CAN: ( Controller Area Network ) 控制器区域网络,由它发送和接收通讯信号,CAN总线是一种多主总线,通信介质可以是双绞线、同轴电缆或光纤。CAN协议采用通信数据块进行编码,取代了传统的站地址编码,使网络内的节点数在理论上不受限制。由于CAN总线具有较强的纠错能力、支持差分收发,因而适合高干扰环境,并具有较远的传输距。Can总线的传输数据非常快,可以达到每秒传输32bytes有效数据,这样可以有效保证数据的实效性和准确性。传统的轿车在机舱和车身内需要埋设大量线束以传递传感器采集的信号。
BOM: ( Bill of Material ) 物料清单 ————单一零件诸如图号、物料名称(材料类型)、重量、体积、设计修改审核号、物料生效日期等各种信息;组件或部件还包括外协件、外购件、通用件、标准件、借用件、各单一零件装配数量、部件图号等;总图(由零件、组件部件等装配而成)还包括包装、装件清单、技术文件、产品说明书、保修单等等信息,这些都是Bom信息的组成部分。
ECU: (Electronic Control Unit) 电子控制单元,,又称“行车电脑。它和普通的电脑一样,由微控制器(MCU)、存储器(ROM、RAM)、输入/输出接口(I/O)、模数转换器(A/D)以及整形、驱动等大规模集成电路组成。
它具有运算与控制的功能,发动机在运行时,它采集各传感器的信号,进行运算,并将运算的结果转变为控制信号,控制被控对象的工作。它还实行对存储器(ROM/FLASH/EEPROM、RAM)、输入/输出接口(I/O)和其它外部电路的控制;
BCM : (Body Control Module) 车身控制器模块,车身控制器通过信号来协调车内不同功能。他们管理众多车辆功能,包括门锁、报警声控制、内部和外部照明、安全功能、雨刮器、转向指示器和电源管理等。被绑定到车辆电子架构的BCM在减少必需插件连接和电缆线束数量的同时,提供了最大化的可靠性和经济性。以下是汽车bcm的功能:
1、接收传感器输入的信息,将输入的信息转变为微处理器所能接收的信号;
2、输出执行命令后将弱信号转为执行命令,输出故障信息后进行修正;
3、运算分析,根据信息参数求出执行命令数据,将输入的信息与标准值对比;
4、存储、计算、分析处理信息,分析输出值所用的程序,存储该车型的特点参数、运算中的数据、存储故障信息。
ICM: (Ignition Control Module) 点火控制模块,控制发动机点火的模块
ECM: (Engineering Control Module) 发动机控制模块
PEPS: (Passive-Entry-Passive-Start) 指的是无钥匙系统,就是智能进入及启动系统。当驾驶者踏进指定范围时,系统即可识别出车辆授权的驾驶者并自动开门;离开车辆时,门锁会自动锁上并进入防盗状态。同时,无钥匙系统还可以记住所有的服务和诊断信息,例如座椅调整、空调设置、娱乐资讯等。
无钥匙系统是智能与便捷的结合,省去了很多繁杂的步骤,同时简化了汽车的操作。无钥匙系统主要经由四个部件完成操作:门把手开关、低频天线、车钥匙、高频接收器。工作原理为:
1、携带车钥匙走到车辆附近(车钥匙一定要有电),当按压车辆按钮或拉门把手时,车辆会收到点火或开锁的信号,并发送信号给低频天线。
2、低频天线收到信号后,会向车钥匙发出低频触发信号。
3、车钥匙接收到低频触发信号,发出高频解锁信号。
4、高频接收器收到高频解锁信号,整辆车完成解锁或点火。
BCS: *(Body Control System) 车身控制系统
EPB: (ELectrical Parking Brake) 电子手刹,和我们传统拉杆式手刹的功能是一样的。EPB功能工作时,ESC/ESP系统控制的是后轮手刹电机,只对后面两轮执行制动。
EMS: (Engine-Management-System) 发动机管理系统,俗称发动机电脑。
1、汽车上,通过发动机管理系统对发动机燃烧进行管理,有低油耗、低排放、高功率等优点。EMS采集各种传感器信号,如:发动机空气流量、防冻液温度、发动机转速、凸轮轴位置、节气门位置等。
2、EMS将这些信息进行处理,精确计算后输出控制信号。精确控制燃油供给量,控制点火提前角和怠速空气流量等,提高了发动机性能。通过喷油和点火的精确控制,可以降低污染物排放;采用氧传感器和三元催化转化器,降低有害物的排放。
TCU: (Transmission Control Unit) 即自动变速箱控制单元,常用于AMT、AT、DCT、CVT等自动变速器。实现自动变速控制,使驾驶更简单
EPB: (Electrical Park Brake) 电子驻车制动系统
ESP: (Electrical Stability Program) 电子稳定性系统
1)纠正车辆产生的过度转向或转向不足的现象,主动干预确保车辆操纵的稳定性
2)ESP系统通过采集车轮速度信号、制动主缸压力信号、制动开关信号、方向盘转角信号以及横摆和加速度信号等等,判断出驾驶员的意图和车辆的行驶状态,并通过电磁阀和泵电机的控制、发动机和变速箱控制调整等措施,使其在合适的车轮上施加制动力而对车辆产生纠正力矩,以纠正车辆产生的过度转向或转向不足的现象,主动干预确保车辆操纵的稳定性
DTC: (Diagnostic Trouble Code) 诊断故障代码,在不解体(或仅卸下个别零件)的条件下,确定汽车技术状况,查明故障部位及原因的检查。包括汽车发动机的检测与诊断,汽车底盘的检测与诊断,汽车车身及附件的检测与诊断以及汽车排气污染物与噪声的检测等内容
HMI: (Human Machine Interface) 人机交互界面,研究用户与机器、系统之间的交互关系。人机交互界面通常是指用户可感知的部分。用户通过人机交互界面与机器系统交流,并进行操作。小到收音机的播放按键,大到汽车的中控台或飞机飞船的仪表板。
汽车HMI主流的交互模式包括触控交互、语音交互、手势交互、视觉交互、嗅觉交互。
大体来说,整车上所以人为可操作的模块都属于HMI,如:空调按钮,娱乐副驾,HUD等
仅针对仪表来说,HMI可局限为:通过方向盘以及各种案件来调节仪表显示功能。如:按键切换菜单页面,播放音乐等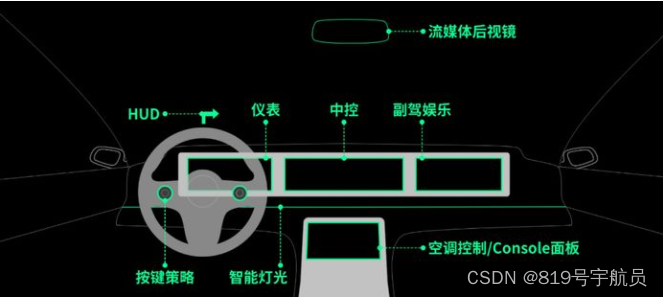
HIL: (Hardware-in-loop) 硬件在环仿真测试仿真测试是一种功能强大的测试方法,可以用于更加有效的测试嵌入式控制系统。当测试嵌入式控制系统时,从降低开发时间和成本的目的上考虑,使用全系统进行所有必要的测试是比较复杂的。可以理解为台架测试
TPMS: (Tire Pressure Monitoring System) 胎压监测系统,用来提示驾驶员轮胎状态的信息系统
IC / ICU: ( Instrument Cluster Unit) 数字化仪表,对仪表这个部件的简称
HU: 车载娱乐信息系统,对中控娱乐系统这个部件的简称
ACC: ( Adaptive Cruise Control) 自适应巡航,类似于传统的定速巡航控制,该系统包括雷达传感器,数字信号处理器和控制模块。
在自适应巡航系统中,系统利用雷达或红外线光束得到前车的确切位置,如果发现前车减速或监测到新目标,系统就会发送执行信号给发动机或制动系统来降低车速,从而使车辆和前车保持一个安全的行驶距离。
当前方道路障碍清除后又会加速恢复到设定的车速,雷达系统会自动监测下一个目标。acc代替司机控制车速,避免了频繁取消和设定巡航控制。自适应巡航系统适合于多种路况,为驾驶者提供了一种更轻松的驾驶方式。汽车T-BOX通过CAN总线与主机通信,实现指令和信息的传输,包括车辆状态信息、钥匙状态信息、控制指令等;通过音频连接,双方可以共享麦克风和扬声器输出
ADAS: ( Advanced Driving Assistance System) 即高级驾驶辅助系统,目前市面上把它分为17种子系统。 大部分属于L3级别。是一种利用安装于车上的各式各样的传感器, 在第一时间收集车内外的环境数据, 进行静、动态物体的辨识、侦测与追踪等技术上的处理, 从而能够让驾驶者在最快的时间察觉可能发生的危险, 以引起注意和提高安全性的主动安全技术。
T-BOX:汽车T-box主要用于与后台系统/移动应用进行通信,实现对移动应用的车辆信息显示和控制。用户通过移动应用发送控制命令后,TSP后台会向汽车T-box发送监控请求命令,此功能可以帮助用户远程启动车辆、打开空调、将座椅调整到适当位置等。
IACC:(integrated ACC) 集成式自适应巡航系统。( 按照国际汽车工程师学会发布的自动驾驶的六级分类体系,自动驾驶技术被分为L0至L5六个级别。其中,L0代表非自动化,L1代表辅助驾驶,L2代表部分自动化,L3代表有条件的自动驾驶,L4代表高度自动化,L5代表全自动化。世界上现在最先进的也就L3,比如说上次百度在五环上无人驾驶还被举报那一次,也无非就是L3,肯定不是我们一般人理解意义上的终极无人驾驶。)
IACC采用多传感器融合技术,融合毫米波雷达、多功能摄像头和导航地图(与高德合作),感知行驶道路环境,通过动力、制动、转向控制车辆自动加减速及转向,将车辆保持在车道中或跟随前方目标车轨迹自动驾驶。属于L2级的自动驾驶,功能如下:
1)单车道自动辅助驾驶:激活IACC后,车辆可以自动保持在车道内行驶。
2)自动辅助驾驶功能:在车速65km/h以上,车辆即将偏离车道时,仪表发出纠偏提示,并自动将车辆纠正回车道内——这时方向盘回正的力度还是比较大的
3)交通拥堵辅助驾驶:在堵车的情况下,车辆自动保持在车道内行驶或跟随前车行驶。大城市里上下班用上了,就大大省力了。
4)自动减速过弯:IACC激活后,摄像头会识别到前方弯道,系统判断进弯速度过高,则缓慢减速进弯,出弯后自动加速到驾驶员设定速度行驶。
5)预警辅助功能:在高速行驶中,跟车距离过近时车辆提醒驾驶员注意车距;如果车辆与前车存在碰撞危险,警示驾驶员采取避撞措施。针对运动及静止的行人、车辆,碰撞即将发生且驾驶员未制动时,车辆还会主动进行制动。
6)语音设定巡航速度: IACC激活后,可通过语音控制设定巡航速度,当然你手动定速也没问题。
7)智能限速辅助:在非高速道路上,IACC激活后,如果巡航车速大于识别到的限速标志牌时,系统自动将巡航速度设定为当前限速。
HUD:( Head-up Display) 抬头显示
CCS:( CRUISE CONTROL SYSTEM) 定速巡航系统,顾名思义,就是设定了一定的速度,汽车就会按照这个速度一直跑下去。
TJA:( Traffic Jam Assist) 交通拥堵辅助系系统。主要针对车速较低时(一般是0-60Km/h),为驾驶员同时提供横向和纵向的辅助控制功能。当路面上有清晰车道线而且自车前方一定距离内没有参考车辆时,TJA功能能控制车辆以一定的车速在车道线中间位置行驶。而如果车辆前方有参考车辆时,TJA功能能控制车辆按照前车的行驶轨迹行驶,并主动控制自车的加减速,控制车辆和前车保持一定的时距。
ICA:( Integrated Cruise Assist) 集成式巡航辅助系统在车速较高时(一般大于60Km/h)为驾驶员提供横向和纵向的辅助驾驶功能。ICA功能基本上可以看作是ACC和LKA功能的组合,控制车辆以一定的车速在车道线内行驶。ICA和TJA功能不同的是,ICA工作车速更高,而且ICA始终把车辆维持在车道中心附近行驶,不具备无车道线时的跟车行驶功能。
DTE:( distance till empty) 续航里程
CFE :表示最近100km 内的油耗
RFL:当前剩余油量
IFC:瞬时油耗
AFC:平均油耗
PPK:( Pulse Per Kilometer) 每公里脉冲数
ODO:( odograph) 总计里程
AUTOSAR:(AUTomotive Open System ARchitecture) 汽车开放式系统架构,。这是一个由整车厂,零配件供应商,以及软件、电子、半导体公司合起来成立的一个组织。自从2003年以来,就致力于为汽车电子行业提供一个开放的、标准的软件架构。
ASPICE:(Automotive Software Process Improvement and Capacity Determination) 汽车软件过程改进及能力评定,是汽车行业用于评价软件开发团队的研发能力水平的模型框架。ASPICE能力等级
ASPICE根据企业管理的细致和严谨程度不同,将企业的软件研发能力划分为6个级别,0级为最低级,5级为最高级。级别越高代表研发项目出现意外情况的可能性更低,企业对项目和产品的成功掌控力越强,越有能力按时向客户交付高质量的产品。
【0级】代表一种混乱的状态。
【1级】代表企业已经能够完成产品研发相关的工作,但缺乏管理,虽然偶尔能够成功,但项目中存在大量不确定的因素,对项目缺乏掌控能力,无法确保一定能够按时交付高质量的产品。
【2级】代表企业不仅能够完成产品研发相关工作还能有提前制定严谨和周全的工作计划,并能有效根据计划实施项目监控和管理,各项目能够有序进行。
【3级】代表不仅各项目能够管理得很好,而且能够有效的从历史项目中积累经验和教训,形成公司的知识资产和标准工作流程,用于对今后项目的参考和指导以及公司管理的持续改善。
【4级】引入统计学知识和技术,对项目相关各项数据进行统计和分析,并将之运用于未来的项目管理之中,达到对项目结果的预测,并根据预测结果对项目进行实时的调整,确保达成项目目标。
【5级】代表企业能够基于商业目标的需要,主动的对过程进行调整,对变革管理有很强的管理能力,能够基于对过程的量化分析设定明确有效的过程改进目标,并能对过程改进结果进行有效的量化监控和分析。
EEPROM:(Electrically Erasable Programmable read only memory) 是指带电可擦可编程只读存储器。是一种掉电后数据不丢失的存储芯片。 EEPROM 可以在电脑上或专用设备上擦除已有信息,重新编程。一般用在即插即用。汽车电子行业中,总计里程ODO一般村粗在EEPROM里
ROM:(Read-Only Memory) 只读存储器, 以非破坏性读出方式工作,只能读出无法写入信息。信息一旦写入后就固定下来,即使切断电源,信息也不会丢失,所以又称为固定存储器。
RAM:(Random Access Memory) 随机存取存储器,也叫主存,是与CPU直接交换数据的内部存储器。它可以随时读写(刷新时除外),而且速度很快,通常作为操作系统或其他正在运行中的程序的临时数据存储介质。RAM工作时可以随时从任何一个指定的地址写入(存入)或读出(取出)信息。它与ROM的最大区别是数据的易失性,即一旦断电所存储的数据将随之丢失。RAM在计算机和数字系统中用来暂时存储程序、数据和中间结果
GW:(Gateway) 网关
PQA:(Process Quality Assurance) 即全程质量检测认证,确保产品开发按照公司既定的IPD流程进行,全流程统筹协调各功能领域的质量保证活动。PQA相当于一个产品质量管理者和流程质量管理者。PQA确保产品开发按照公司既定的流程进行,全流程统筹协调各功能领域的质量保证活动。PQA是产品开发流程和质量活动的引导、培训者,是产品和流程过程质量活动的审计和监控者。PQA是产品质量策划者,是产品级质量目标和质量控制计划的制订者,是产品质量目标执行和质量计划执行的分析、监控者
PQE:(Product Quality Engineer) ,产品质量工程师,重点要熟悉产品的制程,分析和解决产品制造过程中出现的质量问题。以下是PQE工作内容:
依据新产品和物料试产要求,审核新产品资料汇总表内容、试产结果、 PFMEA报告。
审核产品质量计划(QC工程图),审批产品检验标准和作业指导书,评估检验工装治具的效用及对检验员进行培训的效果。
生产、PQC、OQC发现的过程/产品缺陷,监督指导分析和处理过程,总结提炼并指导经验的运用。
指导客诉、客退反映的过程/产品缺陷分析,审核客诉报告。
制程、检验质量数据和报表的分析,总结提炼并指导闭环处理。
依据产品制程可靠性/ORT要求,审批产品制程可靠性/ORT实验方案。
依据客户对产品制程质量数据的需求,审核相关的质量数据报表。
将内外部临时发生信息(检验要求、退料要求、出货要求)整理传递并监督执行情况。
制定半成品、成品RoHS检测方案审核。
指导内外部审核及纠正、预防措施的实施。
依据物料/产品试产要求,跟踪回复试产结果。
跟进产品的品质状况,处理客户投诉并提供解决措施,并负责客户所需相关测试参数的收集及传递。
IVI:(In-Vehicle Infotainment ) 车载信息娱乐系统,即车机中控,是采用车载专用中央处理器,基于车身总线系统和互联网服务,形成的车载综合信息处理系统。IVI能够实现包括三维导航、实时路况、IPTV、辅助驾驶、故障检测、车辆信息、车身控制、移动办公、无线通讯、基于在线的娱乐功能及TSP服务等一系列应用,极大的提升了车辆电子化、网络化和智能化水平。
VCU:(Vehicle Control Unit ) 汽车控制单元,它通过CAN总线与汽车的发动机、变速器、油门踏板、制动踏板、车身控制器等各种电子设备通信,读取各个控制单元的工作状态,并在需要时对它们进行控制。如下图所示。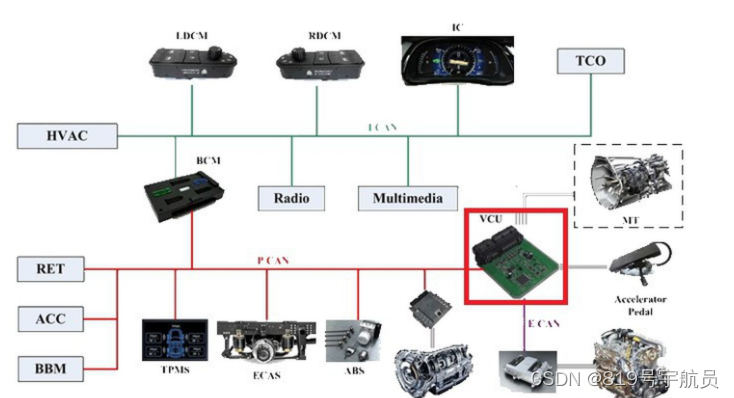
如果把汽车比做人,那么VCU就是人的大脑。这里记载了汽车底盘的状态(车速、油门踏板开度、制动踏板状态、方向盘转角等)、汽车车身的状态(车门状态、车窗状态、前照灯状态、转向灯状态等)以及发动机的状态(转速,输出扭矩、燃油消耗等)。
SOP:(Start of Production ) 正式生产,是项目进度阶段的描述
LIN:(Local Interconnection Network ) 本地互联网络,局域互联,表示所有的 控制单元都装在一个有限的空间内(如车顶),所以它也被称为“局域子系统”。
SWC:(Steering Wheel Controls )方向盘控制按键
LVDS:(Low-Voltage Differential Signaling)低电压差分信号,是一种低功耗、低误码率、低串扰和低辐射的差分信号技术,这种传输技术可以达到155Mbps以上,LVDS技术的核心是采用极低的电压摆幅高速差动传输数据,可以实现点对点或一点对多点的连接,其传输介质可以是铜质的PCB连线,也可以是平衡电缆。
EEA:(Electrical/Electronic Architecture),电子电气架构,是首先由德尔福公司提出的,集合汽车的电子电气系统原理设计、中央电器盒的设计、连接器的设计、电子电气分配系统等设计为一体的整车电子电气解决方案的概念。
KO:项目Kick Off会议
TPM:技术项目经理
AVNT:智能互联系统
IHU:(Intelligent Head Unit)智能车机
FAPA:(Full-Automation Parking Assist)自动泊车辅助
IBCM:(Integration Body Control Module)集成车身控制模块
EBS:(Electronic Battery Sensor)电子电池传感器
VMM:(Vibration Monitoring Module)振动监测模块
JNI—Java Native Interface的缩写,通过使用 Java本地接口书写程序,可以确保代码在不同的平台上方便移植。从Java1.1开始,JNI标准成为java平台的一部分,它允许Java代码和其他语言写的代码进行交互。JNI一开始是为了本地已编译语言,尤其是C和C++而设计的,但是它并不妨碍你使用其他编程语言,只要调用约定受支持就可以了。使用java与本地已编译的代码交互,通常会丧失平台可移植性。但是,有些情况下这样做是可以接受的,甚至是必须的。例如,使用一些旧的库,与硬件、操作系统进行交互,或者为了提高程序的性能。JNI标准至少要保证本地代码能工作在任何Java 虚拟机环境。
HCI—Host Controller Interface,HCI就是HOST和Controller之间的通道。用来桥接Host和Controller Devices。HCI是一个标准的蓝牙用的接口,用来Host发给Controller命令,HOST从controller接收events,和HOST发给Controller数据,和从HOST从Controller接收数据。HOST就是指我们的主控芯片,Microcontroller/ MCU / μCON / MPU等,比如我正在使用的是iMX6ULL芯片。Controller就是蓝牙芯片了,比如我比较熟悉的TI的CC2564芯片。
FL:FeatureList,功能清单
PFET:部分功能工程设计验证阶段
FFET:全功能工程设计验证阶段
PT:试生产验证阶段

若有收获,就点个赞吧
0 人点赞
