启动入口
从链接脚本u-boot.lds(每种arch有自己的lds文件)可以看到,u-boot程序的入口是汇编函数_start:
OUTPUT_FORMAT("elf32-littlearm", "elf32-littlearm", "elf32-littlearm")OUTPUT_ARCH(arm) #这里是arm 32bitENTRY(_start) #链接程序会根据这一句指定程序入口
ARM 32bit流程
_start
_start定义在arch/arm/lib/vectors.S文件中,中间跳转过程如下: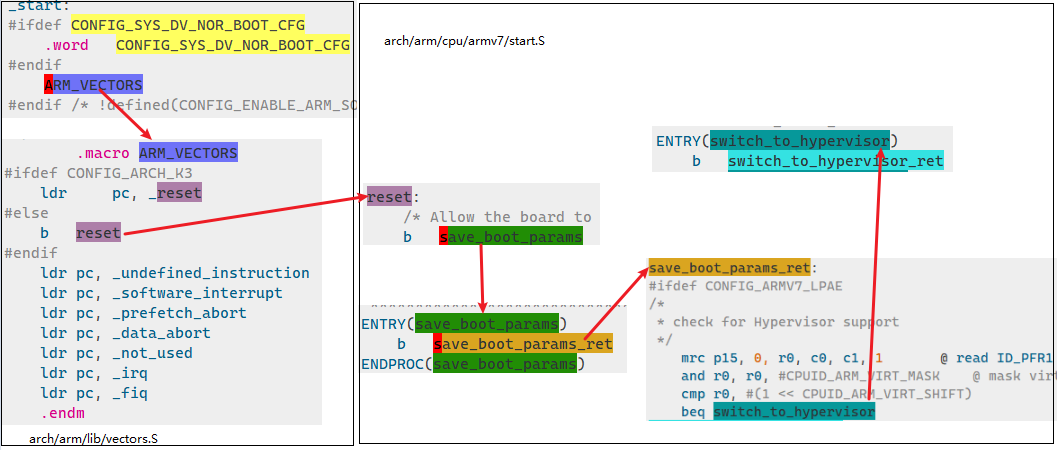 switch_to_hypervisor_ret真正开始执行初始化任务:
switch_to_hypervisor_ret真正开始执行初始化任务:
switch_to_hypervisor_ret
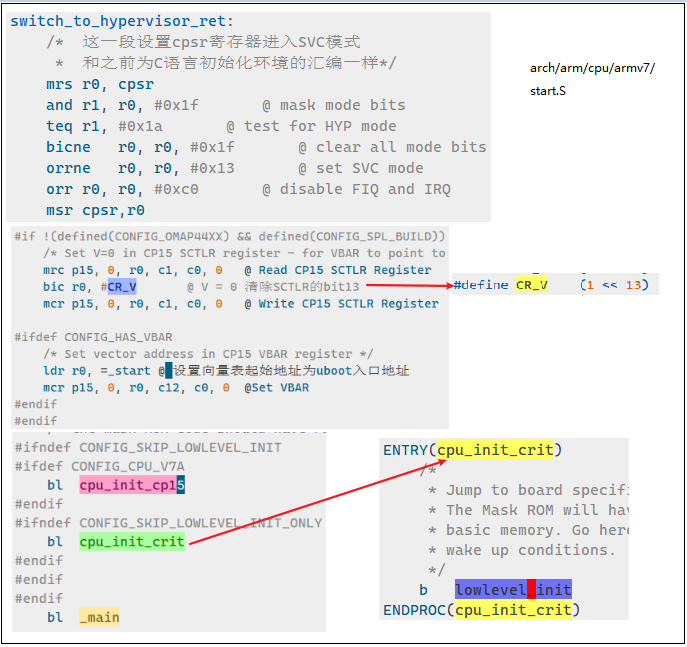
其中清除SCTLR的bit13(向量表控制位),是为了后面对向量表的重定向,不然不能重定向。
函数最后调用cpu_init_crit和_main,进一步跳转。cpu_init_crit调用lowlevel_init,没有其他操作了。整体调用路径为: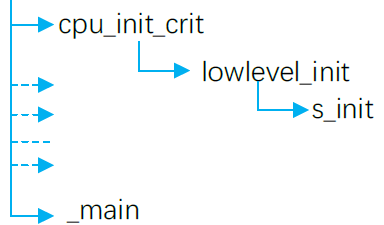
lowlevel_init
该函数主要是调用s_init做一些低层次的初始化工作。基本步骤是:初始化栈指针SP,之后就可以调用C语言函数了: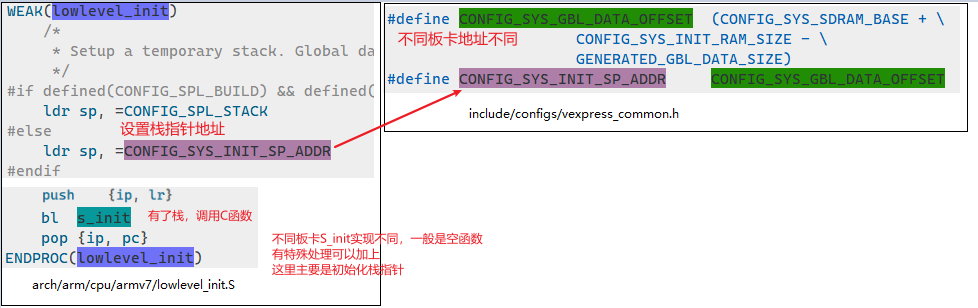
Arm 64bit流程
从/arch/arm/cpu/armv8/u-boot.lds可以看到,64bit架构的启动入口也是_start,不同实现位置不同:
_start
函数定义在arch/arm/cpu/armv8/start.S,其中lowlevel_init和上面的操作基本一样(可以根据不同CPU进行修改)。最后调用_main,和arm32流程汇合了。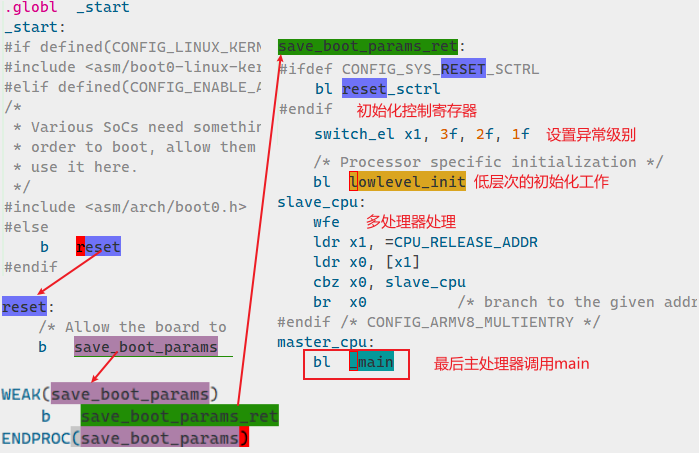
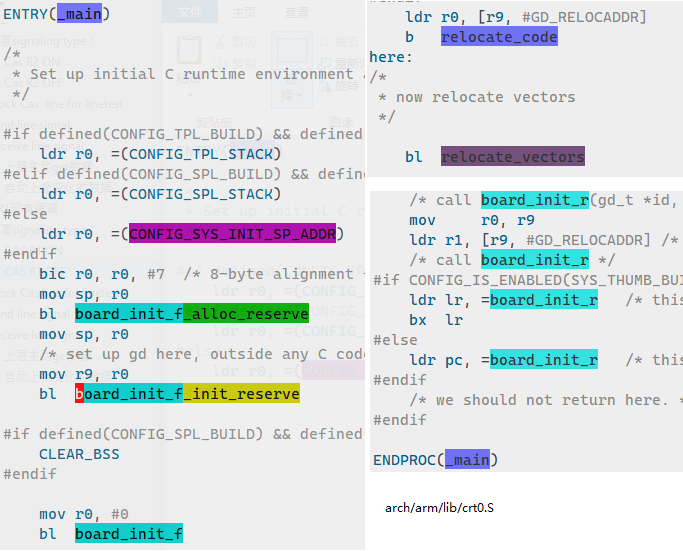
_main
进入main函数,32/64 bit不同架构的路程就基本统一了:arch/arm/lib/crt0.S,arch/arm/lib/crt0_64.S。
和lowlevel_init类似,先初始化SP指针,然后调用如下C语言函数:
- board_init_f_alloc_reserve:主要是留出早期的 malloc内存区域和 global data内存区域,返回新的top值。示例如下:
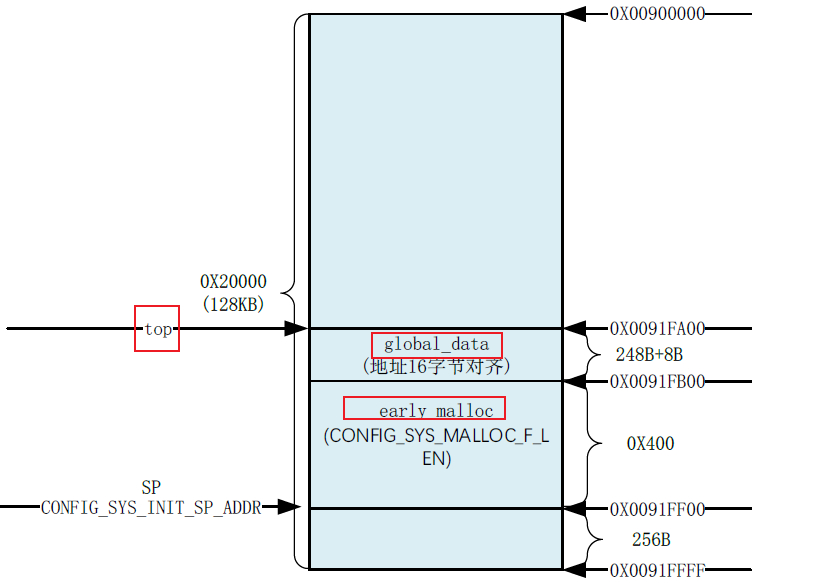
- board_init_f_init_reserve:初始化global data内存
- board_init_f:初始化 DDR,定时器等外设,完成代码拷贝等
- relocate_code:代码重定位,也就是代码重定位函数,此函数负责将 uboot拷贝到新的地方
- relocate_vectors:对中断向量表做重定位
- board_init_r:board_init_f并没有初始化所有的外设,还需要做一些后续工作
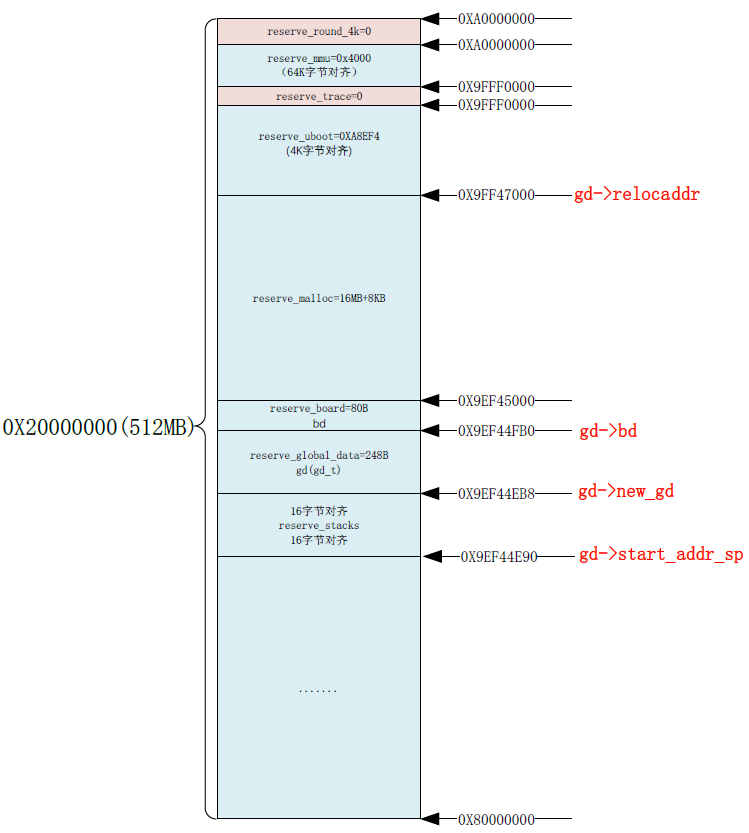
board_init_f
uboot会将自己重定位到 DRAM最后面的地址区域,也就是将自己拷贝到 DRAM最后面的内存区域中。这么做的目的是给 Linux腾出空间,防止 Linux kernel覆盖掉 uboot,将 DRAM前面的区域完整的空出来。在拷贝之前肯定要给 uboot各部分分配好内存位置和大小,为重定向做好准备。
board_init_f函数主要有两个工作:
- 初始化一系列外设,比如串口、定时器,或者打印一些消息等。
- 初始化 gd的各个成员变量
代码具体逻辑是,board_init_f内依次运行数组里的一系列静态函数,完成初始化工作:
// u-boot/common/board_f.c
void board_init_f(ulong boot_flags)
{
gd->flags = boot_flags;
gd->have_console = 0;
if (initcall_run_list(init_sequence_f)) //一系列的函数组成的数组
hang();
//...
}
init_sequence_f里的函数不在这里列举了,各有功能,其中有很多打印函数,可以在uboot启动时输出信息到屏幕上。我们会遇到很多跟数值有关的设置,如果直接看代码分析的话就太费时间 了,可以修改 uboot代码,直接将这些值在函数内打印出来。
relocate_code
复制代码段到新的地址:
/u-boot/arch/arm/lib/relocate.S
ENTRY(relocate_code)
//=========================复制代码段=======================
ldr r1, =__image_copy_start /* 拷贝目标首地址 */
subs r4, r0, r1 /* r4 <- relocation offset */
beq relocate_done /* skip relocation */
ldr r2, =__image_copy_end /* 拷贝目标结束地址 */
copy_loop:
ldmia r1!, {r10-r11} /* 从源地址读取数据*/
stmia r0!, {r10-r11} /* 复制到目标地址*/
cmp r1, r2 /* 比较当前地址与结束地址是否相同,是否退出循环*/
blo copy_loop
uboot在链接时会通过位置无关码(ld -pie),使用-pie选项后会生成.rel.dyn段,用于解决地址重定位问题。
因此,在uboot代码段被复制之后,相应的.rel.dyn段也要进行重定向:
//======================重定位链接地址=======================
ldr r2, =__rel_dyn_start /* .rel.dyn段起始地址*/
ldr r3, =__rel_dyn_end /* .rel.dyn段结束地址*/
fixloop:
ldmia r2!, {r0-r1} /* 复制数据到r0-r1寄存器 */
and r1, r1, #0xff /* 计算数据的高8bit */
cmp r1, #R_ARM_RELATIVE /*判断是否是label */
bne fixnext /* 不是跳转到下一函数 */
add r0, r0, r4
ldr r1, [r0]
add r1, r1, r4
str r1, [r0] /* 将重定位后的地址写入重定位后的label */
fixnext:
cmp r2, r3 /* 判断是否需要结束函数 */
blo fixloop
relocate_vectors
重定位向量表,主要是两句代码:
ldr r0, [r9, #GD_RELOCADDR] /* 复制重定位地址到r0寄存器 */
/* 将r0的值写入到 CP15的 VBAR寄存器中,也就是将新的向量表首地址写入到寄存器VBAR中,设置向量表偏移。*/
mcr p15, 0, r0, c12, c0, 0
board_init_r
该函数和**board_init_f**一样,也是执行一系列的静态函数。函数都定义在init_sequence_r中,主要是一些软件层面的后期初始化函数:
//u-boot/common/board_r.c
#ifdef CONFIG_NEEDS_MANUAL_RELOC
for (i = 0; i < ARRAY_SIZE(init_sequence_r); i++)
init_sequence_r[i] += gd->reloc_off;
#endif
if (initcall_run_list(init_sequence_r))
hang();
在初始化函数执行完后,最后会执行**run_main_loop**函数(实际调用main_loop函数),用于等待用户主动进入命令模式,或自动引导LInux内核。
其中调用的主要函数有:
bootstage_mark_name:打印启动进度cli_init:初始化shell相关变量run_preboot_environment_command:获取preboot环境变量内容autoboot_command:检查等待倒计时是否结束,并决定是否自动启动linux内核cli_loop:命令模式下输入命令的处理是否自动启动内核
main_loop中会根据uboot环境变量bootcmd中的命令启动linux内核。在此之前会根据环境变量bootdelay的值循环等待用户中断autoboot。
如果在定义时间内没有按键输入,则根据命令启动linux内核: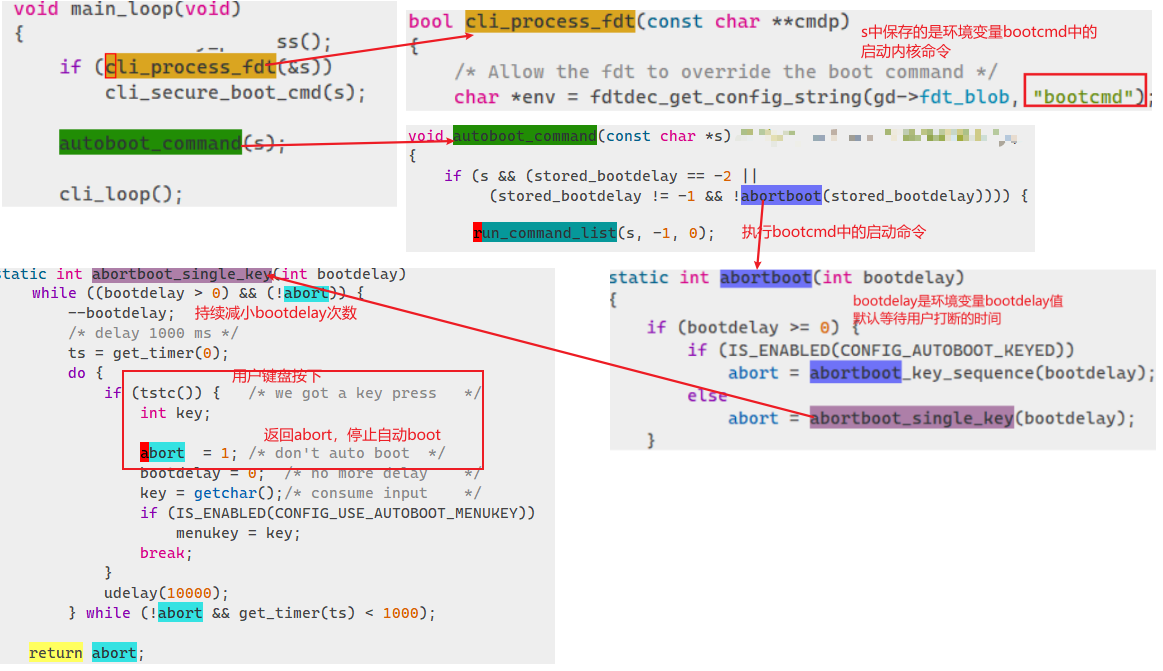
命令模式
主要分为两步:解析命令行形成结构体,执行命令。调用流程如下: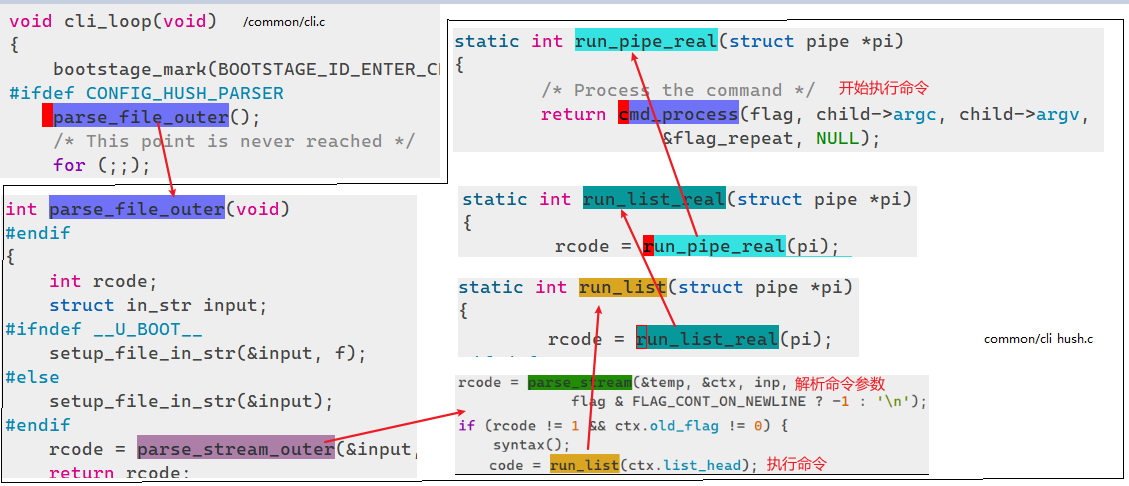
最终调用cmd_process来执行命令。cmd_process
uboot使用宏U_BOOT_CMD来定义命令,宏 U_BOOT_CMD定义在文件include/command.h。最终的目的就是为了定义一个cmd_tbl_t类型的变量,并初始化这个变量的各个成员。 uboot中的每个命令都存储在 .u_boot_list段中,每个命令都有一个名为 do_xxx的函数就是具体的命令处理函数。
处理函数do_xxx对应中**struct cmd_tbl**的cmd函数指针: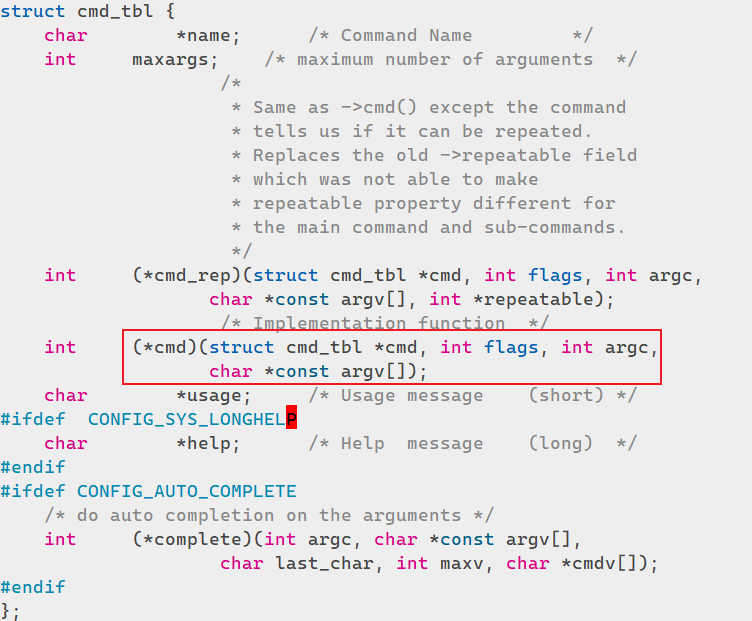
在cmd_process中,主要任务事根据用户输入的命令name找到对应的结构体对象,然后调用其cmd函数:
//common/command.c
enum command_ret_t cmd_process(int flag, int argc, char *const argv[],
int *repeatable, ulong *ticks)
{
struct cmd_tbl *cmdtp;
//...
cmdtp = find_cmd(argv[0]); //在预定义的命令表中根据name找到命令
//...
if (!rc) {
rc = cmd_call(cmdtp, flag, argc, argv, &newrep); //执行该命令
}
if (rc == CMD_RET_USAGE)
rc = cmd_usage(cmdtp); //检查返回值,输出该命令的用法描述
}
}
static int cmd_call(struct cmd_tbl *cmdtp, int flag, int argc,
char *const argv[], int *repeatable)
{
//调用结构体中的处理函数
result = cmdtp->cmd_rep(cmdtp, flag, argc, argv, repeatable);
}

若有收获,就点个赞吧
0 人点赞
