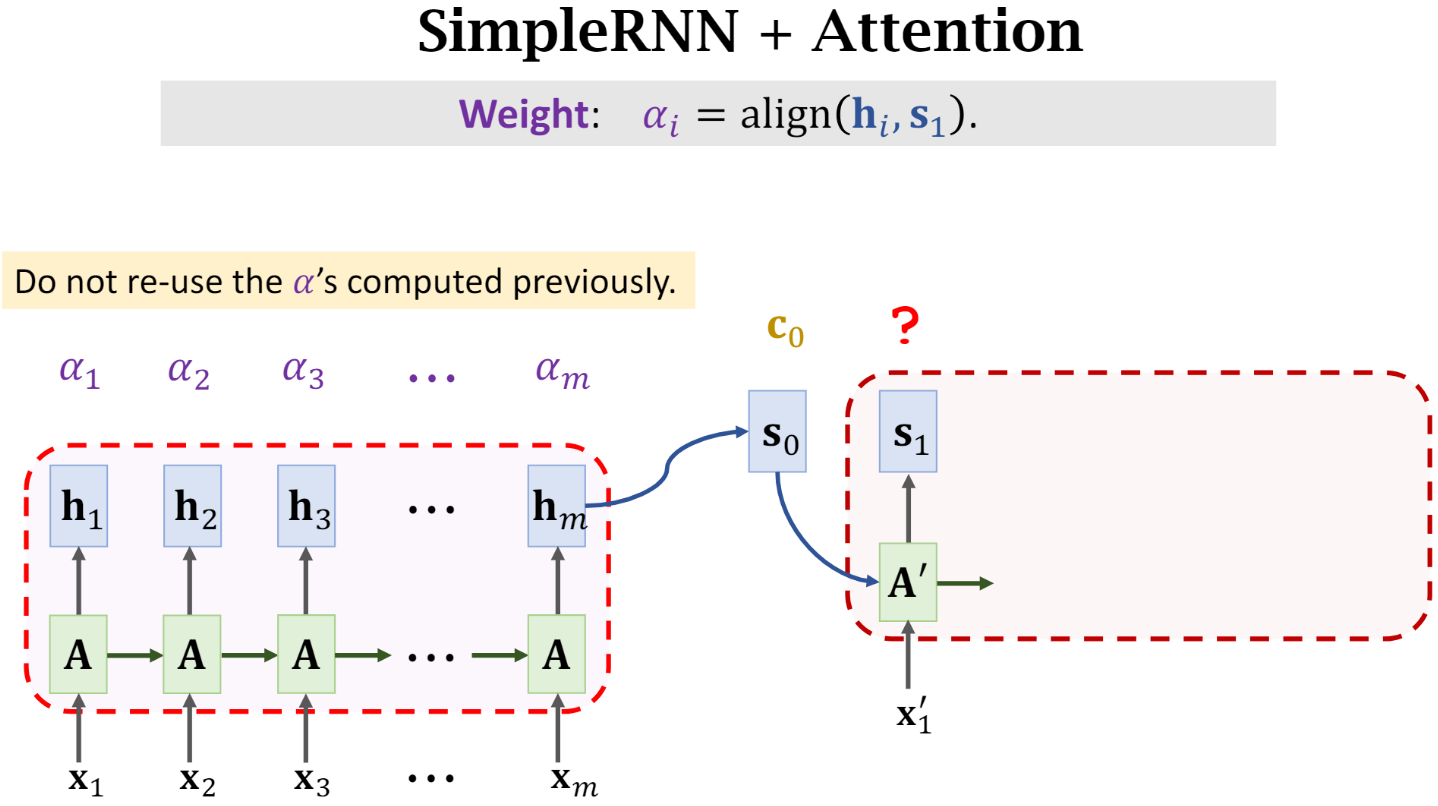
同样的,将新计算得到的 与做加权平均,得到新的 context vector  。
。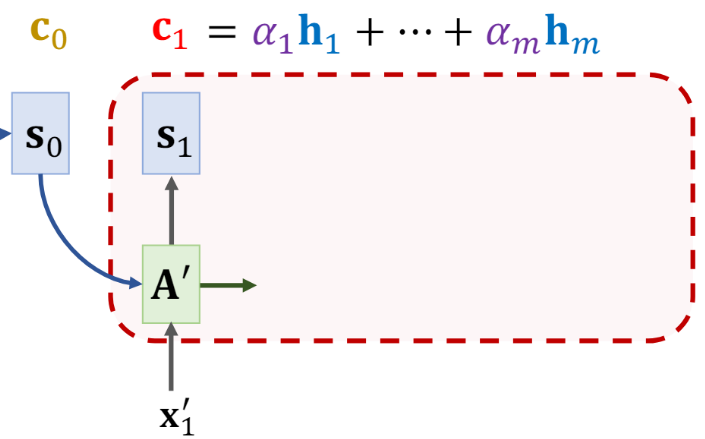
重复上述步骤,知道Decoder结束。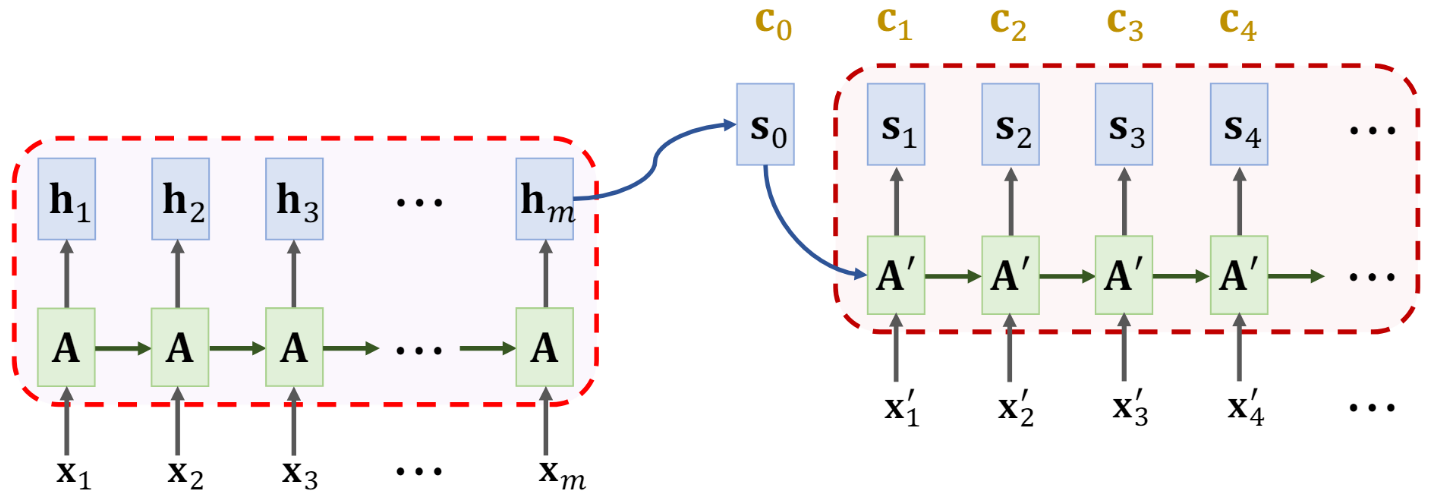
到这里实际上整个 Seq2Seq(with Attention) 就讲完了,但是其中还有一些细节,比方说,align()函数怎么设计? 如何应用到 Decoder 中?下面一一解释。
如何应用到 Decoder 中?下面一一解释。
1.2.2 align()函数如何设计?
有两种方法,在最初的论文,即Bahdanau 的论文中,他的设计方式如下图所示: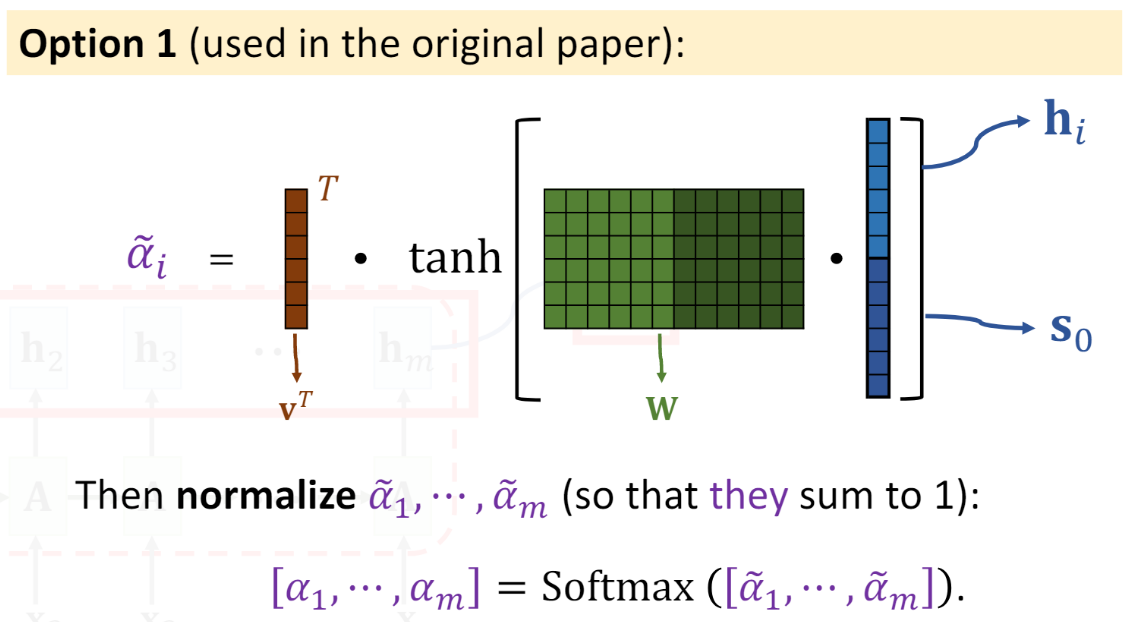
现在比较主流的,同时也是 Transformer 结构使用的方法如下所示: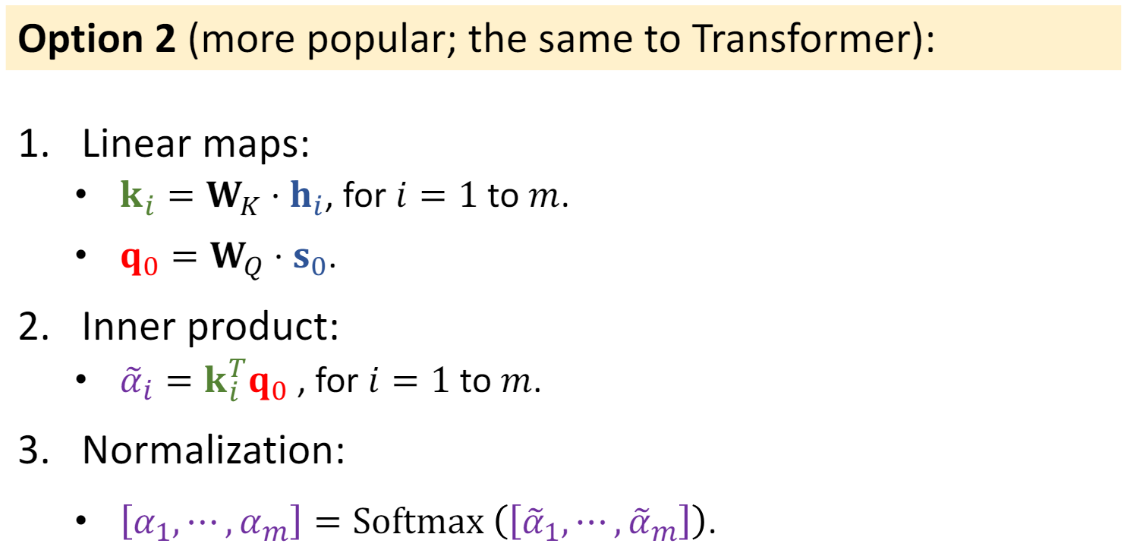
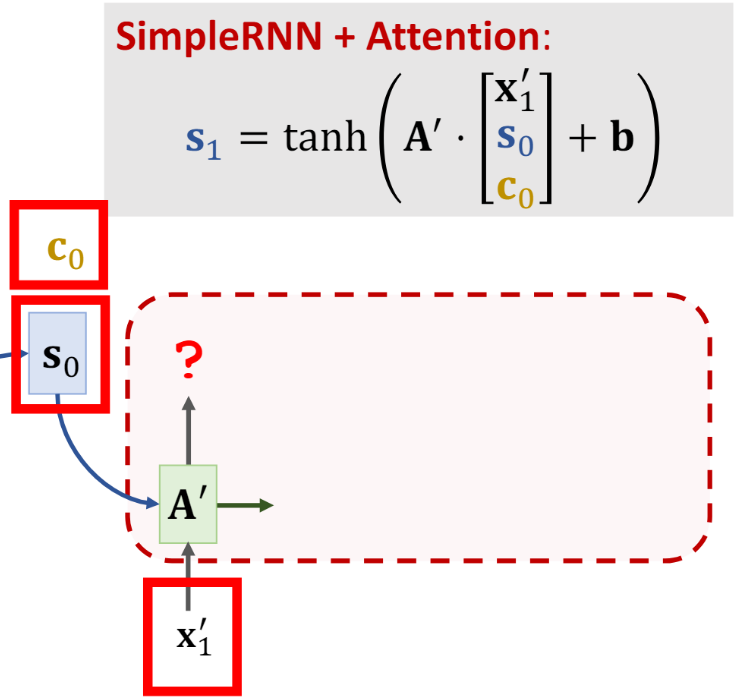
1.2.3 如何应用到 Decoder 中?
2. seq2seq各个模块的实现
在这里我们将实现四个模块:Encoder,Decoder,Attention,Seq2seq
2.1 Encoder
Encoder 我是用的单层双向 GRU
双向 GRU 的隐藏状态输出由两个向量拼接而成,例如  ,
, …… 所有时刻的最后一层隐藏状态就构成了 GRU 的 output
…… 所有时刻的最后一层隐藏状态就构成了 GRU 的 output

假设这是个 m 层 GRU,那么最后一个时刻所有层中的隐藏状态就构成了 GRU 的 final hidden states

其中

所以

我们需要的是  的最后一层输出(包括正向和反向),因此我们可以通过
的最后一层输出(包括正向和反向),因此我们可以通过 和
和 取出最后一层的
取出最后一层的  ,将它们拼接起来记作 最后一个细节之处在于,的维度是[batchsize, en_hid_dim*2],即便是没有 Attention 机制,将 作为 Decoder 的初始隐藏状态也不对,因为维度不匹配,Decoder 的初始隐藏状态是三维的,而现在我们的 是二维的,因此需要将 的维度转为三维,并且还要调整各个维度上的值。首先我通过一个全连接神经网络,将 的维度变为[batch_size, dec_hid_dim]
,将它们拼接起来记作 最后一个细节之处在于,的维度是[batchsize, en_hid_dim*2],即便是没有 Attention 机制,将 作为 Decoder 的初始隐藏状态也不对,因为维度不匹配,Decoder 的初始隐藏状态是三维的,而现在我们的 是二维的,因此需要将 的维度转为三维,并且还要调整各个维度上的值。首先我通过一个全连接神经网络,将 的维度变为[batch_size, dec_hid_dim]
Encoder 的细节就这么多,下面直接上代码,我的代码风格是,注释在上,代码在下
class Encoder(nn.Module):
def __init__(self, input_dim, emb_dim, enc_hid_dim, dec_hid_dim, dropout):
super(Encoder,self).__init__()
self.embedding = nn.Embedding(input_dim, emb_dim)
self.rnn = nn.GRU(emb_dim, enc_hid_dim, bidirectional = True)
self.fc = nn.Linear(enc_hid_dim * 2, dec_hid_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, src):
'''
src = [src_len, batch_size]
'''
src = src.transpose(0, 1) # src = [batch_size, src_len]
embedded = self.dropout(self.embedding(src)).transpose(0, 1) # embedded = [src_len, batch_size, emb_dim]
# enc_output = [src_len, batch_size, hid_dim * num_directions]
# enc_hidden = [n_layers * num_directions, batch_size, hid_dim]
enc_output, enc_hidden = self.rnn(embedded) # if h_0 is not give, it will be set 0 acquiescently
# enc_hidden is stacked [forward_1, backward_1, forward_2, backward_2, ...]
# enc_output are always from the last layer
# enc_hidden [-2, :, : ] is the last of the forwards RNN
# enc_hidden [-1, :, : ] is the last of the backwards RNN
# initial decoder hidden is final hidden state of the forwards and backwards
# encoder RNNs fed through a linear layer
# s = [batch_size, dec_hid_dim]
s = torch.tanh(self.fc(torch.cat((enc_hidden[-2,:,:], enc_hidden[-1,:,:]), dim = 1)))
return enc_output, s
2.2 Attention
attention 无非就是三个公式



其中  指的就是 Encoder 中的变量s,
指的就是 Encoder 中的变量s, 指的就是 Encoder 中的变量enc_output,
指的就是 Encoder 中的变量enc_output, 其实就是一个简单的全连接神经网络
其实就是一个简单的全连接神经网络
我们可以从最后一个公式反推各个变量的维度是什么,或者维度有什么要求,首先  的维度应该是[batchsize, src_len],这是毋庸置疑的,那么 的维度也应该是[batchsize, src_len],或者 是个三维的,但是某个维度值为 1,可以通过squeeze()变成两维的。这里我们先假设
的维度应该是[batchsize, src_len],这是毋庸置疑的,那么 的维度也应该是[batchsize, src_len],或者 是个三维的,但是某个维度值为 1,可以通过squeeze()变成两维的。这里我们先假设  的维度是[batch_size, src_len, 1],等会儿我再解释为什么要这样假设
的维度是[batch_size, src_len, 1],等会儿我再解释为什么要这样假设
继续往上推,变量  的维度就应该是[?, 1],?表示我暂时不知道它的值应该是多少。
的维度就应该是[?, 1],?表示我暂时不知道它的值应该是多少。 的维度应该是[batch_size, src_len, ?]
的维度应该是[batch_size, src_len, ?]
现在已知 的维度是[batchsize, src_len, enc_hid_dim*2],目前的维度是[batchsize, dec_hid_dim],这两个变量需要做拼接,送入全连接神经网络,因此我们首先需要将 的维度变成[batch_size, src_len, dec_hid_dim],拼接之后的维度就变成[batch_size, src_len, enc_hid_dim*2+enc_hid_dim],于是 这个函数的输入输出值也就有了
attn = nn.Linear(enc_hid_dim*2+enc_hid_dim, ?)
到此为止,除了?部分的值不清楚,其它所有维度都推导出来了。现在我们回过头思考一下?设置成多少,好像其实并没有任何限制,所以我们可以设置?为任何值(在代码中我设置?为dec_hid_dim)
Attention 细节就这么多,下面给出代码
class Attention(nn.Module):
def __init__(self, enc_hid_dim, dec_hid_dim):
super(Attention,self).__init__()
self.attn = nn.Linear((enc_hid_dim * 2) + dec_hid_dim, dec_hid_dim, bias=False)
self.v = nn.Linear(dec_hid_dim, 1, bias = False)
def forward(self, s, enc_output):
# s = [batch_size, dec_hid_dim]
# enc_output = [src_len, batch_size, enc_hid_dim * 2]
batch_size = enc_output.shape[1]
src_len = enc_output.shape[0]
# repeat decoder hidden state src_len times
# s = [batch_size, src_len, dec_hid_dim]
# enc_output = [batch_size, src_len, enc_hid_dim * 2]
s = s.unsqueeze(1).repeat(1, src_len, 1)
enc_output = enc_output.transpose(0, 1)
# energy = [batch_size, src_len, dec_hid_dim]
energy = torch.tanh(self.attn(torch.cat((s, enc_output), dim = 2)))
# attention = [batch_size, src_len]
attention = self.v(energy).squeeze(2)
return F.softmax(attention, dim=1)
2.3 Decoder
Decoder 我用的是单向单层 GRU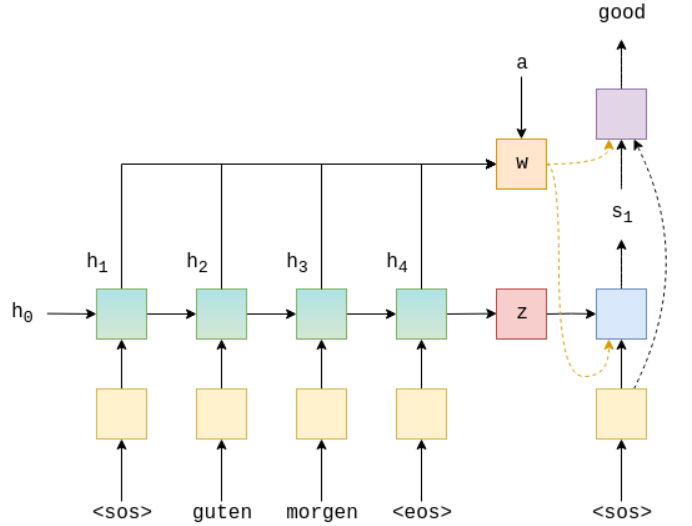
Decoder 部分实际上也就是三个公式



首先在 Encoder 中最开始先调用一次 Attention,得到权重 ,它的维度是[batchsize, src_len],而 是enc_ouput,它的维度是[src_len, batch_size, enc_hid_dim*2],它俩要相乘,同时应该保留batch_size这个维度,所以应该先将 扩展一维,然后调换一下 维度的顺序,之后再按照 batch 相乘(即同一个 batch 内的矩阵相乘)
a = a.unsqueeze(1) # [batch_size, 1, src_len]
H = H.transpose(0, 1) # [batch_size, src_len, enc_hid_dim*2]
w = torch.bmm(a, h) # [batch_size, 1, enc_hid_dim*2]
由于GRU只能传入两个参数,所以需要将 和w整合为一个参数,实际上就是 Seq2Seq 类中的decinput变量,它的维度是[batch_size],因此先将 扩展一个维度,再通过 WordEmbedding,这样他就变成[batchsize, 1, emb_dim]。最后对 和 进行 concat
和w整合为一个参数,实际上就是 Seq2Seq 类中的decinput变量,它的维度是[batch_size],因此先将 扩展一个维度,再通过 WordEmbedding,这样他就变成[batchsize, 1, emb_dim]。最后对 和 进行 concat
y = y.unsqueeze(1) # [batch_size, 1]
emb_y = self.emb(y) # [batch_size, 1, emb_dim]
rnn_input = torch.cat((emb_y, c), dim=2) # [batch_size, 1, emb_dim+enc_hid_dim*2]
的维度是[batch_size, dec_hid_dim],所以应该先将其拓展一个维度
rnn_input = rnn_input.transpose(0, 1) # [1, batch_size, emb_dim+enc_hid_dim*2]
s = s.unsqueeze(1) # [batch_size, 1, dec_hid_dim]
# dec_output = [1, batch_size, dec_hid_dim]
# dec_hidden = [1, batch_size, dec_hid_dim] = s (new, is not s previously)
dec_output, dec_hidden = self.rnn(rnn_input, s)
最后一个公式,需要将三个变量全部拼接在一起,然后通过一个全连接神经网络,得到最终的预测。我们先分析下这个三个变量的维度,的维度是[batch_size, 1, emb_dim],的维度是[batch_size, 1, enc_hid_dim], 的维度是[1, batch_size, dec_hid_dim],因此我们可以像下面这样把他们全部拼接起来。
的维度是[1, batch_size, dec_hid_dim],因此我们可以像下面这样把他们全部拼接起来。
emd_y = emb_y.squeeze(1) # [batch_size, emb_dim]
c = w.squeeze(1) # [batch_size, enc_hid_dim*2]
s = s.squeeze(0) # [batch_size, dec_hid_dim]
fc_input = torch.cat((emb_y, c, s), dim=1) # [batch_size, enc_hid_dim*2+dec_hid_dim+emb_hid]
以上就是 Decoder 部分的细节,下面给出代码(上面的那些只是示例代码,和下面代码变量名可能不一样)
class Decoder(nn.Module):
def __init__(self, output_dim, emb_dim, enc_hid_dim, dec_hid_dim, dropout, attention):
super(Decoder,self).__init__()
self.output_dim = output_dim
self.attention = attention
self.embedding = nn.Embedding(output_dim, emb_dim)
self.rnn = nn.GRU((enc_hid_dim * 2) + emb_dim, dec_hid_dim)
self.fc_out = nn.Linear((enc_hid_dim * 2) + dec_hid_dim + emb_dim, output_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, dec_input, s, enc_output):
# dec_input = [batch_size]
# s = [batch_size, dec_hid_dim]
# enc_output = [src_len, batch_size, enc_hid_dim * 2]
dec_input = dec_input.unsqueeze(1) # dec_input = [batch_size, 1]
embedded = self.dropout(self.embedding(dec_input)).transpose(0, 1) # embedded = [1, batch_size, emb_dim]
# a = [batch_size, 1, src_len]
a = self.attention(s, enc_output).unsqueeze(1)
# enc_output = [batch_size, src_len, enc_hid_dim * 2]
enc_output = enc_output.transpose(0, 1)
# c = [1, batch_size, enc_hid_dim * 2]
c = torch.bmm(a, enc_output).transpose(0, 1)
# rnn_input = [1, batch_size, (enc_hid_dim * 2) + emb_dim]
rnn_input = torch.cat((embedded, c), dim = 2)
# dec_output = [src_len(=1), batch_size, dec_hid_dim]
# dec_hidden = [n_layers * num_directions, batch_size, dec_hid_dim]
dec_output, dec_hidden = self.rnn(rnn_input, s.unsqueeze(0))
# embedded = [batch_size, emb_dim]
# dec_output = [batch_size, dec_hid_dim]
# c = [batch_size, enc_hid_dim * 2]
embedded = embedded.squeeze(0)
dec_output = dec_output.squeeze(0)
c = c.squeeze(0)
# pred = [batch_size, output_dim]
pred = self.fc_out(torch.cat((dec_output, c, embedded), dim = 1))
return pred, dec_hidden.squeeze(0)
2.4 seq2seq(with attention)
传统 Seq2Seq 是直接将句子中每个词连续不断输入 Decoder 进行训练,而引入 Attention 机制之后,我需要能够人为控制一个词一个词进行输入(因为输入每个词到 Decoder,需要再做一些运算),所以在代码中会看到我使用了 for 循环,循环 trg_len-1 次(开头的
训练过程中我使用了一种叫做 Teacher Forcing 的机制,保证训练速度的同时增加鲁棒性。
for 循环中应该要做哪些事呢?首先要将变量传入 Decoder,由于 Attention 的计算是在 Decoder 的内部进行的,所以我需要将dec_input、s、enc_output这三个变量传入 Decoder,Decoder 会返回dec_output以及新的s。之后根据概率对dec_output做 Teacher Forcing 即可,以下是代码实现:
class Seq2Seq(nn.Module):
def __init__(self, encoder, decoder, device):
super(Seq2Seq,self).__init__()
self.encoder = encoder
self.decoder = decoder
self.device = device
def forward(self, src, trg, teacher_forcing_ratio = 0.5):
# src = [src_len, batch_size]
# trg = [trg_len, batch_size]
# teacher_forcing_ratio is probability to use teacher forcing
batch_size = src.shape[1]
trg_len = trg.shape[0]
trg_vocab_size = self.decoder.output_dim
# tensor to store decoder outputs
outputs = torch.zeros(trg_len, batch_size, trg_vocab_size).to(self.device)
# enc_output is all hidden states of the input sequence, back and forwards
# s is the final forward and backward hidden states, passed through a linear layer
enc_output, s = self.encoder(src)
# first input to the decoder is the <sos> tokens
dec_input = trg[0,:]
for t in range(1, trg_len):
# insert dec_input token embedding, previous hidden state and all encoder hidden states
# receive output tensor (predictions) and new hidden state
dec_output, s = self.decoder(dec_input, s, enc_output)
# place predictions in a tensor holding predictions for each token
outputs[t] = dec_output
# decide if we are going to use teacher forcing or not
teacher_force = random.random() < teacher_forcing_ratio
# get the highest predicted token from our predictions
top1 = dec_output.argmax(1)
# if teacher forcing, use actual next token as next input
# if not, use predicted token
dec_input = trg[t] if teacher_force else top1
return outputs
讲到这里,seq2seq(with attention)各个模块的代码就结束了。
3. seq2seq模型完整实现
import torch
import torch.nn as nn
import torch.optim as optim
import torch.nn.functional as F
from torchtext.datasets import Multi30k
from torchtext.data import Field, BucketIterator
import spacy
import numpy as np
import random
import math
import time
#设置随机种子
SEED = 1234
random.seed(SEED)
np.random.seed(SEED)
torch.manual_seed(SEED)
torch.cuda.manual_seed(SEED)
torch.backends.cudnn.deterministic = True
#加载英文,德语spacy模型
! python -m spacy download de
spacy_de = spacy.load('de')
spacy_en = spacy.load('en')
"""We create the tokenizers."""
def tokenize_de(text):
# Tokenizes German text from a string into a list of strings
return [tok.text for tok in spacy_de.tokenizer(text)]
def tokenize_en(text):
# Tokenizes English text from a string into a list of strings
return [tok.text for tok in spacy_en.tokenizer(text)]
"""The fields remain the same as before."""
SRC = Field(tokenize = tokenize_de,
init_token = '<sos>',
eos_token = '<eos>',
lower = True)
TRG = Field(tokenize = tokenize_en,
init_token = '<sos>',
eos_token = '<eos>',
lower = True)
#加载数据
train_data, valid_data, test_data = Multi30k.splits(exts = ('.de', '.en'),fields = (SRC, TRG))
#建立词汇表
SRC.build_vocab(train_data, min_freq = 2)
TRG.build_vocab(train_data, min_freq = 2)
#定义训练装备
device = torch.device('cuda' if torch.cuda.is_available() else 'cpu')
#建立数据迭代器
BATCH_SIZE = 128
train_iterator, valid_iterator, test_iterator = BucketIterator.splits(
(train_data, valid_data, test_data),
batch_size = BATCH_SIZE,
device = device)
#Encoder模型
class Encoder(nn.Module):
def __init__(self, input_dim, emb_dim, enc_hid_dim, dec_hid_dim, dropout):
super(Encoder,self).__init__()
self.embedding = nn.Embedding(input_dim, emb_dim)
self.rnn = nn.GRU(emb_dim, enc_hid_dim, bidirectional = True)
self.fc = nn.Linear(enc_hid_dim * 2, dec_hid_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, src):
'''
src = [src_len, batch_size]
'''
src = src.transpose(0, 1) # src = [batch_size, src_len]
embedded = self.dropout(self.embedding(src)).transpose(0, 1) # embedded = [src_len, batch_size, emb_dim]
# enc_output = [src_len, batch_size, hid_dim * num_directions]
# enc_hidden = [n_layers * num_directions, batch_size, hid_dim]
enc_output, enc_hidden = self.rnn(embedded) # if h_0 is not give, it will be set 0 acquiescently
# enc_hidden is stacked [forward_1, backward_1, forward_2, backward_2, ...]
# enc_output are always from the last layer
# enc_hidden [-2, :, : ] is the last of the forwards RNN
# enc_hidden [-1, :, : ] is the last of the backwards RNN
# initial decoder hidden is final hidden state of the forwards and backwards
# encoder RNNs fed through a linear layer
# s = [batch_size, dec_hid_dim]
s = torch.tanh(self.fc(torch.cat((enc_hidden[-2,:,:], enc_hidden[-1,:,:]), dim = 1)))
return enc_output, s
#Attention模型
class Attention(nn.Module):
def __init__(self, enc_hid_dim, dec_hid_dim):
super(Attention,self).__init__()
self.attn = nn.Linear((enc_hid_dim * 2) + dec_hid_dim, dec_hid_dim, bias=False)
self.v = nn.Linear(dec_hid_dim, 1, bias = False)
def forward(self, s, enc_output):
# s = [batch_size, dec_hid_dim]
# enc_output = [src_len, batch_size, enc_hid_dim * 2]
batch_size = enc_output.shape[1]
src_len = enc_output.shape[0]
# repeat decoder hidden state src_len times
# s = [batch_size, src_len, dec_hid_dim]
# enc_output = [batch_size, src_len, enc_hid_dim * 2]
s = s.unsqueeze(1).repeat(1, src_len, 1)
enc_output = enc_output.transpose(0, 1)
# energy = [batch_size, src_len, dec_hid_dim]
energy = torch.tanh(self.attn(torch.cat((s, enc_output), dim = 2)))
# attention = [batch_size, src_len]
attention = self.v(energy).squeeze(2)
return F.softmax(attention, dim=1)
#Decoder模型
class Decoder(nn.Module):
def __init__(self, output_dim, emb_dim, enc_hid_dim, dec_hid_dim, dropout, attention):
super(Decoder,self).__init__()
self.output_dim = output_dim
self.attention = attention
self.embedding = nn.Embedding(output_dim, emb_dim)
self.rnn = nn.GRU((enc_hid_dim * 2) + emb_dim, dec_hid_dim)
self.fc_out = nn.Linear((enc_hid_dim * 2) + dec_hid_dim + emb_dim, output_dim)
self.dropout = nn.Dropout(dropout)
def forward(self, dec_input, s, enc_output):
# dec_input = [batch_size]
# s = [batch_size, dec_hid_dim]
# enc_output = [src_len, batch_size, enc_hid_dim * 2]
dec_input = dec_input.unsqueeze(1) # dec_input = [batch_size, 1]
embedded = self.dropout(self.embedding(dec_input)).transpose(0, 1) # embedded = [1, batch_size, emb_dim]
# a = [batch_size, 1, src_len]
a = self.attention(s, enc_output).unsqueeze(1)
# enc_output = [batch_size, src_len, enc_hid_dim * 2]
enc_output = enc_output.transpose(0, 1)
# c = [1, batch_size, enc_hid_dim * 2]
c = torch.bmm(a, enc_output).transpose(0, 1)
# rnn_input = [1, batch_size, (enc_hid_dim * 2) + emb_dim]
rnn_input = torch.cat((embedded, c), dim = 2)
# dec_output = [src_len(=1), batch_size, dec_hid_dim]
# dec_hidden = [n_layers * num_directions, batch_size, dec_hid_dim]
dec_output, dec_hidden = self.rnn(rnn_input, s.unsqueeze(0))
# embedded = [batch_size, emb_dim]
# dec_output = [batch_size, dec_hid_dim]
# c = [batch_size, enc_hid_dim * 2]
embedded = embedded.squeeze(0)
dec_output = dec_output.squeeze(0)
c = c.squeeze(0)
# pred = [batch_size, output_dim]
pred = self.fc_out(torch.cat((dec_output, c, embedded), dim = 1))
return pred, dec_hidden.squeeze(0)
#seq2seq模型
class Seq2Seq(nn.Module):
def __init__(self, encoder, decoder, device):
super(Seq2Seq,self).__init__()
self.encoder = encoder
self.decoder = decoder
self.device = device
def forward(self, src, trg, teacher_forcing_ratio = 0.5):
# src = [src_len, batch_size]
# trg = [trg_len, batch_size]
# teacher_forcing_ratio is probability to use teacher forcing
batch_size = src.shape[1]
trg_len = trg.shape[0]
trg_vocab_size = self.decoder.output_dim
# tensor to store decoder outputs
outputs = torch.zeros(trg_len, batch_size, trg_vocab_size).to(self.device)
# enc_output is all hidden states of the input sequence, back and forwards
# s is the final forward and backward hidden states, passed through a linear layer
enc_output, s = self.encoder(src)
# first input to the decoder is the <sos> tokens
dec_input = trg[0,:]
for t in range(1, trg_len):
# insert dec_input token embedding, previous hidden state and all encoder hidden states
# receive output tensor (predictions) and new hidden state
dec_output, s = self.decoder(dec_input, s, enc_output)
# place predictions in a tensor holding predictions for each token
outputs[t] = dec_output
# decide if we are going to use teacher forcing or not
teacher_force = random.random() < teacher_forcing_ratio
# get the highest predicted token from our predictions
top1 = dec_output.argmax(1)
# if teacher forcing, use actual next token as next input
# if not, use predicted token
dec_input = trg[t] if teacher_force else top1
return outputs
#训练seq2seq模型
INPUT_DIM = len(SRC.vocab)
OUTPUT_DIM = len(TRG.vocab)
ENC_EMB_DIM = 256
DEC_EMB_DIM = 256
ENC_HID_DIM = 512
DEC_HID_DIM = 512
ENC_DROPOUT = 0.5
DEC_DROPOUT = 0.5
attn = Attention(ENC_HID_DIM, DEC_HID_DIM)
enc = Encoder(INPUT_DIM, ENC_EMB_DIM, ENC_HID_DIM, DEC_HID_DIM, ENC_DROPOUT)
dec = Decoder(OUTPUT_DIM, DEC_EMB_DIM, ENC_HID_DIM, DEC_HID_DIM, DEC_DROPOUT, attn)
model = Seq2Seq(enc, dec, device).to(device)
TRG_PAD_IDX = TRG.vocab.stoi[TRG.pad_token]
criterion = nn.CrossEntropyLoss(ignore_index = TRG_PAD_IDX).to(device)
optimizer = optim.Adam(model.parameters(), lr=1e-3)
#模型训练函数
def train(model, iterator, optimizer, criterion):
model.train()
epoch_loss = 0
for i, batch in enumerate(iterator):
src = batch.src
trg = batch.trg # trg = [trg_len, batch_size]
# pred = [trg_len, batch_size, pred_dim]
pred = model(src, trg)
pred_dim = pred.shape[-1]
# trg = [(trg len - 1) * batch size]
# pred = [(trg len - 1) * batch size, pred_dim]
trg = trg[1:].view(-1)
pred = pred[1:].view(-1, pred_dim)
loss = criterion(pred, trg)
optimizer.zero_grad()
loss.backward()
optimizer.step()
epoch_loss += loss.item()
return epoch_loss / len(iterator)
#模型评估函数
def evaluate(model, iterator, criterion):
model.eval()
epoch_loss = 0
with torch.no_grad():
for i, batch in enumerate(iterator):
src = batch.src
trg = batch.trg # trg = [trg_len, batch_size]
# output = [trg_len, batch_size, output_dim]
output = model(src, trg, 0) # turn off teacher forcing
output_dim = output.shape[-1]
# trg = [(trg_len - 1) * batch_size]
# output = [(trg_len - 1) * batch_size, output_dim]
output = output[1:].view(-1, output_dim)
trg = trg[1:].view(-1)
loss = criterion(output, trg)
epoch_loss += loss.item()
return epoch_loss / len(iterator)
#计算训练时间
def epoch_time(start_time, end_time):
elapsed_time = end_time - start_time
elapsed_mins = int(elapsed_time / 60)
elapsed_secs = int(elapsed_time - (elapsed_mins * 60))
return elapsed_mins, elapsed_secs
"""Then, we train our model, saving the parameters that give us the best validation loss."""
best_valid_loss = float('inf')
#模型训练
for epoch in range(10):
start_time = time.time()
train_loss = train(model, train_iterator, optimizer, criterion)
valid_loss = evaluate(model, valid_iterator, criterion)
end_time = time.time()
epoch_mins, epoch_secs = epoch_time(start_time, end_time)
if valid_loss < best_valid_loss:
best_valid_loss = valid_loss
torch.save(model.state_dict(), 'tut3-model.pt')
print(f'Epoch: {epoch+1:02} | Time: {epoch_mins}m {epoch_secs}s')
print(f'\tTrain Loss: {train_loss:.3f} | Train PPL: {math.exp(train_loss):7.3f}')
print(f'\t Val. Loss: {valid_loss:.3f} | Val. PPL: {math.exp(valid_loss):7.3f}')
#加载训练好的参数,测试模型
model.load_state_dict(torch.load('tut3-model.pt'))
test_loss = evaluate(model, test_iterator, criterion)
print(f'| Test Loss: {test_loss:.3f} | Test PPL: {math.exp(test_loss):7.3f} |')

若有收获,就点个赞吧
0 人点赞

{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}