ConcurrentHashMap提供了一个在并发下比较有用的方法putIfAbsent(K key,V value),如果传入key对应的value已经存在,就返回存在的value,不进行替换。如果不存在,就添加key和value,返回null。在代码层面它的作用类似于:
synchronized(map) {if(!map.containsKey(key)) {return map.put(key,value);}else {return map.get(key);}}
JDK1.7
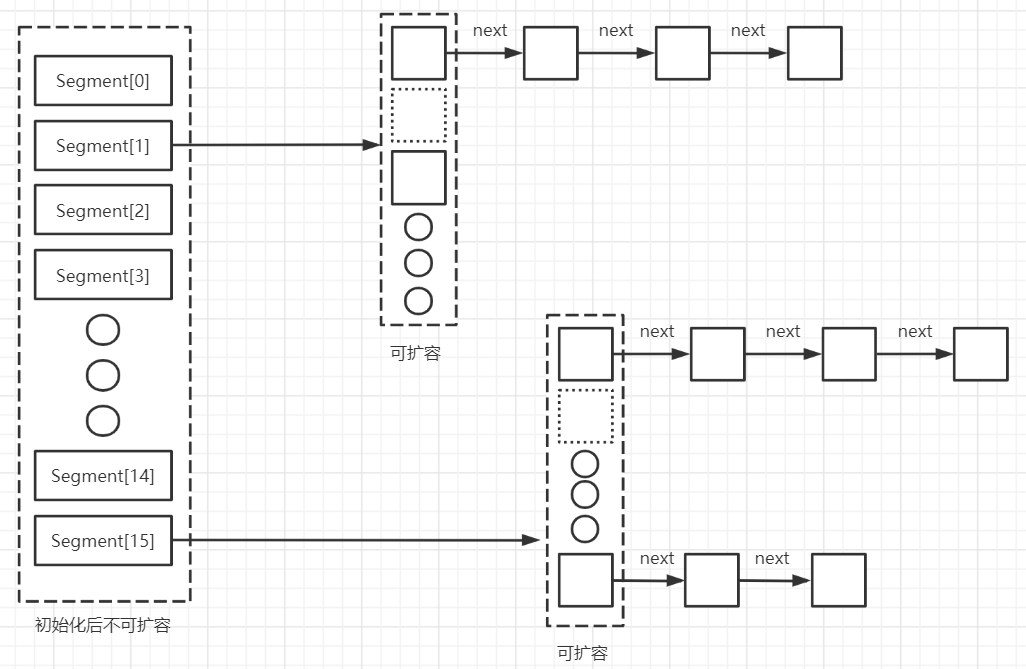
ConcurrentHashMap是由Segment数组结构和HashEntry数组结构组成。Segment是一种可重入锁,即:ReentrantLock,在ConcurrentHashMap里扮演锁的角色; HashEntry则用于存储键值对数据。一个ConcurrentHashMap里包含一个Segment数组。Segment的结构和HashMap类似,是一种数组和链表结构。一个Segment里包含一个HashEntry数组,每个HashEntry是一个链表结构的元素,每个Segment守护着一个HashEntry数组里的元素,当对HashEntry数组的数据进行修改时,必须首先获得与它对应的Segment锁。
并发度(级别)
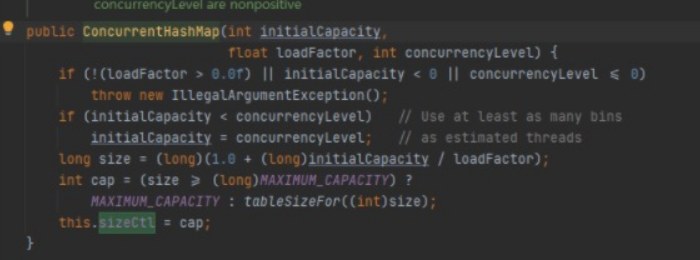
ConcurrentHashMap初始化方法是通过initialCapacity、loadFactor和concurrencyLevel(是用户估计的并发级别,就是说你觉得最多有多少线程共同修改这个map,根据这个来确定Segment数组的大小concurrencyLevel默认是DEFAULT_CONCURRENCY_LEVEL=16)等几个参数来初始化segment数组、段偏移量segmentShift、段掩码segmentMask和每个segment里的HashEntry数组来实现的。
并发级别可以理解为程序运行时能够同时更新ConcurrentHashMap且不产生锁竞争的最大线程数,实际上就是ConcurrentHashMap中的分段锁个数,即:Segment[]的数组长度。
ConcurrentHashMap默认的并发度为16,但用户也可以在构造函数中设置并发度。当用户设置并发度时,ConcurrentHashMap会使用大于等于该值的最小2次幂指数作为实际并发度,假如用户设置并发度为17,实际并发度则为32。
如果并发度设置的过小,会带来严重的锁竞争问题;如果并发度设置的过大,原本位于同一个Segment内的访问会扩散到不同的Segment中,CPU cache命中率会下降,从而引起程序性能下降。
segments数组的长度ssize是通过concurrencyLevel计算得出的。为了能通过按位与的散列算法来定位segments数组的索引,必须保证segments数组的长度是2的N次方,所以必须计算出一个大于或等于concurrencyLevel的最小的2的N次方值来作为segments数组的长度。假如concurrencyLevel等于14、15或16,ssize都会等于16,即容器里锁的个数也是16。
初始化segmentShift和segmentMask
这两个全局变量需要在定位segment时的散列算法里使用,sshift等于ssize从1向左移位的次数,在默认情况下concurrencyLevel等于16,1需要向左移位移动4次,所以sshift等于4。segmentShift用于定位参与散列运算的位数,segmentShift等于32减sshift,所以等于28,这里之所以用32是因为ConcurrentHashMap里的hash()方法输出的最大数是32位的。segmentMask是散列运算的掩码,等于ssize减1,即15,掩码的二进制各个位的值都是1。因为ssize的最大长度是65536,所以segmentShift最大值是16,segmentMask最大值是65535,对应的二进制是16位,每个位都是1。
输入参数initialCapacity是ConcurrentHashMap的初始化容量,loadfactor是每个segment的负载因子,在构造方法里需要通过这两个参数来初始化数组中的每个segment。
ConcurrentHashMap完全允许多个读操作并发进行,读操作并不需要加锁。ConcurrentHashMap实现技术是保证HashEntry几乎是不可变的以及volatile关键字。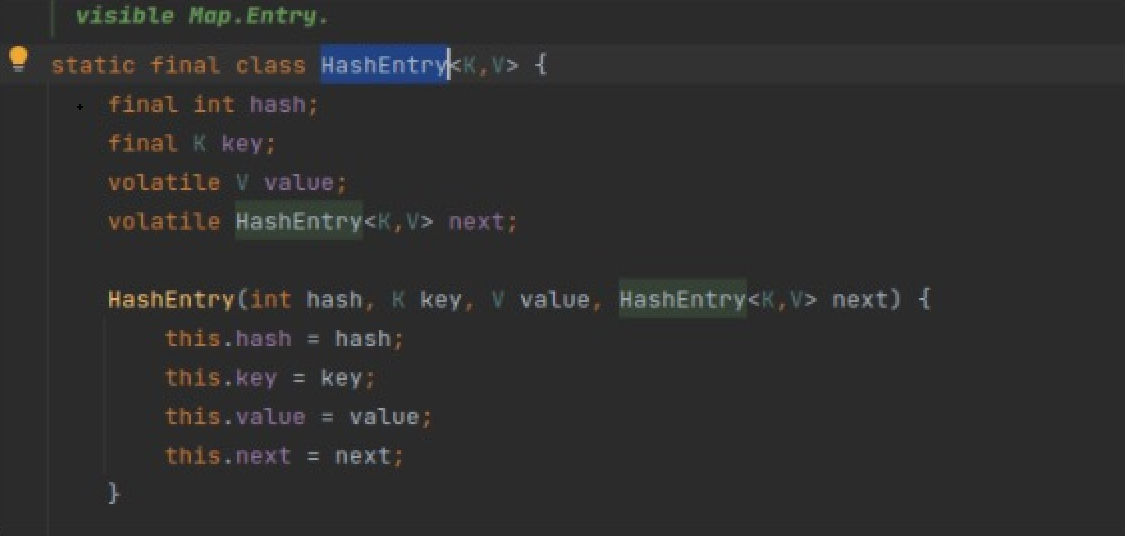
get操作
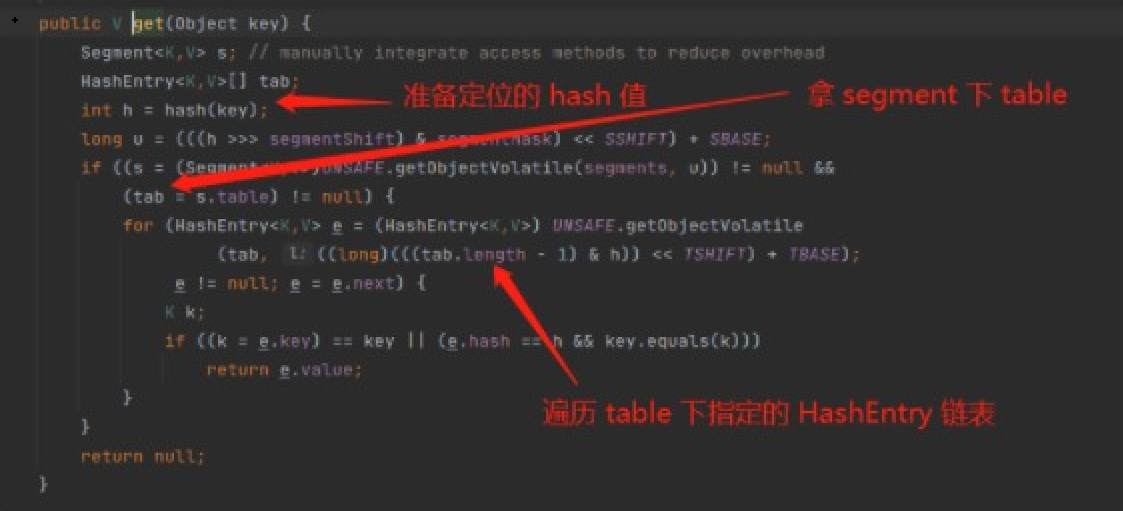
get操作先经过一次再散列,然后使用这个散列值通过散列运算定位到Segment,再通过散列算法定位到table。整个get过程,没有加锁,而是通过volatile保证get总是可以拿到最新值。
put操作
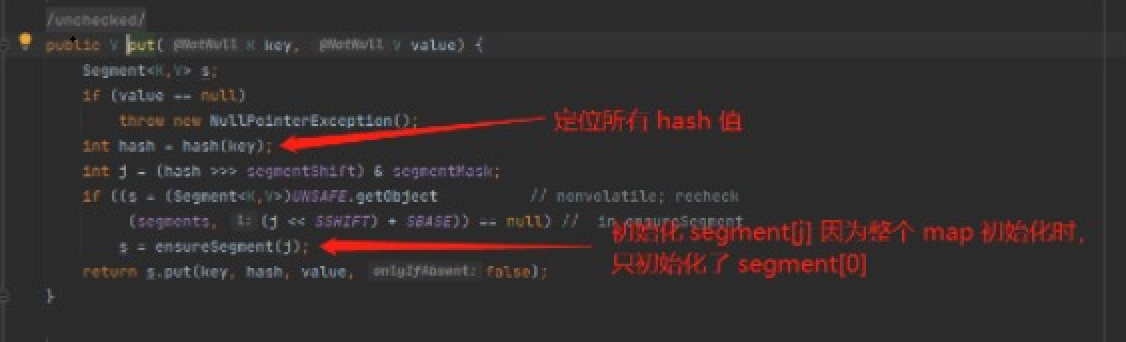
ConcurrentHashMap初始化的时候会初始化第一槽segment[0],对于其他槽,在插入第一个值的时候再进行初始化。
ensureSegment方法考虑了并发情况,多个线程同时进入初始化同一个槽segment[k],但只要有一个成功了就可以了。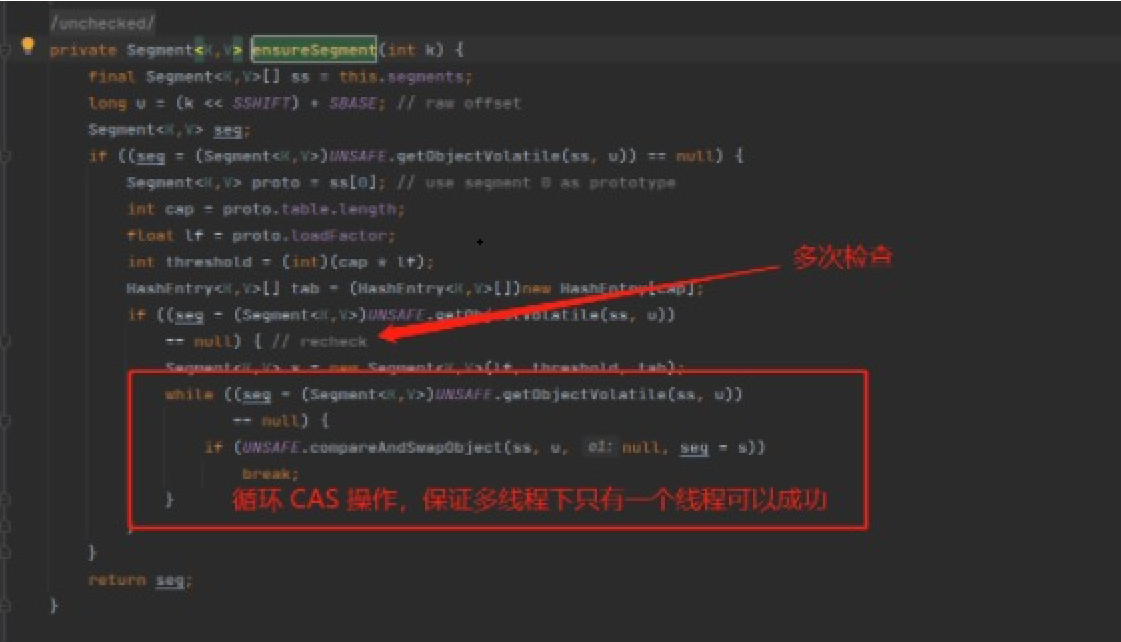
put方法会通过tryLock()方法尝试获得锁,获得了锁,node为null进入try语句块,没有获得锁,调用scanAndLockForPut方法自旋等待获得锁。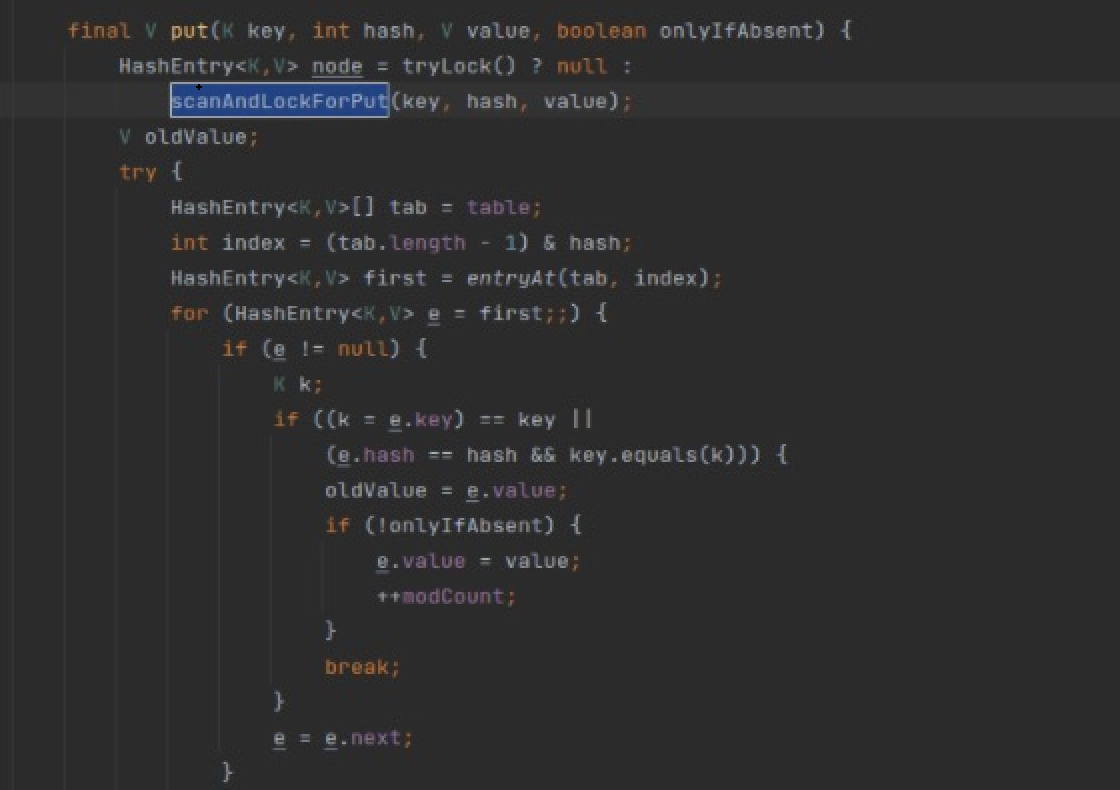
scanAndLockForPut方法里在尝试获得锁的过程中会对对应的hashcode的链表进行遍历,如果遍历完毕仍然找不到与key相同的HashEntry节点,则为后续的put操作提前创建一个HashEntry。当tryLock一定次数后仍无法获得锁,则通过lock申请锁。
在获得锁之后,Segment对链表进行遍历,如果某个HashEntry节点具有相同的key,则更新该HashEntry的value值,否则新建一个HashEntry节点,采用头插法,将它设置为链表的新head节点并将原头节点设为新head的下一个节点。新建过程中如果节点总数,含新建的HashEntry超过threshold,则调用rehash()方法对Segment进行扩容,最后将新建HashEntry写入到数组中。
rehash操作
扩容是新创建数组,然后进行迁移数据,最后再将newTable设置给属性table。
为了避免让所有的节点都进行复制操作:由于扩容是基于2的幂指来操作,假设扩容前某HashEntry对应到Segment中数组的index为i,数组的容量为capacity,那么扩容后该HashEntry对应到新数组中的index只可能为i或者i+capacity,因此很多HashEntry节点在扩容前后index可以保持不变。
如:原来table长度为4,那么元素在table中的分布是这样的: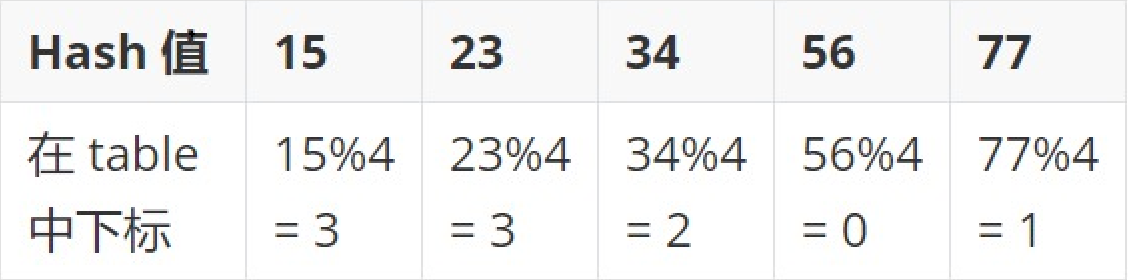
扩容后table长度变为8,那么元素在table中的分布变成:
可以看见hash值为34和56的下标保持不变,而15,23,77的下标都是在原来下标的基础上+4即可,可以快速定位和减少重排次数,该方法没有考虑并发,因为执行该方法之前已经获得了锁。
remove操作
与put方法类似,都是在操作前需要拿到锁,以保证操作的线程安全性。
ConcurrentHashMap的弱一致性
对链表遍历判断是否存在key相同的节点以及获得该节点的value。但由于遍历过程中其他线程可能对链表结构做了调整,因此get和containsKey返回的可能是过时的数据,这一点是ConcurrentHashMap在弱一致性上的体现。如果要求强一致性,那么必须使用Collections.synchronizedMap()方法。
JDK1.8
在JDK1.7基础上的改进
改进一:取消segments字段,直接采用transient volatile Node
改进二:将原先table数组+单向链表的数据结构,变更为table数组+单向链表+红黑树的结构。对于hash表来说,最核心的能力在于将key hash之后能均匀的分布在数组中。如果hash之后散列的很均匀,那么table数组中的每个队列长度主要为0或者1。但实际情况并非总是如此理想,虽然ConcurrentHashMap类默认的加载因子为0.75,但是在数据量大或者运气不佳的情况下,还是会存在一些队列长度过长的情况,如果还是采用单向链表方式,那么查询某个节点的时间复杂度为O(n);因此,对于个数超过8的链表,jdk1.8中采用了红黑树的结构,那么查询的时间复杂度可以降低到O(logN),可以改进性能。
使用Node1.7为Entry作为链表的数据节点,仍然包含key,value,hash和next四个属性。红黑树的情况使用的是TreeNode extends Node。根据数组元素中,第一个节点数据类型是Node还是TreeNode可以判断该位置下是链表还是红黑树。
用于判断是否需要将链表转换为红黑树的阈值
static final int TREEIFY_THRESHOLD=8;
用于判断是否需要将红黑树转换为链表的阈值
static final int UNTREEIFY_THRESHOLD=6;
数据结构和属性
Node
Node是最核心的内部类,它包装了key-value键值对。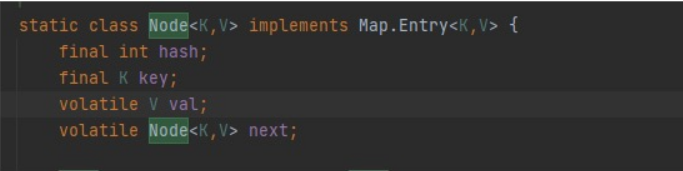
定义基本和1.7中的HashEntry相同。而这个map本身所持有的也是一个Node型的数组 transient volatile Node
增加了一个find方法来用以辅助map.get()方法。其实就是遍历链表,子类中会覆盖这个方法。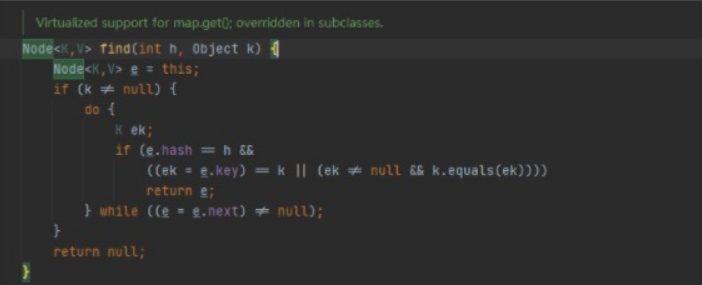
在map中还定义了Segment这个类,不过只是为了向前兼容而已。
TreeNode
树节点类,另外一个核心的数据结构。当链表长度过长的时候,会转换为TreeNode。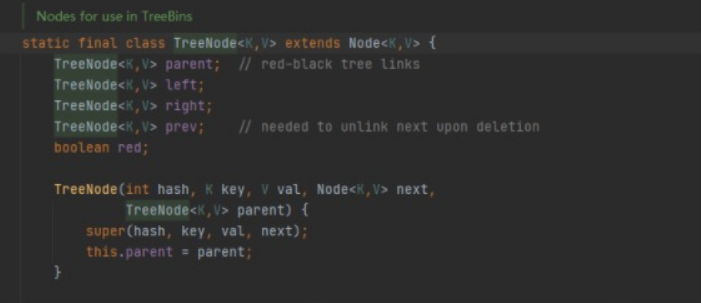
与1.8中HashMap不同点:
- 它并不是直接转换为红黑树,而是把这些节点放在TreeBin对象中,由TreeBin完成对红黑树的包装;
TreeNode在ConcurrentHashMap扩展自Node类,而并非HashMap中的扩展自LinkedHashMap.Entry
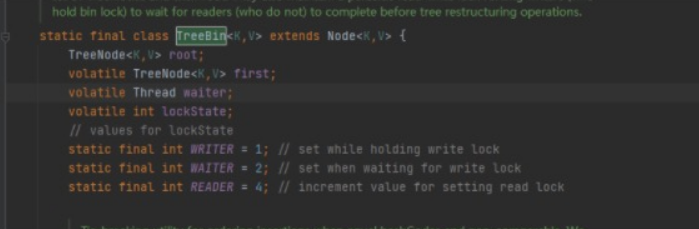
TreeBin
负责TreeNode节点。它代替了TreeNode的根节点,也就是说在实际的ConcurrentHashMap数组中,存放的是TreeBin对象,而不是TreeNode对象,另外这个类还带有了读写锁机制。
ForwardingNode
一个特殊的Node节点,hash值为-1,其中存储nextTable的引用。有table发生扩容的时候,ForwardingNode发挥作用,作为一个占位符放在table中表示当前节点为null或者已经被移动。
sizeCtl
用来控制table的初始化和扩容操作。
负数代表正在进行初始化或扩容操作- -1 代表正在初始化;
- -N 表示有N-1个线程正在进行扩容操作;
- 0 为默认值,代表当时的table还没有被初始化;
正数表示初始化大小或Map中的元素达到这个数量时,需要进行扩容了。
核心方法
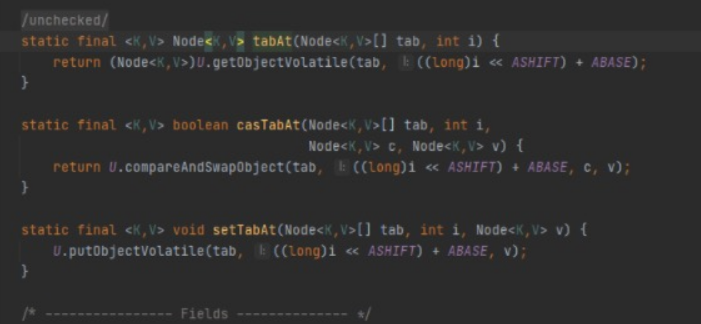
tabAt:利用硬件级别的原子操作,获得在i位置上的Node节点,Unsafe.getObjectVolatile()可以直接获取指定内存的数据,保证了每次拿到数据都是最新的。
casTabAt:利用CAS操作设置i位置上的node节点。
setTabAt:利用硬件级别的原子操作,设置在i位置上的node节点Unsafe.putObjectVolatile()可以直接设定指定内存的数据,保证了其他线程访问这个节点时一定可以看到最新的数据。
构造方法
可以发现,在new出一个map的实例时,并不会创建其中的数组等等相关的部件,只是进行简单的属性设置而已,同样的,table的大小也被规定为必须是2的乘方数,真正的初始化放在了是在向ConcurrentHashMap中插入元素的时候发生的。如调用put、computeIfAbsent、compute、merge等方法的时候,调用时机是检查table==null。
get方法
给定一个key来确定value的时候,必须满足两个条件key相同hash值相同,对于节点可能在链表或树上的情况,需要分别去查找。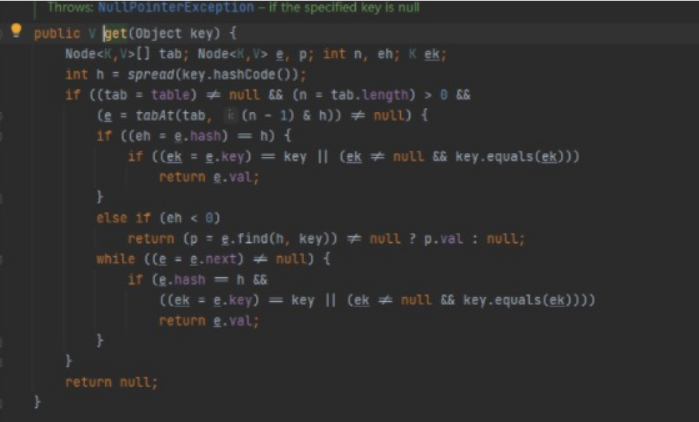
put方法
总结来说,put方法就是,沿用HashMap的put方法的思想,根据hash值计算这个新插入的点在table中的位置i,如果i位置是空的,直接放进去,否则进行判断,如果i位置是树节点,按照树的方式插入新的节点,否则把i插入到链表的末尾。
整体流程上,就是首先定义不允许key或value为null的情况放入,对于每一个放入的值,首先利用spread方法对key的hashcode进行一次hash计算,由此来确定这个值在table中的位置。
如果这个位置是空的,那么直接放入,而且不需要加锁操作。
如果这个位置存在节点,说明发生了hash碰撞,首先判断这个节点的类型。如果是链表节点,则得到的节点就是hash值相同的节点组成的链表的头节点。需要依次向后遍历确定这个新加入的值所在位置。如果遇到hash值与key值都与新加入节点是一致的情况,则只需要更新value值即可。否则依次向后遍历,直到链表尾插入这个节点。如果加入这个节点以后链表长度大于8,就把这个链表转换成红黑树。如果这个节点的类型已经是树节点的话,直接调用树节点的插入方法进行插入新的值。
初始化
构造方法中并没有真正初始化,真正的初始化在放在了在向ConcurrentHashMap中插入元素的时候发生的。具体实现的方法就是initTable。
private final Node<K,V>[] initTable() {Node<K,V>[] tab; int sc;while ((tab = table) == null || tab.length == 0) {//小于0表示有其他线程正在进行初始化操作,把当前线程CPU时间让出来,//因为对于table的初始化操作,只能有一个线程在进行if ((sc = sizeCtl) < 0)Thread.yield(); // lost initialization race; just spin//利用CAS操作把sizectl的值设置为-1,表示本线程正在进行初始化else if (U.compareAndSwapInt(this, SIZECTL, sc, -1)) {try {if ((tab = table) == null || tab.length == 0) {int n = (sc > 0) ? sc : DEFAULT_CAPACITY;@SuppressWarnings("unchecked")Node<K,V>[] nt = (Node<K,V>[])new Node<?,?>[n];table = tab = nt;//n右移2位,就是n变为n原值的1/4,sc=0.75*nsc = n - (n >>> 2);}} finally {//设置扩容阈值sizeCtl = sc;}break;}}return tab;}
transfer
当ConcurrentHashMap容量不足的时候,需要对table进行扩容。这个方法的基本思想跟HashMap是很像的,但是由于它是支持并发扩容的,所以要复杂的多。大概原理是,因为在扩容的时候,总是会涉及到从一个数组到另一个数组拷贝的操作,如果这个操作能够并发进行,就能利用并发处理去减少扩容带来的时间影响。
整个扩容操作分为两个部分:
1.构建一个nextTable,它的容量是原来的2倍;
2.将原来table中的元素复制到nextTable中,这里允许多线程进行操作;
整个扩容流程就是遍历和复制:
为null或者已经处理过的节点,会被设置为forwardNode节点,当线程准备扩容时,发现节点是forwardNode节点,跳过这个节点,继续寻找未处理的节点,找到了,对节点上锁,如果这个位置是Node节点(fh>=0),说明它是一个链表,就构造一个反序链表,把他们分别放在nextTable的i和i+n的位置上如果这个位置是TreeBin节点(fh<0),也做一个反序处理,并且判断是否需要红黑树转链表,把处理的结果分别放在nextTable的i和i+n的位置上,遍历过所有的节点以后就完成了复制工作,这时让nextTable作为新的table,并且更新sizeCtl为新容量的0.75倍,完成扩容。
并发扩容其实就是将数据迁移任务拆分成多个小迁移任务,在实现上使用了一个变量stride作为步长控制,每个线程每次负责迁移其中的一部分。
remove
移除方法的基本流程和put方法很类似,只不过操作由插入数据变为移除数据而已,如果存在红黑树的情况下,会检查是否需要将红黑树转为链表的步骤。
treeifyBin
用于将过长的链表转换为TreeBin对象。但是他并不是直接转换,而是进行一次容量判断,如果容量没有达到转换的要求,直接进行扩容操作并返回。如果满足条件才将链表的结构转换为TreeBin,这与HashMap不同的是,它并没有把TreeNode直接放入红黑树,而是利用了TreeBin这个小容器来封装所有的TreeNode。
size
在jdk1.8版本中,对于size的计算,在扩容和addCount()方法就已经有处理了,可以注意一下put方法,里面就有addCount()方法,早就计算好的,然后size的时候直接给你。jdk1.7是在调用size()方法才去计算,其实在并发集合中去计算size是没有多大意义的,因为size是实时在变的。
在具体实现上,计算大小的核心方法都是sumCount()。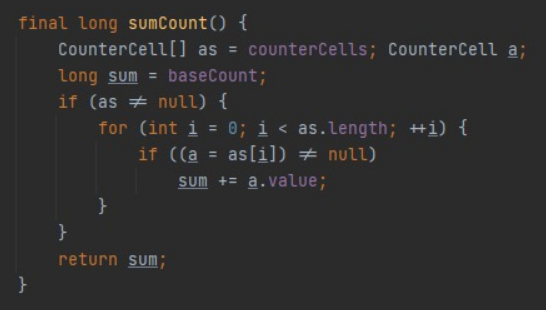
可以看见,统计数量时使用了baseCount和CounterCell类型的变量counterCells。其实baseCount就是记录容器数量的,而counterCells则是记录CAS更新baseCounter值时,由于高并发而导致失败的值。这两个变量的变化在addCount()方法中有体现,大致的流程就是:
1、对baseCount做CAS自增操作;
2、如果并发导致baseCountCAS失败了,则使用counterCells;
3、如果counterCells CAS失败了,在fullAddCount方法中,会继续死循环操作,直到成功。
问题一:JDK8中的ConcurrentHashMap为什么使用synchronized来进行加锁?
JDK8中使用synchronized加锁时,是对链表头结点和红黑树根结点来加锁的,而ConcurrentHashMap会保证,数组中某个位置的元素一定是链表的头结点或红黑树的根结点,所以JDK8中的ConcurrentHashMap在对某个桶进行并发安全控制时,只需要使用synchronized对当前那个位置的数组上的元素进行加锁即可,对于每个桶,只有获取到了第一个元素上的锁,才能操作这个桶,不管这个桶是一个链表还是红黑树。
相比于JDK7中使用ReentrantLock来加锁,因为JDK7中使用了分段锁,所以对于一个ConcurrentHashMap对象而言,分了几段就得有几个ReentrantLock对象,表示得有对应的几把锁。
而JDK8中使用synchronized关键字来加锁就会更节省内存,并且jdk也已经对synchronized的底层工作机制进行了优化,效率更好。
问题二:HashMap扩容流程是怎么样的?
- HashMap的扩容指的就是数组的扩容, 因为数组占用的是连续内存空间, 所以数组的扩容其实只能新开一个新的数组,然后把老数组上的元素转移到新数组上来,这样才是数组的扩容
2. 在HashMap中也是一样,先新建一个2倍数组大小的数组
3. 然后遍历老数组上的每一个位置,如果这个位置上是一个链表,就把这个链表上的元素转移到新数组上去
4. 在这个过程中就需要遍历链表,当然jdk7,和jdk8在这个实现时是有不一样的,jdk7就是简单的遍历链表上的每一个元素,然后按每个元素的hashcode结合新数组的长度重新计算得出一个下标,而重新得到的这个数组下标很可能和之前的数组下标是不一样的,这样子就达到了一种效果,就是扩容之后,某个链表会变短,这也就达到了扩容的目的,缩短链表长度,提高了查询效率
5. 而在jdk8中,因为涉及到红黑树,这个其实比较复杂,jdk8中其实还会用到 一个双向链表来维护红黑树中的元素,所以jdk8中在转移某个位置上的元素时,会去判断如果这个位置是一个红黑树,那么会遍历该位置的双向链表,遍历双向链表统计哪些元素在扩容完之后还是原位置,哪些元素在扩容之后在新位置,这样遍历完双向链表后,就会得到两个子链表,一个放在原下标位置, 一个放在新下标位置,如果原下标位置或新下标位置没有元素,则红黑树不用拆分,否则判断这两个子链表的长度,如果超过八,则转成红黑树放到对应的位置,否则把单向链表放到对应的位置。
6. 元素转移完了之后,再把新数组对象赋值给HashMap的table属性,老数组会被回收。问题三:解释下JAVA里面的直接内存
直接内存有一种叫法,堆外内存。
直接内存(堆外内存)指的是 Java 应用程序通过直接方式从操作系统中申请的内存。这个差别与之前的堆、栈、方法区,那些内存都是经过了虚拟化。所以严格来说,这里是指直接内存。

若有收获,就点个赞吧
0 人点赞
