- 大纲
- 标准各部分详细介绍
- Part 1 Data link layer and physical signalling数据链路层和物理信令
- Part 2 High-speed medium access unit高速物理媒体附属层
- Part 3 Low-speed, fault-tolerant, medium-dependent interface低速容错物理媒体附属层
- Part 4 Time-triggered communication时间触发通讯
- Part 5 High-speed medium access unit with low-power mode低功耗的物理媒体附属层
- Part 6 High-speed medium access unit with selective wake-up functionality选择性唤醒的物理媒体附属层
大纲
Part 1
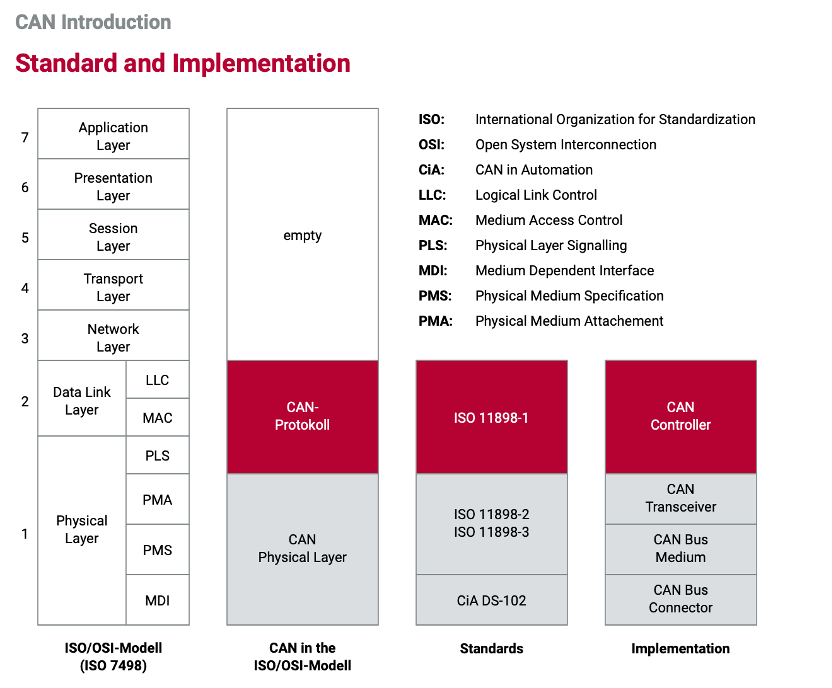
CAN协议的描述,除了数据通信的参考模型,CAN协议仅包括:
1)数据链路层(介质访问控制子层MAC -Medium Access Control和逻辑链路控制子层LLC - Logical Link Control)
2)物理层(物理信号PLS - Physical Signaling)
Part 2
高速CAN,最大1 Mbit/s,用于车辆的动力系统和底盘系统;
Part 3
Part 4
是数据链路层的扩展,为CAN网络增加了时间触发的通信选项,ISO 11898-1定义了事件驱动通信。总线负载较高可能会导致延迟,对于优先级较低的CAN报文来说尤其如此。若要确保在CAN网络中实现确定性通信,可以使用ISO 11898-4;
标准各部分详细介绍
Part 1 Data link layer and physical signalling数据链路层和物理信令
ISO 11898-1:2015规定了在实现CAN数据链路层的模块之间设置数字信息交换的特点。控制器局域网是一种串行通信协议,支持分布式实时控制和多路复用,用于道路车辆和其他控制应用程序。
ISO 11898-1:2015指定了经典CAN帧格式和新引入的CAN灵活数据速率帧格式。经典的CAN帧格式允许高达1 Mbit/s的比特率和高达8字节的有效负载。灵活的数据速率帧格式允许比特率高于1 Mbit/s,有效负载长于每帧8字节。
ISO 11898-1:2015根据ISO/IEC 7498-1的开放系统互连(OSI)ISO参考模型,从分层层的角度描述了CAN的一般架构。CAN数据链路层根据ISO/IEC 8802-2和ISO/IEC 8802-3指定。
ISO 11898-1:2015包含以下详细规格:逻辑链路控制子层;介质访问控制子层;以及物理编码子层。
有三种实施选项。它们如下:仅支持经典CAN帧格式,不容忍灵活数据速率帧格式;支持经典CAN帧格式并容忍灵活数据速率帧格式;支持经典CAN帧格式和灵活数据速率帧格式。
Part 2 High-speed medium access unit高速物理媒体附属层
ISO 11898-2:2016规定了控制器局域网(CAN)的高速物理介质附件(HS-PMA),该协议支持分布式实时控制和多路车辆中的多路复用。这包括没有低功耗模式功能以及具有选择性唤醒功能的HS-PMA。物理媒体依赖子层不在本文档范围内。
Part 3 Low-speed, fault-tolerant, medium-dependent interface低速容错物理媒体附属层
ISO 11898-3:2006 规定了在传输速率高于 40 kBit/s 至 125 kBit/s 的道路车辆的电子控制单元之间建立数字信息交换的特性,该电子控制单元配备有控制器局域网 (CAN)。
Part 4 Time-triggered communication时间触发通讯
ISO 11898 的这一部分规定了控制器局域网 (CAN) 中的时间触发通信:一种串行通信协议,支持在道路车辆中使用的分布式实时控制和多路复用。它适用于在配备 CAN 的道路车辆的电子控制单元 (ECU) 之间建立时间触发的数字信息交换,并根据 ISO 规定协调逻辑链路和媒体访问控制操作的帧同步实体11898-1,提供时间触发的通信时间表。注 时间触发 CAN 是 CAN 协议本身的更高层协议层,在时间触发通信中保持不变。时间触发的通信将每条消息的延迟时间保持在指定值,与 CAN 总线负载无关。时间触发的 CAN 在两个级别上实现:级别 1 仅限于循环消息传输,而级别 2 此外还支持全局系统时间。时间触发 CAN 的循环、周期性通信基于时间主站传输的参考消息。每个以参考消息开始的周期称为一个基本周期,并被细分为几个时间窗口。参考消息用于将所有节点的时基同步和校准到时间主控器的时基,为网络提供全局时间。为替代时间主机提供了一种机制,以替代失败的时间主机。
Part 5 High-speed medium access unit with low-power mode低功耗的物理媒体附属层
ISO 11898-5:2007 规定了 CAN 物理层,用于在道路车辆中使用的传输速率高达 1 Mbit/s。 它根据 ISO 8802-2 描述了介质访问单元功能以及一些与介质相关的接口特性。
ISO 11898-5:2007 代表 ISO 11898-2 的扩展,为需要低功耗特性但没有活动总线通信的系统处理新功能。
根据 ISO 11898-5:2007 的物理层实现符合 ISO 11898-2 的所有参数,但在 ISO 11898-5:2007 中的定义不同。 根据 ISO 11898-5:2007 和 ISO 11898-2 的实施是可互操作的,并且可以在一个网络中同时使用。
Part 6 High-speed medium access unit with selective wake-up functionality选择性唤醒的物理媒体附属层
ISO 11898-6:2013 规定了传输速率高达 1 Mbit/s 的控制器局域网 (CAN) 物理层。 它描述了媒体访问单元 (MAU) 功能。
ISO 11898-6:2013 代表 ISO 11898 2 和 ISO 11898 5 的扩展,指定使用可配置 CAN 帧的选择性唤醒机制。
根据 ISO 11898-6:2013 的物理层实现符合 ISO 11898 2 和 ISO 11898 5 的所有参数。根据 ISO 11898-6:2013、ISO 11898 2 和 ISO 11898 5 的实现是可互操作的,并且可以在 同时在一个网络内。

若有收获,就点个赞吧
0 人点赞
