4.1 等待事件或等待其他条件
如果线程A 需要等待线程B 完成任务,可以采取几种不同方式:
- 方式一:在共享数据内部维护一个标志(受互斥保护),线程B 完成任务后,就设置标志成立。
该方式存在双重浪费:
- 线程A 必须不断查验标志,浪费原本有用的处理时间,会限制线程B 的可用算力;
- 一旦互斥被锁住,其他任何线程都无法再加锁。线程A 每次查验标志,都要锁住互斥量以施加保护,那么此时若线程B 刚好同时完成任务,即想要设置标志成立,则无法对互斥加锁。
方式二:让线程A 调用
**std::this_thread::sleep_for()**函数,在各次查验之间短期休眠:bool flag;std::mutex m;void wait_for_flag(){std::unique_lock<std::mutex>lk(m);while(!flag){lk.unlock();std::this_thread::sleep_for(std::chrono::milliseconds(100));lk.lock();}}
然而休眠时间的长短难以预知,太短则线程仍然会频繁查验,消耗处理时间;太长则令线程过度休眠,如果线程B 完成了任务,线程A 却没有被及时唤醒,就会导致延迟。
方式三:使用C++标准库的工具等待事件发生——条件变量。
4.1.1 凭借条件变量等待条件成立
C++标准库提供了两种条件变量的实现:std::condition_variable和std::condition_variable_any。都需要配合互斥量才能提供同步操作。std::condition_variable仅限与std::mutex一起使用;然而只要某一类型符合成为互斥的最低标准,足以充当互斥,std::condition_variable_any就可以与之配合使用,因此其后缀是_any。由于后者更佳通用,可能产生额外开销,涉及其性能、自身体积或系统资源等,所以前者应该优先采用。
std::condition_variable的wait()函数有第二个可选参数,接受一个bool类型,当值为false时就会被阻塞在这里,只有当该线程被唤醒后,且第二参数为true时才会往下运行。
std::condition_variable必须和std::unique_lock搭配而不能和std::lock_guard搭配的原因在于:线程A 在等待期间,必须解锁互斥,而等待结束之后,必须重新加锁,但是**std::lock_guard**不能提供这种灵活性。
假设线程A 在休眠时,互斥依然被锁住,那么即使线程B 备妥了数据,也不能锁住互斥,也就无法将其添加到队列中。结果就是线程A 等待的条件永远无法成立,会无休止地等待下去。
在wait()调用期间,条件变量可以多次查验给定条件,次数不受限制。在查验时互斥量总会被锁。另外,当且仅当传入的判定函数返回 true 时,**wait()**才会立即返回。
如果线程A 重新获得互斥,并且查验条件,而这一行为却不是直接响应线程B 的通知,则称之为虚假唤醒。这种虚假唤醒出现的数量和频率不也得,因此,若判定函数有副作用,则不建议用作查验条件。
e.g. 每次被调用时,判定函数就 顺带提高所属线程的优先级,该提升动作即产生的副作用。结果,多次伪唤醒可“意外 地”令线程优先级变得非常高。
std::condition_variable::wait()本质上是忙等的优化,下列代码是wait()一种合法实现,仅使用了一个简单地循环,但效率不尽如人意:
template<typename Predicate>void minimal_wait(std::unique_lock<std::mutex>& lk, Predicate pred){while(!pred){lk.unlock();lk.lock();}}
在线程之间传递数据常见的方法就是运用队列。若队列实现到位,同步操作就可以呗限制在内部,从而大幅减少可能出现的同步问题和竞态条件。
4.1.2 利用条件变量构建线程安全的队列
由于接口之间存在固有的竞态条件,所以需要吧front()和pop()合并成一个函数。
而当队列用于线程间数据传递时,负责接收的线程尝尝需要等待数据压入。所以对外提供pop()的两个变体:try_pop()和wait_and_pop():它们都试图弹出队首元素,前者总是立即返回,即便队列内没有元素;后者会一直等到有数据压入可供获取。
#include <iostream>#include <thread>#include <condition_variable>#include <mutex>#include <memory>#include <queue>template<typename T>class threadsafe_queue{private:mutable std::mutex mut;std::queue<T> data_queue;std::condition_variable data_cond;public:threadsafe_queue(){}threadsafe_queue(threadsafe_queue const& other){std::lock_guard<std::mutex>lk(other.mut);data_queue = other.data_queue;}void push(T new_value){std::lock_guard<std::mutex>lk(mut);data_queue.push(new_value);data_cond.notify_one();}void wait_and_pop(T& value){std::unique_lock<std::mutex> lk(mut);data_cond.wait(lk, [this]{return !data_queue.empty();});value = data_queue.front();data_queue.pop();}std::shared_ptr<T> wait_and_pop(){std::unique_lock<std::mutex> lk(mut);data_cond.wait(lk, [this]{return !data_queue.empty();});std::shared_ptr<T> res(std::make_shared<T>(data_queue.front()));data_queue.pop();return res;}bool try_pop(T& value){std::lock_guard<std::mutex>lk(mut);if(data_queue.empty())return false;value = data_queue.front();data_queue.pop();return true;}std::shared_ptr<T> try_pop(){std::lock_guard<std::mutex>lk(mut);if(data_queue.empty())return std::shared_ptr<T>();std::shared_ptr<T> res(std::make_shared<T>(data_queue.front()));data_queue.pop();return res;}bool empty() const{std::lock_guard<std::mutex> lk(mut);return data_queue.empty();}};
#include"threadsafe_queue.h"#include<vector>using namespace std;threadsafe_queue<int>tq{};vector<int>vec{};void pushIntoQueue(){for(int i = 0; i < 50; ++i){tq.push(i);}}void popFromQueue(){int i = 50;while(i--){vec.push_back(*tq.wait_and_pop());}}auto main()->int{std::thread t1(popFromQueue);std::thread t2(pushIntoQueue);t1.join();t2.join();for(auto i : vec){cout<<i<<" ";}return 0;}
然而,假定某个线程按计划仅仅等待一次,只要条件成立一次,它就不再理会条件变量。条件变量未必是这种同步模式的最佳选择。若我们所等待的条件需要判定某份数据是否可用,那么future更适合此场景。
4.2 使用 future 等待一次性事件发生
C++标准库使用future模拟一次性事件:若线程需等待某个特定的一次性事件发生,则会以恰当的方式得到一个**future**。其代表目标事件,接着该线程就能一边执行其他任务,一边在**future**上等待,同时它以短暂的间隔反复查验目标事件是否已经发生。
C++有两种future,分别由两个类模板实现:
- 独占
**future**:即std::future<>,同一事件仅允许关联唯一一个**std::future**实例; - 共享
**future**:即std::shared_future<>,同一事件允许关联多个**std::shared_future**实例。只要目标事件发生,与后者关联的所有实例就会同时就绪,并且全都可以访问与该目标事件关联的任何数据。
关联数据就是两种future以模板形式实现的原因:模板参数就是关联数据的类型。如果没有关联数据,就应该使用特化的模板std::future<**void**>和std::shared_future<**void**>。
虽然**future**可以用于线程间通信,但是**future**本身不提供同步访问。若多个线程需访问同一个future对象,必须使用互斥或其他同步方式保护。
一个**std::shared_future<>**对象可能派生出多个副本,这些副本都指向同一个异步结果,由多个线程分别独占,它们可以访问属于自己的那个副本而无须互相同步。
最基本的一次性事件就是后台运行的计算任务完成,得出结果。**std::thread**并不能提供简洁的方式从计算任务返回求得的值。现在可以利用**future**来获得:
4.2.1 从后台任务返回值
只要不急需线程运算的值,就可以使用**std::async()**按异步方式启动任务。从std::async()函数处获得std::future对象,运行的函数一旦完成,其返回值就由该对象最后持有。若要用到这个值,只需要在**future**对象上调用**get()**,当前线程就会阻塞,以便future准备妥当并返回该值。
#include<future>#include<iostream>using namespace std;int find_answer_to_ltuae(){return 100;}void do_other_stuff(){std::cout<<"do_other_stuff ing......"<<std::endl;}auto main()->int{std::future<int> the_answer = std::async(find_answer_to_ltuae);do_other_stuff();std::cout<<"The answer is: "<<the_answer.get()<<std::endl;}
与std::thread的构造函数相同,std::async可以接受附加参数,进而传递给任务函数作为其参数。若要异步运行某个类的成员函数,则**std::async**的第一个参数应该是一个函数指针,指向该类的目标成员函数,第二个参数需要给出相应的对象(可以是指向对象的指针、对象本身或由std::ref包装的对象)。
HINT:如果**std::async()**的参数是右值,则通过移动原始参数构建副本,与复制std::thread实例相同。
Example 1:
Example 2: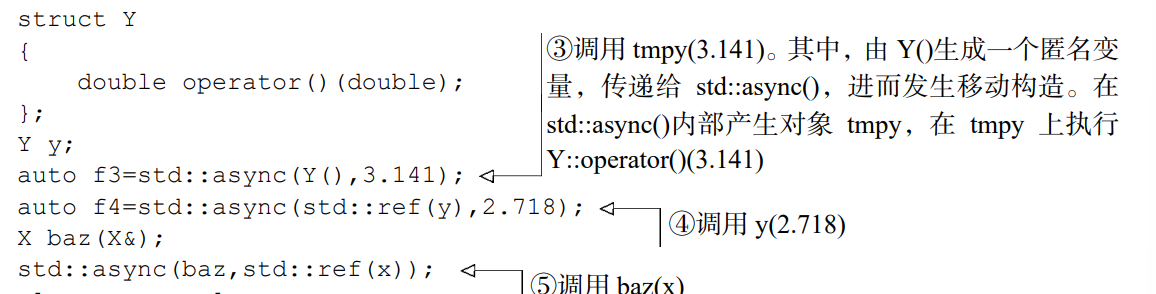
默认情况下,std::async()的具体实现会自行决定——等待**future**时,是启动新线程,还是同步执行任务。大多数情况下,这样就可以了。
不过为了更加可控,可以给**std::async()**补充一个参数,作为第一参数,指定采用哪种运行方式。参数类型是std::launch,其值可以是:
std::launch::deferred,指定在当前线程上延后调用任务函数,等到在**future**上调用了**wait()**或**get()**,任务函数才会执行;std::launch::async指定必须另外开启专属的线程,在其上运行任务函数。
若延后调用任务函数,则任务函数可能永远不会运行: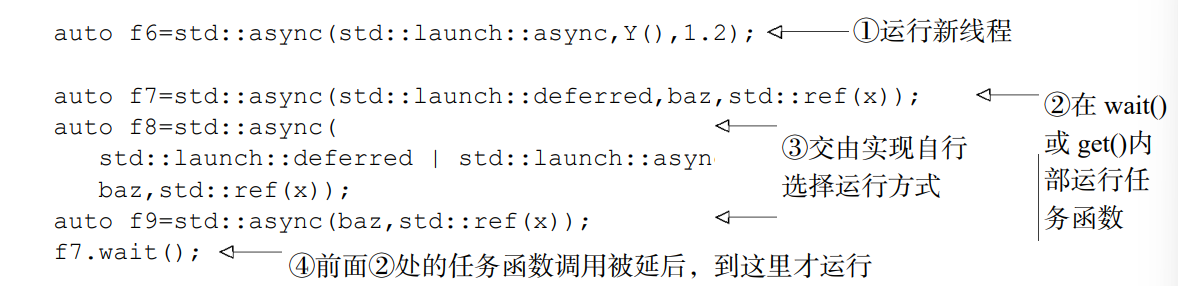
使std::future和任务关联并非唯一的方法:
- 运用类模板
**std::packaged_task<>**的实例,也能将任务包装起来; - 或者利用
**std::promise<>**类模板显式地异步求值。
4.2.2 关联 future 实例和任务
**std::packaged_task<>**连结了**future**对象与函数(或可调用对象)。std::packaged_task<>对象在执行任务时,会调用关联的函数(或可执行对象),把返回值保存为**future**的内部数据,并令future准备就绪。
如果一项操作能分解为多个子任务,则可以把它们分别包装到多个std::packaged_task<>实例中,再传递给任务调度器或线程池。这就隐藏了细节,使任务抽象化,让调度器可以专注处理std::packaged_task<>实例,无须纠缠于各种不同的任务函数。
std::packaged_task<>是类模板,其模板参数是函数签名。但也不必严格匹配, 若某函数接收int类型参数并返回float值,我们则可以为其构建std::packaged_ task<double(double)>的实例,因为对应的类型可进行隐式转换。
类模板std::packaged_task<>具有成员函数get_future(), 返回std::future<>实例。该**future**特化类型取决于函数签名所指定的返回值。std::packaged_task<>还具备函数调用操作符,其参数取决于函数签名的参数列表。
template<>class packaged_task<std::string(std::vector<char>*,int)> {public:template<typename Callable>explicit packaged_task(Callable&& f);std::future<std::string> get_future();void operator()(std::vector<char>*,int);};
**std::packaged_task<>**对象是可调用对象,可以直接调用,还可以将其包装在std::function对象内,当做线程函数传递给std::thread对象,也可以传递给需要可调用对象的函数。
若std::packaged_task<>作为函数对象而被调用,就会通过函数调用操作符接收参数,并将其进一步传递给包装在内地的任务函数,由其异步运行得出结果,并将结果保存到**std::future**对象内部,再通过**get_future()**获取此对象。
因此,为了在未来的适当时刻执行某项任务,可以将其包装在std::packaged_task<>对象内,取得对应的**future**之后,才把该对象传递给其他线程,由它触发任务执行。等到需要使用结果时,等待**future**准备就绪即可。
线程间传递任务
许多 GUI 框架都设立了专门的线程,作为更新界面的实际执行者。若别的线程需要更新界面,就必须向它发送消息。由它执行对应操作。
该模式可以使用std::packaged_task实现:
#include<iostream>#include<deque>#include<mutex>#include<future>#include<thread>#include<utility>using namespace std;std::mutex m;std::deque<std::packaged_task<void()>>tasks;bool gui_shutdown_message_received();void get_and_process_gui_message();void gui_thread(){ //1while(!gui_shutdown_message_received()){ //2get_and_process_gui_message(); //3std::packaged_task<void()>task;{std::lock_guard<std::mutex>lk(m);if(tasks.empty()) //4continue;task = std::move(tasks.front()); //5tasks.pop_front();}task(); //6}}std::thread gui_bg_thread(gui_thread);template<typename Func>std::future<void> post_task_for_gui_thread(Func f){std::packaged_task<void()> task(f); //7std::future<void>res = task.get_future(); //8std::lock_guard<std::mutex> lk(m);tasks.push_back(std::move(task)); //9return res; //10}
在 GUI 线程上①,轮询任务队列和待处理的界面消息(如用户的单击)③;若有消息指示界面关闭,则循环终止②。假如任务队列一无所有,则循环继续④;否则,就从中取出任务⑤,释放任务队列上的锁,随即运行该任务⑥。在任务完成时,与它关联的 future 会进入就绪状态。
向任务队列布置任务也很简单。依据给定的函数创建新任务,将任务包装在内⑦,并随即通过调用成员函数get_future(),取得与该任务关联的future⑧,然后将任务放入任务队列⑨,接着向 post_task_for_gui_thread()的调用者返回future⑩。接下来,有关代码向 GUI 线程投递消息,假如这些代码需判断任务是否完成,以获取结果进而采取后续操作,那么只要等待future就绪即可;否则,任务的结果不会派上用场,关联的future可被丢弃。
有些任务无法以简单地函数调用表达出来。还有一些任务的执行结果可能来自多个部分的代码。这时候需要采用第三种方法:借助**std::promise**显式异步求值。
4.2.3 创建 std::promise
假设有个应用需要处理大量网络连接,一开始可能倾向于运用多个独立线程。一对一地处理各个连接,原因是这能简化网络通信的构思,程序编写也相对容易。 如果连接数量较少(因而线程数量也少),此方式行之有效 ; 随着连接数量攀升,它就力不从心了。过多线程导致消耗巨量系统资源,一旦线程数量超出硬件所支持的并发任务数量,还可能引起繁重的上下文切换,影响性能。极端情况下,在网络连接超出负 荷之前,操作系统就可能已经先耗尽别的资源,无法再运行新线程。故此,若应用要处理大量网络连接,通常交由少量线程负责处理(可能只有一个),每个线程同时处理多个连接。
std::promise<T>给出一种异步求值的方法(类型为 T),某个**std::future<T>**对象与结果关联。能延后读出需要求取的值。
配对的std::promise<T>和std::future<T>可以实现:等待数据的线程在**future**上阻塞,而提供数据的线程利用相配的**promise**设定关联的值,使**future**准备就绪。
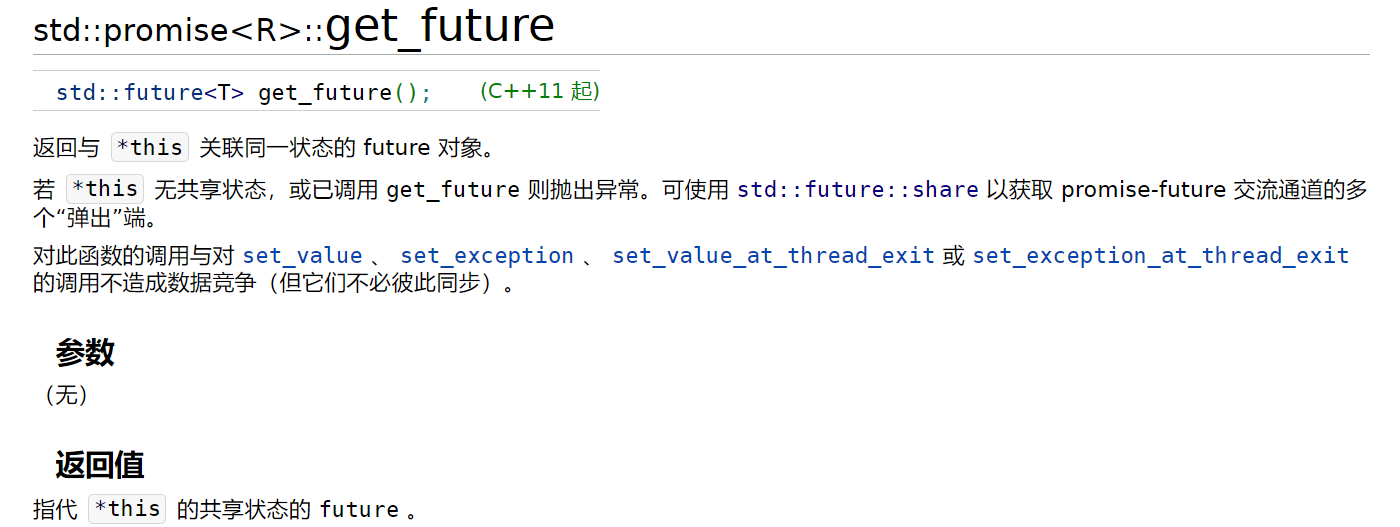
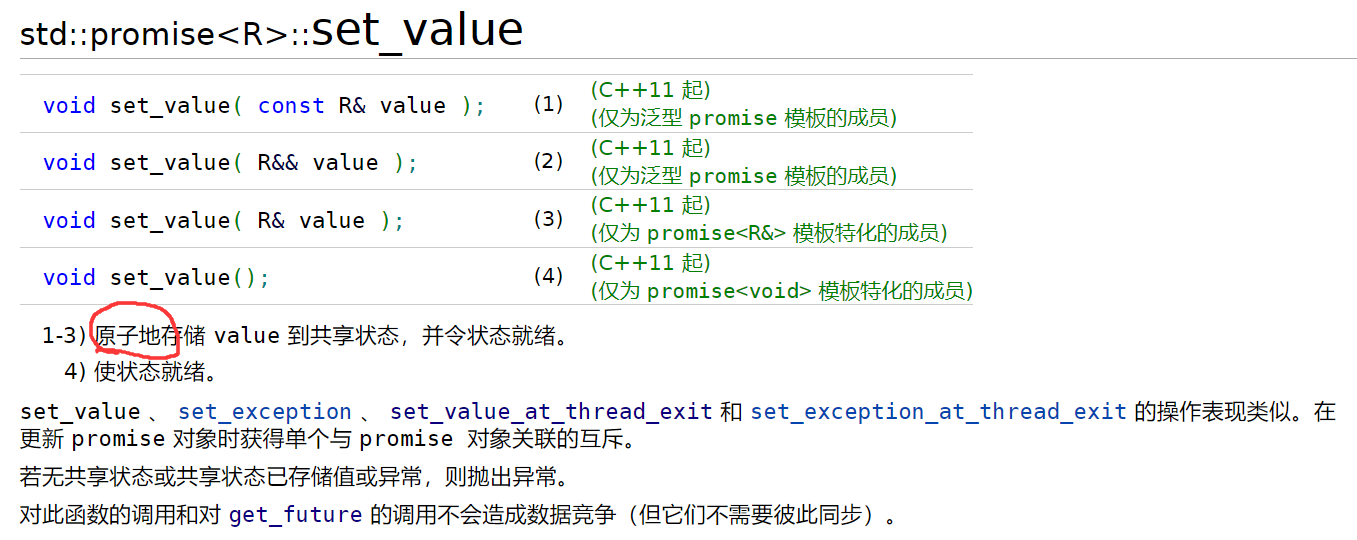
若需从给定的std:promise实例获取关联的std::future对象,调用前者的成员函数**get_future()**即可。**promise**的值通过成员函数**set_value()**设置,只要设置好,future即准备就绪,凭借它就能获取该值。
如果std::promise被销毁时仍未设置值,保存的数据则由异常代替。
4.2.5 多个线程一起等待
只要同步操作是一对一地在线程传递数据,std::future都能处理。然而对于某个std::future实例,如果其成员函数由不同线程调用,却不会自动同步。
这是std::future特性:模拟了对异步结果的独占行为,**get()**仅能被有效调用一次。只有一个线程能获取目标值,原因是第一次调用**get()**会进行移动操作,之后该值不复存在: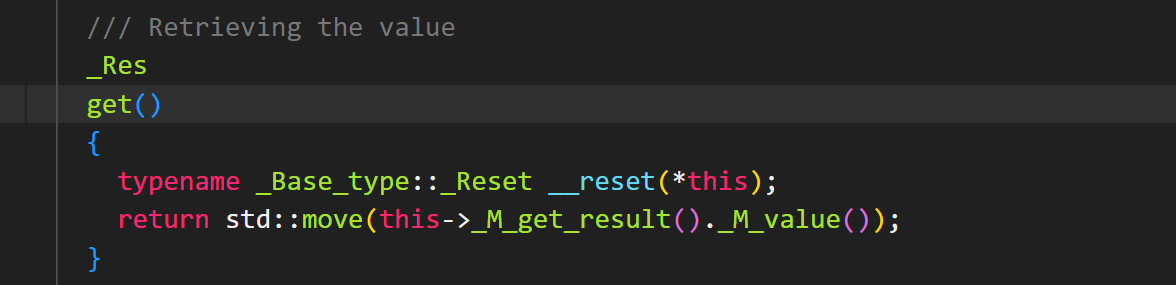
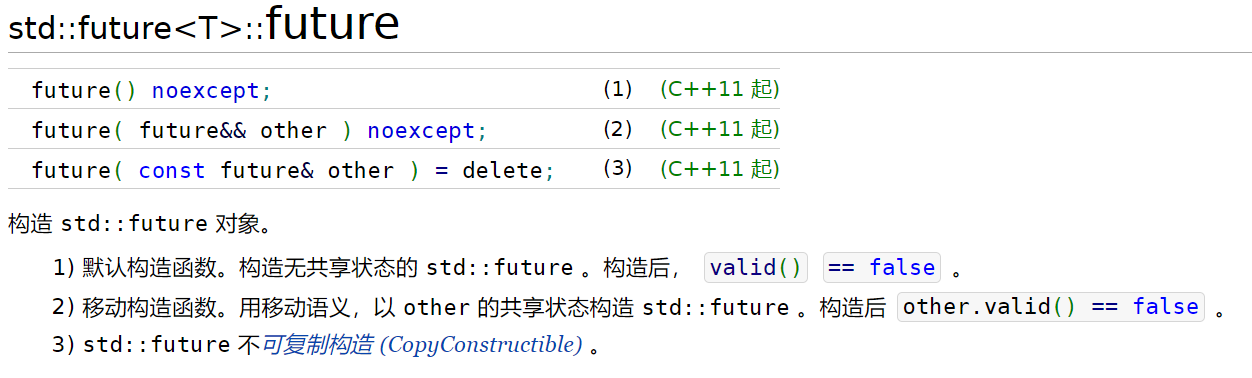
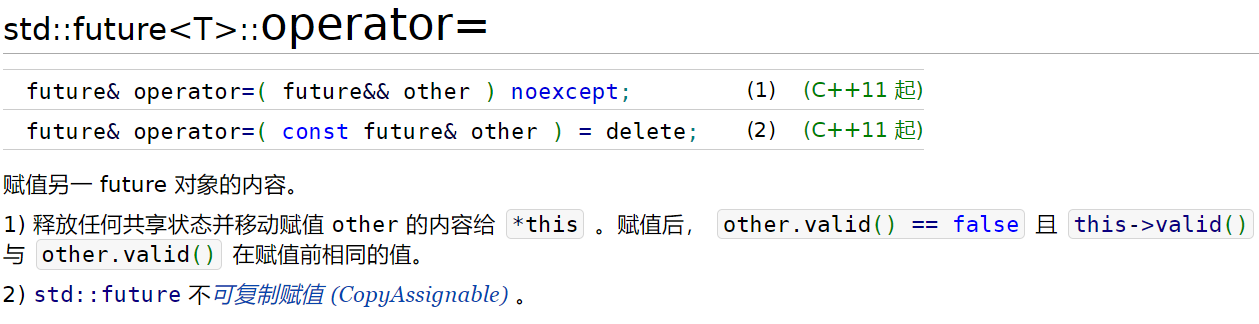
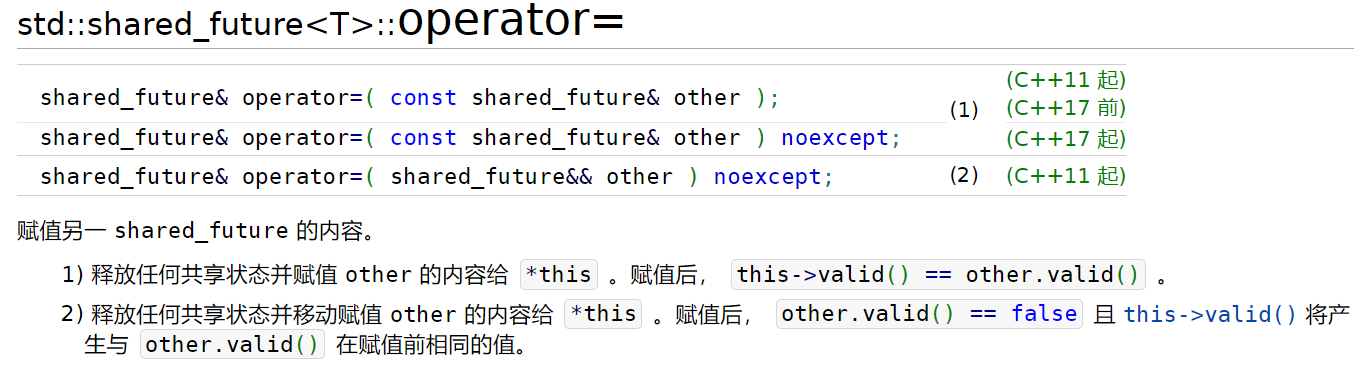
std::shared_future可以让多个线程等待同一个目标事件。std::future仅能移动构造和移动赋值,所以归属权可以在多个实例之间转移,但是在相同时刻只有唯一一个**future**实例指向特定的异步结果: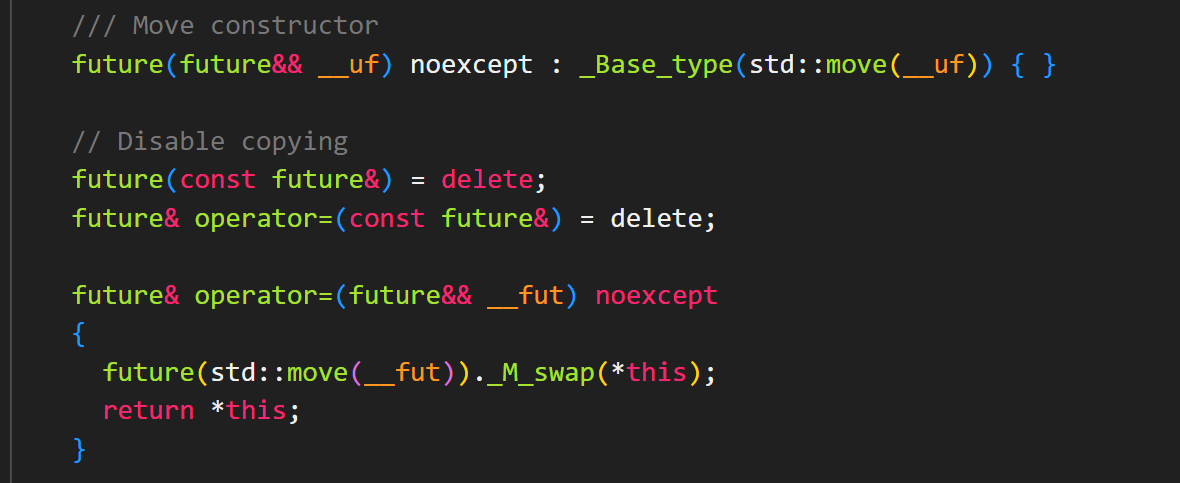
std::shared_future的实例则可以复制出副本,因此可以持有该类的多个对象,全部指向同一异步任务的状态数据。
即使改用**std::shared_future**,同一个对象的成员函数依然没有同步。如果从多个线程访问同一个对象,就必须采用锁保护。
首选方式是:向每个线程传递**std::shared_future**对象的副本,它们为各线程独自所有,并被视作局部变量。这样这些副本就作为各线程的内部数据,由标准库正确同步。 若多个线程共享异步状态 ,只要它们通过自有的std::shared_future对象读取状态数据,则该访问行为是安全的 :
Version 1: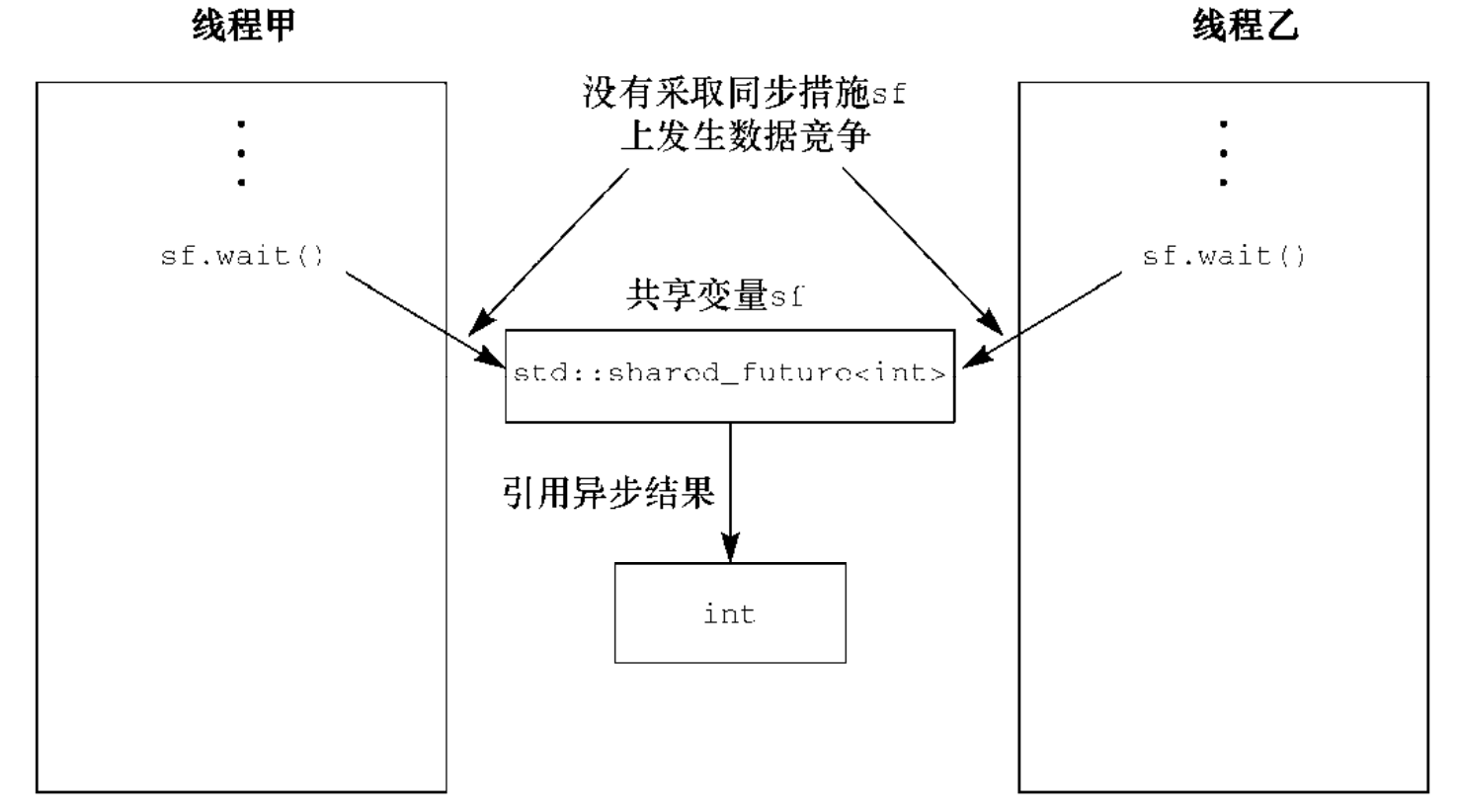
Version 2: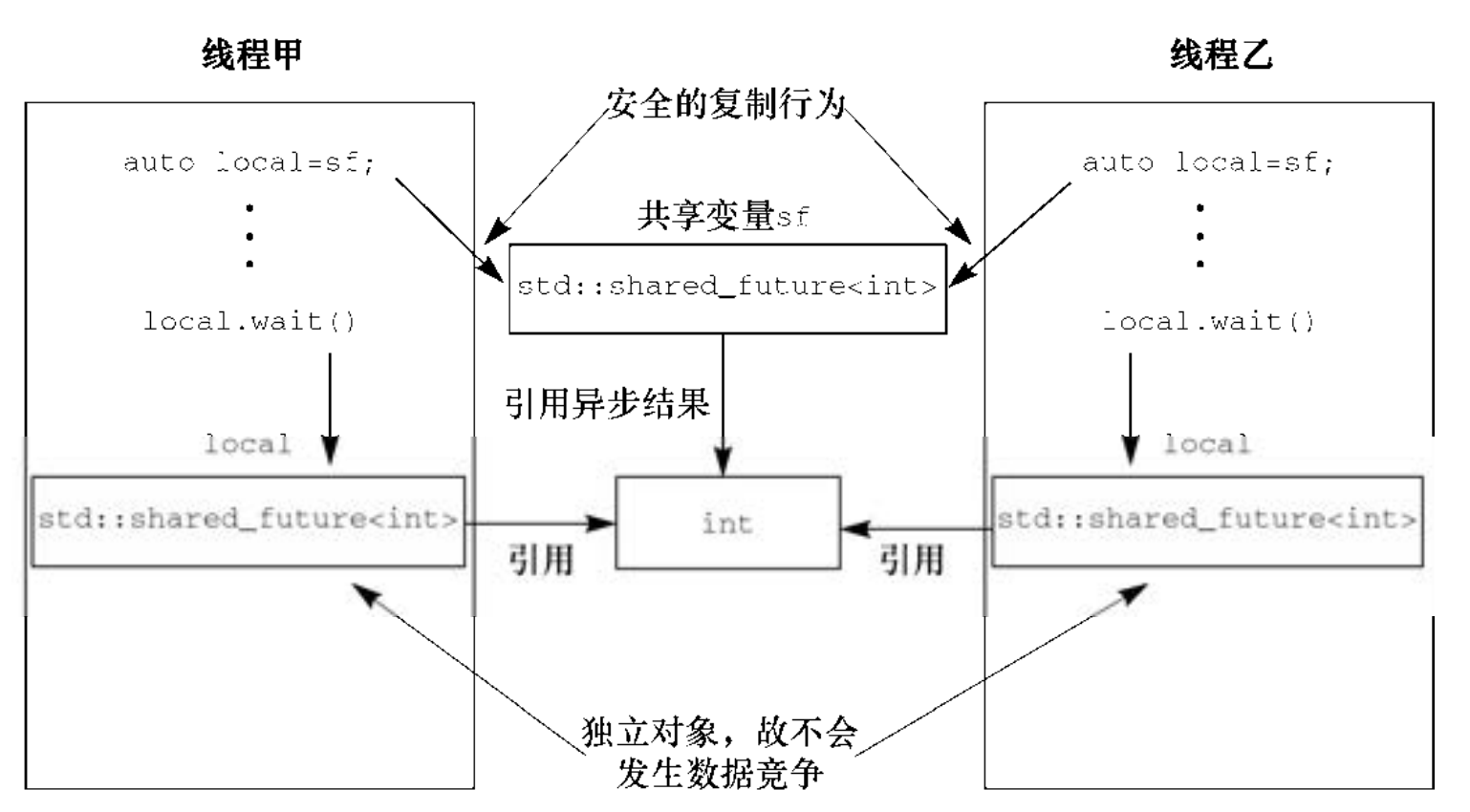
future和promise都具备成员函数valid(),用于判断异步状态是否有效。
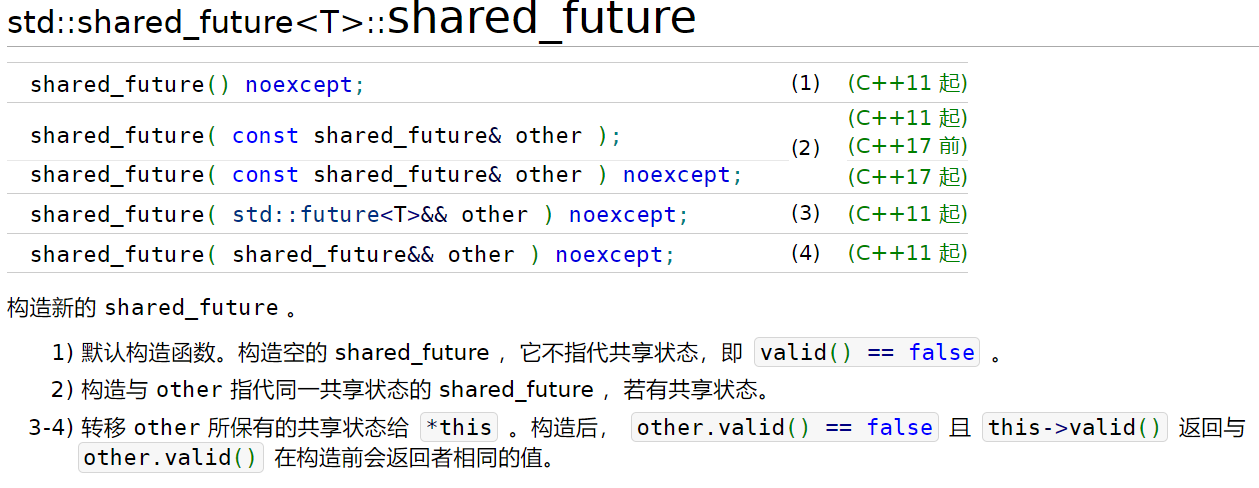
**std::shared_future**的实例依据**std::future**的实例构造得来,前者所指向的异步状态由后者决定。因为**std::future**对象独占异步状态,其归属权不被其他任何对象所共有。所以若要按默认方式构造**std::shared_future**对象,则须用**std::move**向其默认构造函数传递归属权,这使**std::futrue**变成空状态:
std::promise<int> p;std::future<int> f(p.get_future());assert(f.valid()); //future 对象 f 有效std::shared_future<int> sf(std::move(f)); //对象 f 不再有效assert(!f.valid());assert(sf.valid()); //对象 sf 开始生效
而且std::future拥有成员函数share(),直接创建新的std::shared_future对象,并向它转移归属权:
std::promise<std::map<int,int>::iterator> p;auto sf = p.get_future().share();
future、async、promise、packaged_task详解
std::future
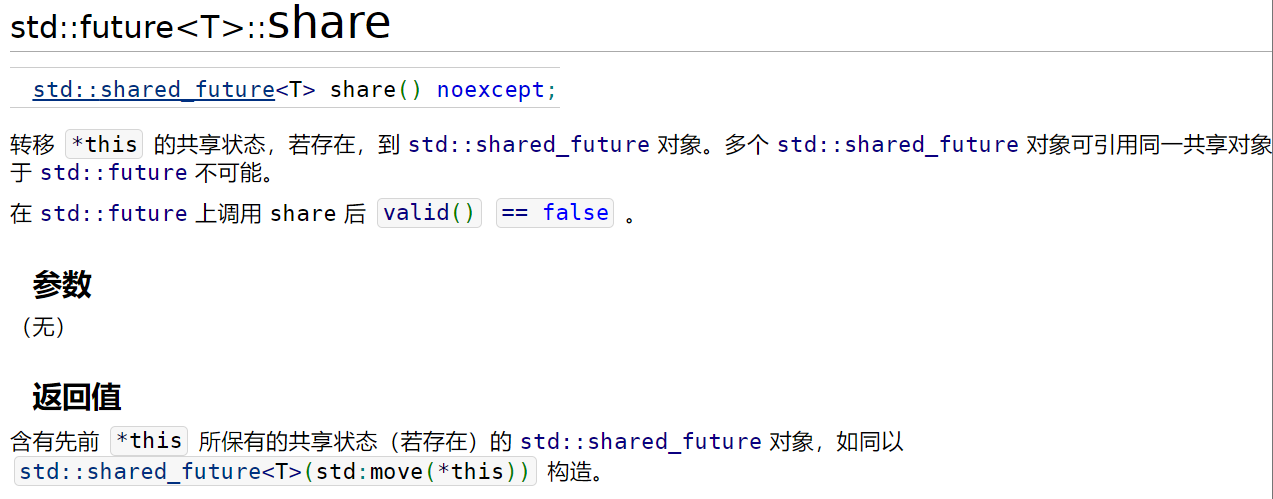

HINT:鼓励在调用前监测valid()为false的情况。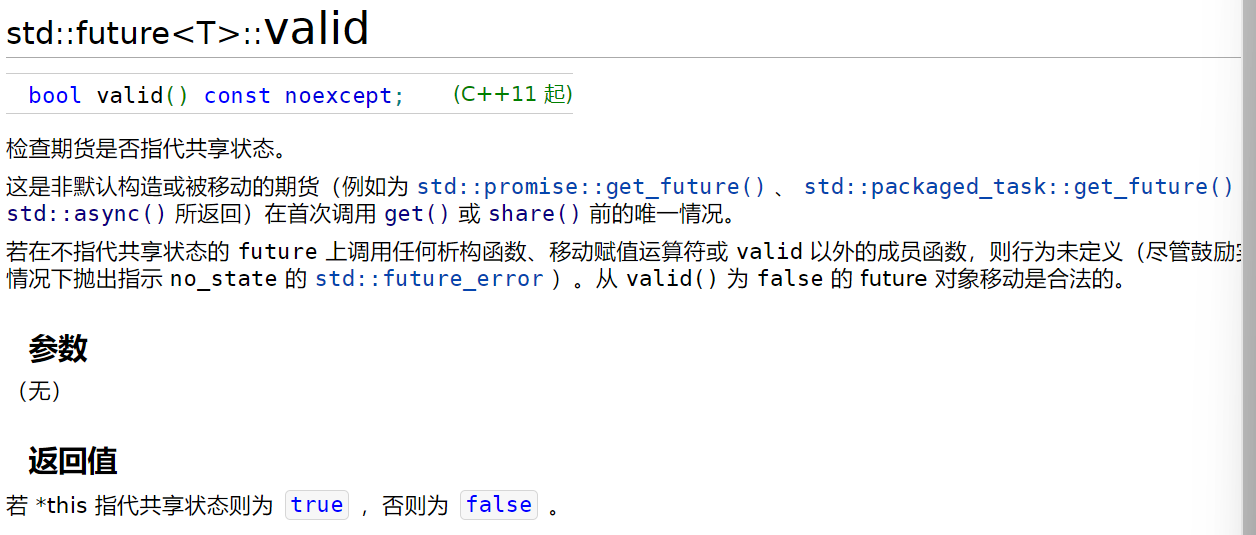
其实这里的意思应该是关联,关联到一个实例的意思。
#include<iostream>#include<future>#include<thread>using namespace std;int main(void){std::promise<void> p{};std::future<void> f = p.get_future();std::cout<<std::boolalpha;std::cout<<f.valid()<<std::endl;p.set_value();std::cout<<f.valid()<<std::endl;f.get();std::cout<<f.valid()<<std::endl;}//resulttruetruefalse
future代码实例:
#include <future>#include <iostream>#include <thread>using namespace std;int main(void) {std::packaged_task<int()> task([]() { return 7; }); //包装函数std::future<int> f1 = task.get_future(); //获取futurestd::thread(std::move(task)).detach(); //在线程上运行//来自 async() 的 futurestd::future<int> f2 = std::async(std::launch::async, []() { return 8; });//来自 promise() 的 futurestd::promise<int> p{};std::future<int> f3 = p.get_future();std::thread([&]() { p.set_value_at_thread_exit(9); }).detach();std::cout<<"Waiting..."<<std::flush;f1.wait();f2.wait();f3.wait();std::cout << "Done!\nResults are: "<< f1.get() << ' ' << f2.get() << ' ' << f3.get() << '\n';}
std::shared_future
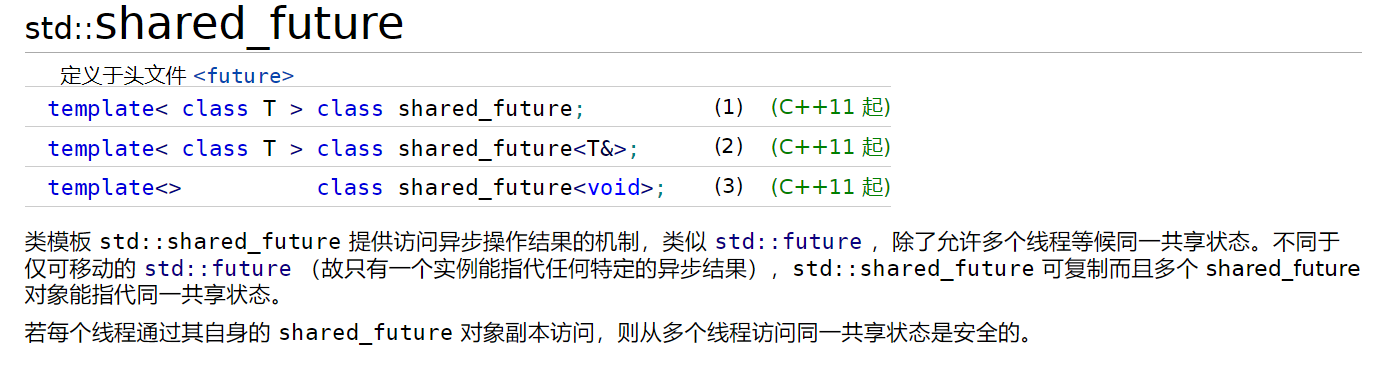
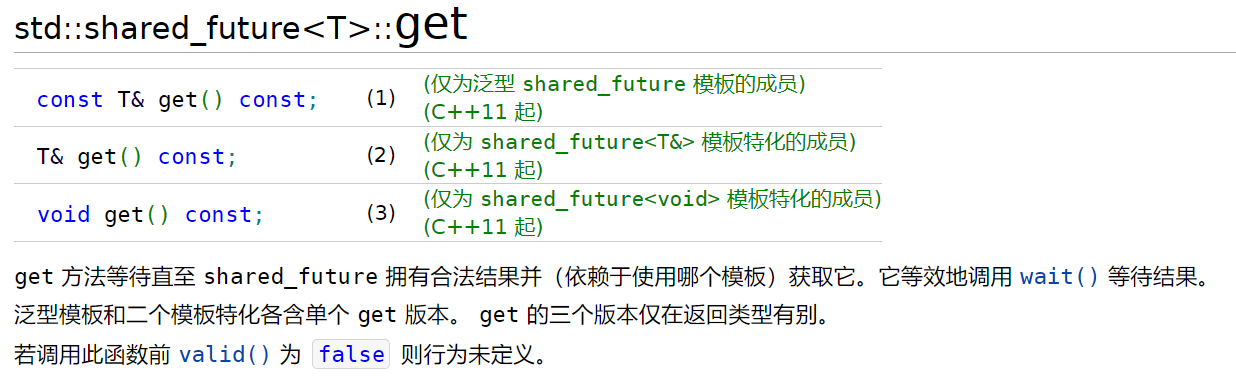
HINT:鼓励在get()之前采用valid()检查。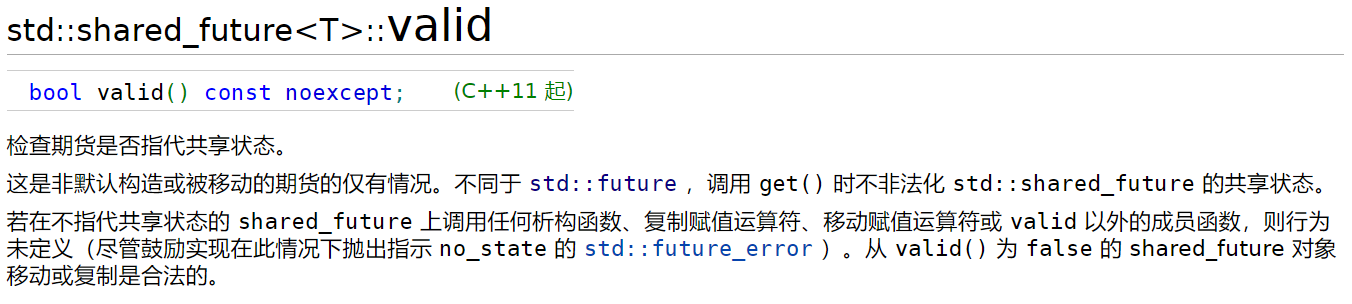
std::shared_future不同于std::future,它不会在调用get()后valid()结果变为false。
#include <future>#include <iostream>int main() {std::promise<void> p;std::shared_future<void> f = p.get_future();std::cout << std::boolalpha;std::cout << f.valid() << '\n';p.set_value();std::cout << f.valid() << '\n';f.get();std::cout << f.valid() << '\n';}//reuslttruetruetrue
在同一个std::shared_future实例上从多个线程调用wait()不安全,应该令每个等待于同一个共享状态上的线程拥有一个**std::shared_future**副本。
std::shared_future示例:
#include <chrono>#include <future>#include <iostream>#include <thread>int main(void) {std::promise<void> ready_promise, t1_ready_promise, t2_ready_promise;std::shared_future<void> ready_future(ready_promise.get_future());std::chrono::time_point<std::chrono::high_resolution_clock> start;auto fun1 = [&, ready_future]() -> std::chrono::duration<double, std::milli> {t1_ready_promise.set_value();ready_future.wait(); // 等待来自 main() 的信号return std::chrono::high_resolution_clock::now() - start;};auto fun2 = [&, ready_future]() -> std::chrono::duration<double, std::milli> {t2_ready_promise.set_value();ready_future.wait(); // 等待来自 main() 的信号return std::chrono::high_resolution_clock::now() - start;};auto result1 = std::async(std::launch::async, fun1);auto result2 = std::async(std::launch::async, fun2);//等待线程变为就绪t1_ready_promise.get_future().wait();t2_ready_promise.get_future().wait();//线程已就绪,开始时钟start = std::chrono::high_resolution_clock::now();ready_promise.set_value();std::cout << "Thread 1 received the signal "<< result1.get().count() << " ms after start\n"<< "Thread 2 received the signal "<< result2.get().count() << " ms after start\n";}
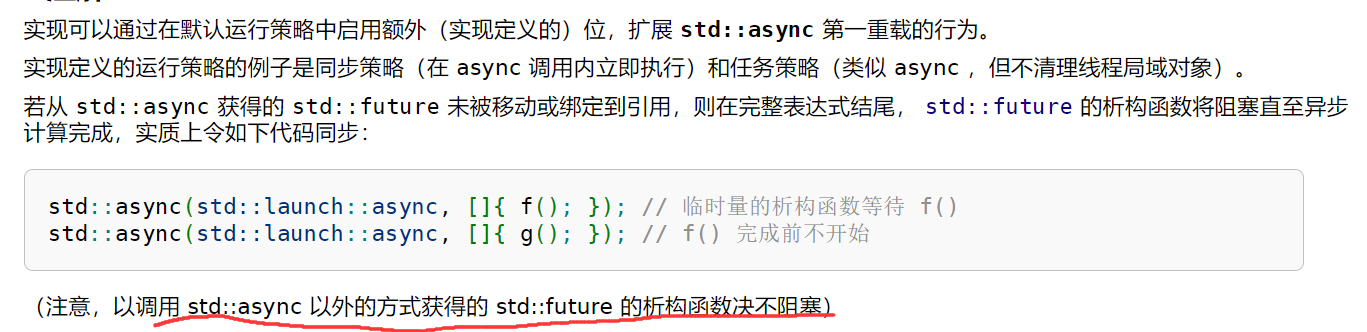
std::async

函数模板async异步地运行函数f()(潜在地在可能是线程池一部分的分离线程中),并返回最终将保有该函数调用结果的std::future。
- 表现如同以
policy为std::launch::async | std::launch::deferred调用(2)。即f()可能执行于某一线程,也可能在查询产生的**std::future**的值时同步运行。 - 按照特定的执行策略
policy,以参数args调用函数f():- 若设置 async 标志(即 (policy & std::launch::async) != 0 ),则
**async**在新的执行线程(初始化所有线程局域对象后)执行可调用对象**f()**,如同产出std::thread(std::forward<F>(f),std::forward<Args>(args)...),除了若f()返回值或抛出异常,则于可通过async返回给调用方的std::future访问的共享状态存储结果。 - 若设置
deferred标志(即 (policy & std::launch::deferred) != 0 ),则async以同std::thread构造函数的方式转换f()与args...,但不产出新的执行线程。而是进行惰性求值:在async所返回的std::future上首次调用非定时等待函数,将导致在当前线程(不必是最初调用std::async的线程)中,以args...(作为右值传递)的副本调用f()(亦作为右值)的副本。将结果或异常置于关联到该future的共享状态,然后才令它就绪。对同一**std::future**的所有后续访问都会立即返回结果。 - 若
policy中设置了std::launch::async和std::launch::deferred两个标志,则进行异步执行还是惰性求值取决于实现。 - 若
policy中未设置std::launch::async或std::launch::deferred或任何实现定义策略标志,则行为未定义。
- 若设置 async 标志(即 (policy & std::launch::async) != 0 ),则
#include <algorithm>#include <future>#include <iostream>#include <mutex>#include <numeric>#include <string>#include <vector>using namespace std;std::mutex m;struct X {void foo(int i, const std::string& str) {std::lock_guard<std::mutex> lk(m);std::cout << str << ' ' << i << '\n';}void bar(const std::string& str) {std::lock_guard<std::mutex> lk(m);std::cout << str << '\n';}int operator()(int i) {std::lock_guard<std::mutex> lk(m);std::cout << i << '\n';return i + 10;}};template <typename RandomIt>int parallel_sum(RandomIt beg, RandomIt end) {auto len = end - beg;if (len < 1000)return std::accumulate(beg, end, 0);RandomIt mid = beg + len / 2;auto handle = std::async(std::launch::async,parallel_sum<RandomIt>, mid, end);int sum = parallel_sum(beg, mid);return sum + handle.get();}int main(void) {std::vector<int> v(1000, 1);std::cout << "The sum is " << parallel_sum(v.begin(), v.end()) << '\n';X x;// 以默认策略调用 x.foo(42, "Hello") :// 可能同时打印 "Hello 42" 或延迟执行auto a1 = std::async(&X::foo, &x, 42, "Hello");// 以 deferred 策略调用 x.bar("world!")// 调用 a2.get() 或 a2.wait() 时打印 "world!"auto a2 = std::async(std::launch::deferred, &X::bar, x, "world!");// 以 async 策略调用 X()(43) :// 同时打印 "43"auto a3 = std::async(std::launch::async, X(), 43);a2.wait();std::cout << a3.get() << '\n';}
std::packaged_task
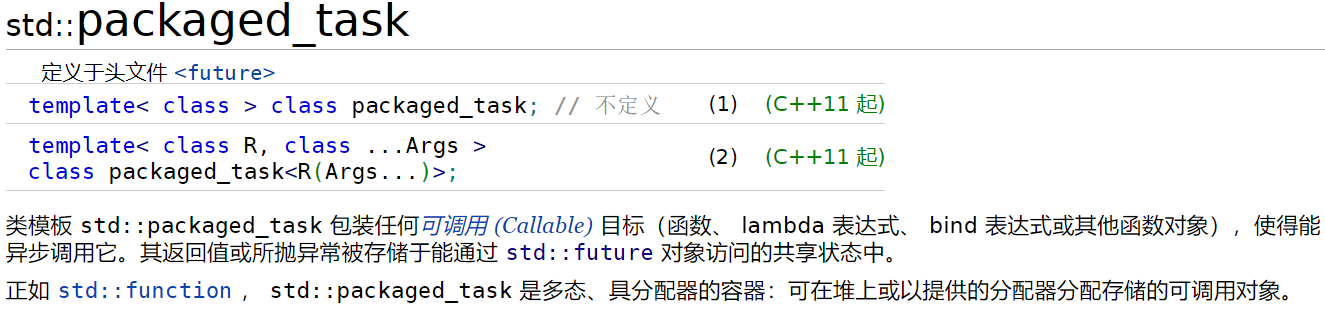
HINT:**std::packaged_task()**只能被移动。
#include <iostream>#include <cmath>#include <thread>#include <future>int main(){std::packaged_task<int(int,int)> task([](int a, int b) {return std::pow(a, b);});std::future<int> result = task.get_future();task(2, 9);std::cout << "2^9 = " << result.get() << '\n';task.reset();result = task.get_future();std::thread task_td(std::move(task), 2, 10);task_td.join();std::cout << "2^10 = " << result.get() << '\n';}
std::packaged_task示例:
#include <cmath>#include <functional>#include <future>#include <iostream>#include <thread>using namespace std;int f(int x, int y) { return std::pow(x, y); }void task_lambda() {std::packaged_task<int(int, int)> task([](int a, int b) {return std::pow(a, b);});std::future<int> result = task.get_future();task(2, 9);std::cout << "task_lambda:\t" << result.get() << '\n';}void task_bind() {std::packaged_task<int()> task(std::bind(f, 2, 11));std::future<int> result = task.get_future();task();std::cout << "task_bind:\t" << result.get() << '\n';}void task_thread() {std::packaged_task<int(int, int)> task(f);std::future<int> result = task.get_future();std::thread task_td(std::move(task), 2, 10);task_td.join();std::cout << "task_thread:\t" << result.get() << '\n';}int main() {task_lambda();task_bind();task_thread();}
std::promise
std::promise的作用就是提供一个不同线程之间的数据同步机制,它可以存储一个某种类型的值,并将其传递给对应的future, 即使这个**future**不在同一个线程中也可以安全的访问到这个值。
HINT:**std::promise**不可复制。
#include <algorithm>#include <cctype>#include <future>#include <iostream>#include <iterator>#include <sstream>#include <thread>#include <vector>int main() {std::istringstream iss_numbers{"3 4 1 42 23 -23 93 2 -289 93"};std::istringstream iss_letters{" a 23 b,e a2 k k?a;si,ksa c"};std::vector<int> numbers;std::vector<char> letters;std::promise<void> numbers_promise, letters_promise;auto numbers_ready = numbers_promise.get_future();auto letter_ready = letters_promise.get_future();std::thread value_reader([&] {// I/O 操作。std::copy(std::istream_iterator<int>{iss_numbers},std::istream_iterator<int>{},std::back_inserter(numbers));// 为数字提醒。numbers_promise.set_value();std::copy_if(std::istream_iterator<char>{iss_letters},std::istream_iterator<char>{},std::back_inserter(letters),::isalpha);// 为字母提醒。letters_promise.set_value();});numbers_ready.wait();std::sort(numbers.begin(), numbers.end());if (letter_ready.wait_for(std::chrono::seconds(1)) ==std::future_status::timeout) {// 在获得字母的同时输出数for (int num : numbers)std::cout << num << ' ';numbers.clear(); // Numbers were already printed.}letter_ready.wait();std::sort(letters.begin(), letters.end());// 若已打印数,则不做任何事。for (int num : numbers)std::cout << num << ' ';std::cout << '\n';for (char let : letters)std::cout << let << ' ';std::cout << '\n';value_reader.join();return 0;}
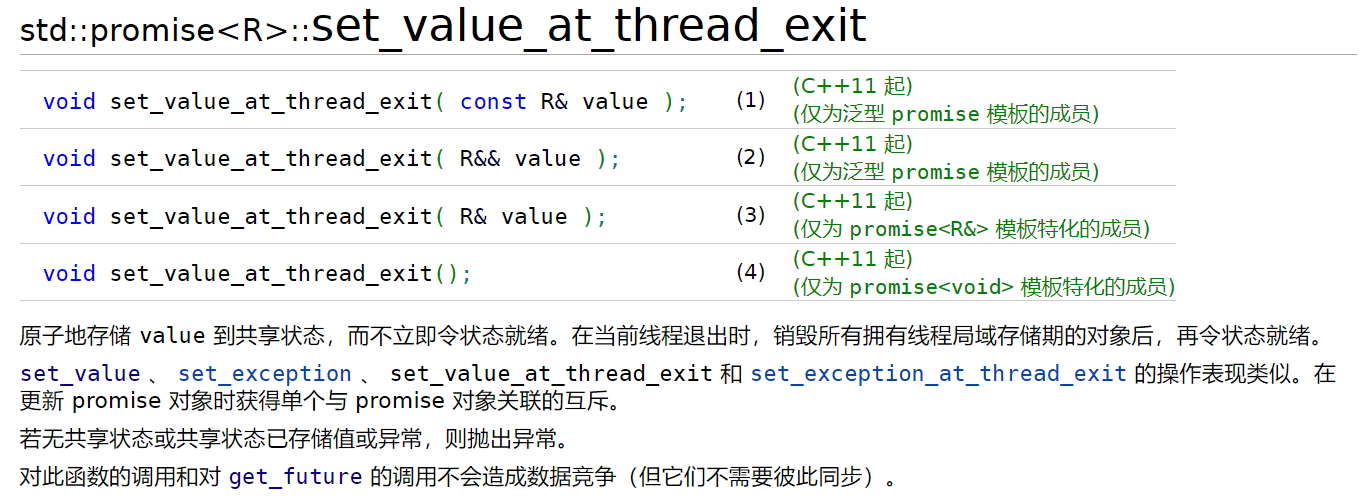
#include <iostream>#include <future>#include <thread>int main(){using namespace std::chrono_literals;std::promise<int> p;std::future<int> f = p.get_future();std::thread([&p] {std::this_thread::sleep_for(1s);p.set_value_at_thread_exit(9);}).detach();std::cout << "Waiting..." << std::flush;f.wait();std::cout << "Done!\nResult is: " << f.get() << '\n';}
std::promise实例:
#include <vector>#include <thread>#include <future>#include <numeric>#include <iostream>#include <chrono>void accumulate(std::vector<int>::iterator first,std::vector<int>::iterator last,std::promise<int> accumulate_promise){int sum = std::accumulate(first, last, 0);accumulate_promise.set_value(sum); // 提醒 future}void do_work(std::promise<void> barrier){std::this_thread::sleep_for(std::chrono::seconds(1));barrier.set_value();}int main(){// 演示用 promise<int> 在线程间传递结果。std::vector<int> numbers = { 1, 2, 3, 4, 5, 6 };std::promise<int> accumulate_promise;std::future<int> accumulate_future = accumulate_promise.get_future();std::thread work_thread(accumulate, numbers.begin(), numbers.end(),std::move(accumulate_promise));// future::get() 将等待直至该 future 拥有合法结果并取得它// 无需在 get() 前调用 wait()//accumulate_future.wait(); // 等待结果std::cout << "result=" << accumulate_future.get() << '\n';work_thread.join(); // wait for thread completion}//结果result = 21
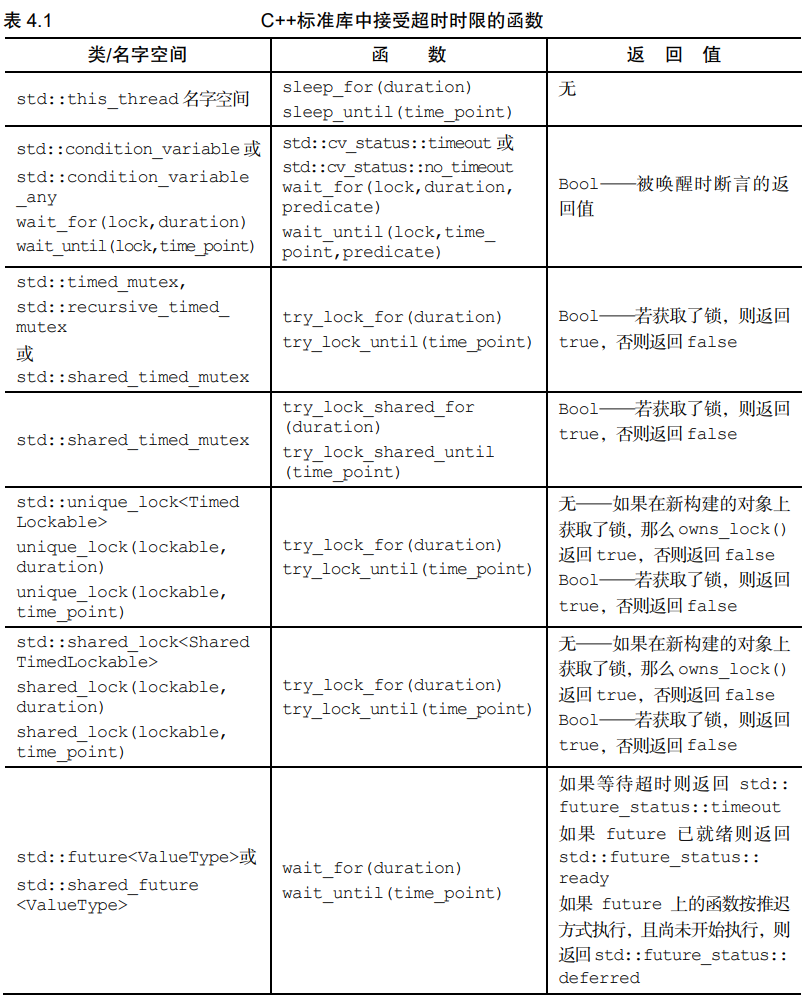
4.3 限时等待
有两种超时机制可选:
- 延迟超时:线程根据指定的时长继续等待:以
_for为后缀; - 绝对超时:在某特定时间点来临之前,线程一直等待:以
_until为后缀
4.3.1 时钟类
C++每种时钟都是一个类,提供 4 项关键信息:
- 当前时刻;
- 时间值的类型(从该时钟取得的时间以它为表示形式);
- 该时钟的计时单元的长度;
- 计时速率是否恒定,即能否将该时钟视为恒稳时钟。
若要获取某时钟类的当前时刻,调用其静态成员函数now()即可。 每个时钟类都具有名为**time_ point**的成员类型(member type),它是该时钟类自有的时间点类。据此,some_clock:: now()的返回值的类型就是some_clock::time_point。
时钟类的计时单元属于period的成员类型,表示为秒的分数形式: 若时钟每秒计数 25 次,它的计时单元即为std::ratio<1,25>;若时钟每隔 2.5 秒计数 1 次,则其计时单元为std::ratio<5,2>。
时钟类具有静态数据成员is_steady,该值在恒稳时钟内为true,否则为 false。 通常,std::chrono::system_clock类不是恒稳时钟,因为它可调整。即便这种调整自动发生,作用是消除本地系统时钟的偏差,依然可能导致:调用两次now(),后来返回的时间值甚至早于前一个。
4.3.2 时长类
看书,不记笔记了….
4.3.4 接受超时时限的函数
4.4 运用同步操作简化代码
从底层运作机制抽身,专注于需要进行同步的操作。一种途径是:在兵法中使用函数式编程的风格,线程间不会直接共享数据,而由各任务预先备妥自己所需的数据,并借助**future**将结果发送到其他有需要的线程。
4.4.1 利用 future 进行函数式编程
函数式编程:函数调用的结果完全取决于参数,而不依赖于任何外部状态。
只要共享数据没有改动,就不会引发竞态条件,因而无需使用互斥。使用future可以更好的实现:future对象可在线程间传递,所以一个计算任务可以依赖于另一个任务的结果,而不必显式访问共享数据。
并发执行的快速排序:
// 运用 future 实现并行快速排序#include <algorithm>#include <iostream>#include <list>#include <future>using namespace std;template <typename T>std::list<T> parallel_quick_sort(std::list<T> input) {if (input.empty())return input;std::list<T> result{};//剪贴函数,将另外一个 list 中的元素剪贴到本 list 当中result.splice(result.begin(), input, input.begin());T const& pivot = *result.begin();// partition:// Move elements for which a predicate is true to the beginning of a sequence.// 这里把链表按照基准值区分开auto divide_point = std::partition(input.begin(), input.end(),[&](T const& t) { return t < pivot; });std::list<T> lower_part{};lower_part.splice(lower_part.end(), input, input.begin(), divide_point);std::future<std::list<T>> new_lower(std::async(¶llel_quick_sort<T>, std::move(lower_part)));auto new_higher(parallel_quick_sort(std::move(input)));result.splice(result.end(), new_higher);result.splice(result.begin(), new_lower.get());return result;}int main(void){std::list<int> lst{9, 12, 1, 6, 2, 16};auto tmp = parallel_quick_sort(lst);for (auto i : tmp)cout << i << ' ';std::cout << std::endl;return 0;}

若有收获,就点个赞吧
0 人点赞
