在 Go 中,channel 类型为一等公民(first-class citizen),这意味着我们可以像普通变量那样使用 channel,比如:定义 channel 类型变量、给 channel 变量赋值、将 channel 作为参数传递给函数/方法、将 channel 作为返回值从函数/方法中返回,甚至将 channel 发送到其他 channel 中。
正是由于 channel 一等公民的特性,channel 原语使用起来很简单:
c := make(chan int) // 创建一个无缓冲(unbuffered)的int类型的channelc := make(chan int, 5) // 创建一个带缓冲的int类型的Channelc <- x // 向channel c中发送一个值<- c // 从channel c中接收一个值x = <- c // 从channel c接收一个值并将其存储到变量x中x, ok = <- c // 从channel c接收一个值。如果channel关闭了,那么ok将被置为falsefor i := range c { ... ... } // for range与channel结合使用close(c) // 关闭channel cc := make(chan chan int) // 创建一个无缓冲的chan int类型的channelfunc stream(ctx context.Context, out chan<- Value) error // 将只发送(send-only) channel作为函数参数func spawn(...) <-chan T // 将只接收(receive-only)类型channel作为返回值
当涉及同时对多个 channel 进行操作时,我们会结合使用到 Go 为 CSP 并发模型提供的另外一个原语:select。通过 select,我们可以同时在多个 channel 上进行发送/接收操作:
select {case x := <-c1: // 从channel c1接收数据... ...case y, ok := <-c2: // 从channel c2接收数据,并根据ok值判断c2是否已经关闭... ...case c3 <- z: // 将z值发送到channel c3中:... ...default: // 当上面case中的channel通信均无法实施时,执行该默认分支}
1. 无缓冲(unbuffered)channel
无缓冲 channel 兼具通信和同步特性,在并发程序中应用颇为广泛。我们可以通过不带有capacity参数的内置 make 函数创建一个可用的无缓冲 channel:
c := make(chan T) // T为channel中元素的类型
由于无缓冲 channel 的运行时层实现不带有缓冲区,因此对无缓冲 channel 的接收和发送操作是同步的,即对同一个无缓冲 channel,只有对其进行接收操作的 goroutine 和对其进行发送操作的 goroutine 都存在的情况下,通信才能得以进行,否则单方面的操作会让对应的 goroutine 陷入挂起状态。
各种顺序:
- 如果一个无缓冲 channel 没有任何 goroutine 对其进行接收操作,一旦此时有 goroutine 先对其进行发送操作,那么动作发生和完成的时序如下:
发送动作发生 -> 接收动作发生(有goroutine对其进行接收操作) -> 发送动作完成/接收动作完成(先后顺序不能确定)
- 如果一个无缓冲 channel 没有任何 goroutine 对其进行发送操作,一旦此时有 goroutine 先对其进行接收操作,那么动作发生和完成的时序如下:
接收动作发生 -> 发送动作发生(有goroutine对其进行发送操作) -> 发送动作完成/接收动作完成(先后顺序不确定)
因此,根据上述时序结果,对于无缓冲 channel 而言,我们得到以下结论:
- 发送动作一定发生在接收动作完成之前;
- 接收动作一定发生在发送动作完成之前。
想接收要先有发送, 想发送要先有接收.
这与 Go 官方“Go 内存模型”一文中对 channel 通信的描述是一致的。也正因为如此,下面的代码可以保证main输出的变量 a 的值为”hello, world”,因为函数 f 中的 channel 接收动作发生在主 goroutine 对 channel 发送动作完成之前,而a = “hello, world”语句又发生在 channel 接收动作之前,因此主 goroutine 在 channel 发送操作完成后看到的变量 a 的值一定是”hello, world”,而不是空字符串。
// go-channel-case-1.gopackage mainimport "time"var c = make(chan int)var a stringfunc f() {a = "hello, world"<-c}func main() {go f()c <- 5println(a)}
我觉得
因为函数 f 中的 channel 接收动作发生在主 goroutine 对 channel 发送动作完成之前这句还有另一种情况: 发送动作在接收动作之前.
1) 用作信号传递
a) 1 对 1 通知信号
无缓冲 channel 常被用于在两个 goroutine 之间 1 对 1 的传递通知信号,比如下面这个例子:
// go-channel-case-2.gopackage mainimport ("fmt""time")type signal struct{}func worker() {println("worker is working...")time.Sleep(1 * time.Second)}func spawn(f func()) <-chan signal {c := make(chan signal)go func() {println("worker start to work...")f()c <- signal(struct{}{})}()return c}func main() {println("start a worker...")c := spawn(worker)<-cfmt.Println("worker work done!")}
我们来运行一下这个例子:
$go run go-channel-case-2.gostart a worker...worker start to work...worker is working...worker work done!
b) 1 对 n 通知信号
有些时候,无缓冲 channel 还被用来实现1 对 n 的信号通知机制。这样的信号通知机制常被用于协调多个 goroutine 一起工作,比如下面的例子:
// go-channel-case-3.gopackage mainimport ("fmt""sync""time")type signal struct{}func worker(i int) {fmt.Printf("worker %d: is working...\n", i)time.Sleep(1 * time.Second)fmt.Printf("worker %d: works done\n", i)}func spawnGroup(f func(i int), num int, groupSignal <-chan signal) <-chan signal {c := make(chan signal)var wg sync.WaitGroupfor i := 0; i < num; i++ {wg.Add(1)go func(i int) {<-groupSignalfmt.Printf("worker %d: start to work...\n", i)f(i)wg.Done()}(i + 1)}go func() {wg.Wait()c <- signal(struct{}{})}()return c}func main() {fmt.Println("start a group of workers...")groupSignal := make(chan signal)c := spawnGroup(worker, 5, groupSignal)time.Sleep(5 * time.Second)fmt.Println("the group of workers start to work...")close(groupSignal)<-cfmt.Println("the group of workers work done!")}
在上面例子中,main goroutine 创建了一组 5 个 worker goroutine,这些 goroutine 启动后会阻塞在名为 groupSignal 的无缓冲 channel 上。main goroutine 通过close(groupSignal)向所有 worker goroutine 广播出“开始工作”的信号,所有 worker goroutine 在收到 groupSignal 后“一起”开始工作,就像起跑线上的运动员听到了裁判员发出的起跑信号枪声。
**
这个例子的运行结果如下:
$go run go-channel-case-3.gostart a group of workers...the group of workers start to work...worker 3: start to work...worker 3: is working...worker 4: start to work...worker 4: is working...worker 1: start to work...worker 1: is working...worker 5: start to work...worker 5: is working...worker 2: start to work...worker 2: is working...worker 3: works doneworker 4: works doneworker 5: works doneworker 1: works doneworker 2: works donethe group of workers work done!
我们看到:关闭一个无缓冲 channel 会让所有阻塞在该 channel 上的接收操作返回,从而实现一种 1 对 n 的“广播”机制。该 1 对 n 的信号通知机制还常用于通知一组 worker goroutine 退出,比如下面例子:
// go-channel-case-4.gopackage mainimport ("fmt""sync""time")type signal struct{}func worker(i int, quit <-chan signal) {fmt.Printf("worker %d: is working...\n", i)LOOP:for {select {default:// 模拟worker工作time.Sleep(1 * time.Second)case <-quit:break LOOP}}fmt.Printf("worker %d: works done\n", i)}func spawnGroup(f func(int, <-chan signal), num int, groupSignal <-chan signal) <-chan signal {c := make(chan signal)var wg sync.WaitGroupfor i := 0; i < num; i++ {wg.Add(1)go func(i int) {fmt.Printf("worker %d: start to work...\n", i)f(i, groupSignal)wg.Done()}(i + 1)}go func() {wg.Wait()c <- signal(struct{}{})}()return c}func main() {fmt.Println("start a group of workers...")groupSignal := make(chan signal)c := spawnGroup(worker, 5, groupSignal)fmt.Println("the group of workers start to work...")time.Sleep(5 * time.Second)// 通知workers退出fmt.Println("notify the group of workers to exit...")close(groupSignal)<-cfmt.Println("the group of workers work done!")}
运行该示例:
$go run go-channel-case-4.gostart a group of workers...the group of workers start to work...worker 1: start to work...worker 1: is working...worker 3: start to work...worker 3: is working...worker 5: start to work...worker 5: is working...worker 4: start to work...worker 4: is working...worker 2: start to work...worker 2: is working...notify the group of workers to exit...worker 2: works doneworker 4: works doneworker 5: works doneworker 1: works doneworker 3: works donethe group of workers work done!
2) 用于替代锁机制
无缓冲 channel 具有同步特性,这让它在某些场合可以替代锁,从而使得程序更加清晰,可读性更好。下面是一个传统的基于“共享内存”+“锁”模式的 goroutine 安全的计数器的实现:
// go-channel-case-5.gopackage mainimport ("fmt""sync""time")type counter struct {sync.Mutexi int}var cter counterfunc Increase() int {cter.Lock()defer cter.Unlock()cter.i++return cter.i}func main() {for i := 0; i < 10; i++ {go func(i int) {v := Increase()fmt.Printf("goroutine-%d: current counter value is %d\n", i, v)}(i)}time.Sleep(5 * time.Second)}
下面是我们使用无缓冲 channel 替代锁后的实现:
// go-channel-case-6.gopackage mainimport ("fmt""time")type counter struct {c chan inti int}var cter counterfunc InitCounter() {cter = counter{c: make(chan int),}go func() {for {cter.i++cter.c <- cter.i}}()fmt.Println("counter init ok")}func Increase() int {return <-cter.c // 多个 goroutine 顺序读}func init() {InitCounter()}func main() {for i := 0; i < 10; i++ {go func(i int) {v := Increase()fmt.Printf("goroutine-%d: current counter value is %d\n", i, v)}(i)}time.Sleep(5 * time.Second)}
运行该示例,我们得到如下结果:
$go run go-channel-case-6.gocounter init okgoroutine-9: current counter value is 10goroutine-0: current counter value is 1goroutine-6: current counter value is 7goroutine-2: current counter value is 3goroutine-8: current counter value is 9goroutine-4: current counter value is 5goroutine-5: current counter value is 6goroutine-1: current counter value is 2goroutine-7: current counter value is 8goroutine-3: current counter value is 4
2. 带缓冲(buffered)channel
和无缓冲 channel 不同,我们通过带有capacity参数的内置 make 函数可以创建一个可用的带缓冲 channel:
c := make(chan T, capacity) // T为channel中元素的类型, capacity为带缓冲channel的缓冲区容量
1) 用作消息队列
和无缓冲 channel 更多用于信号/事件管道相比,可自行设置容量、异步收发的带缓冲 channel 更适合被用作为消息队列,并且带缓冲 channel 在数据收发性能上要明显好于无缓冲 channel。下面是一些关于无缓冲 channel 和带缓冲 channel 收发性能测试的结果(Go 1.13.6, MacBook Pro 8 核):
- 单接收单发送性能基准测试
我们先来看看针对一个 channel 只有一个发送 goroutine 和一个接收 goroutine 的情况下,两种 channel 的收发性能比对数据:
// 无缓冲channel// go-channel-operation-benchmark/unbuffered-chan$go test -bench . one_to_one_test.gogoos: darwingoarch: amd64BenchmarkUnbufferedChan1To1Send-8 6202120 198 ns/opBenchmarkUnbufferedChan1To1Recv-8 6752820 178 ns/opPASSok command-line-arguments 2.811s// 带缓冲channel// go-channel-operation-benchmark/buffered-chan$go test -bench . one_to_one_cap_10_test.gogoos: darwingoarch: amd64BenchmarkBufferedChan1To1SendCap10-8 14397186 83.7 ns/opBenchmarkBufferedChan1To1RecvCap10-8 14275723 82.2 ns/opPASSok command-line-arguments 2.555s$go test -bench . one_to_one_cap_100_test.gogoos: darwingoarch: amd64BenchmarkBufferedChan1To1SendCap100-8 18011007 65.5 ns/opBenchmarkBufferedChan1To1RecvCap100-8 18031082 65.4 ns/opPASSok command-line-arguments 2.499s
- 多接收多发送性能基准测试
我们再来看看针对一个 channel 有多个发送 goroutine 和多个接收 goroutine 的情况下,两种 channel 的收发性能比对数据(这里建立 10 个发送 goroutine 和 10 个接收 goroutine):
// 无缓冲channel// go-channel-operation-benchmark/unbuffered-chan$go test -bench . multi_to_multi_test.gogoos: darwingoarch: amd64BenchmarkUnbufferedChanNToNSend-8 317324 3793 ns/opBenchmarkUnbufferedChanNToNRecv-8 295288 4139 ns/opPASSok command-line-arguments 2.516s// 带缓冲channel// go-channel-operation-benchmark/buffered-chan$go test -bench . multi_to_multi_cap_10_test.gogoos: darwingoarch: amd64BenchmarkBufferedChanNToNSendCap10-8 534625 2252 ns/opBenchmarkBufferedChanNToNRecvCap10-8 476221 2752 ns/opPASSok command-line-arguments 2.573s$go test -bench . multi_to_multi_cap_100_test.gogoos: darwingoarch: amd64BenchmarkBufferedChanNToNSendCap100-8 1000000 1283 ns/opBenchmarkBufferedChanNToNRecvCap100-8 1000000 1250 ns/opPASSok command-line-arguments 2.564s
综合以上结果数据,我们可以得到两个结论:
- 无论是 1 收 1 发还是多收多发,带缓冲 channel 的收发性能要好于无缓冲 channel;
- 对于带缓冲 channel 而言,选择适当容量会在一定程度上提升一定收发性能
2) 用作计数信号量(counting semaphore)
Go 并发设计的一个惯用法就是将带缓冲 channel 用作计数信号量(counting semaphore)。带缓冲 channel 中的当前数据个数代表的是当前同时处于活动状态(处理业务)的 goroutine 的数量,而带缓冲 channel 的容量(capacity)就代表了允许同时处于活动状态的 goroutine 的最大数量。向带缓冲 channel 的一个发送操作表示获取一个信号量,而从 channel 的一个接收操作则表示释放一个信号量。
下面是一个将带缓冲 channel 用作计数信号量的例子:
// go-channel-case-7.gopackage mainimport ("log""sync""time")var active = make(chan struct{}, 3)var jobs = make(chan int, 10)func main() {go func() {for i := 0; i < 8; i++ {jobs <- (i + 1)}close(jobs)}()var wg sync.WaitGroupfor j := range jobs {wg.Add(1)go func(j int) {active <- struct{}{}log.Printf("handle job: %d\n", j)time.Sleep(2 * time.Second)<-activewg.Done()}(j)}wg.Wait()}
我们看到:上面的示例创建了一组 goroutines 来处理 job,同一时间允许的最多 3 个 goroutine 处于活动状态。为达成这一目标,我们看到示例使用了一个容量(capacity)为 3 的带缓冲 channel: active作为计数信号量,这意味着允许同时处于活动状态的最大 goroutine 数量为 3。我们运行一下该示例:
$go run go-channel-case-7.go2020/02/04 09:57:02 handle job: 82020/02/04 09:57:02 handle job: 42020/02/04 09:57:02 handle job: 12020/02/04 09:57:04 handle job: 22020/02/04 09:57:04 handle job: 32020/02/04 09:57:04 handle job: 72020/02/04 09:57:06 handle job: 62020/02/04 09:57:06 handle job: 5
3) len(channel)的应用
len是 Go 语言的一个built-in 函数,它支持接受数组、切片、map、字符串和 channel 类型的参数,并返回对应类型的“长度” - 一个整型值。以len(s)为例:
- 如果 s 是字符串类型(string),len(s) 返回字符串中的字节个数;
- 如何 s 是 [n]T 或 *[n]T 的数组类型,len(s) 返回数组的长度 n;
- 如果 s 是 []T 的切片类型(slice),len(s) 返回切片的当前长度;
- 如果 s 是 map[K]T 的 map 类型,len(s) 返回 map 中的已定义的 key 的个数;
- 如果 s 是 chan T 类型,那么 len(s) 针对 channel 的类型不同,有如下两种语义:
- 当 s 为无缓冲 channel 时,len(s) 总是返回 0;
- 当 s 为带缓冲 channel 时,len(s) 返回当前 channel s 中尚未被读取的元素个数。
这样一来,针对带缓冲 channel 的 len 调用似乎才是有意义的。那我们是否可以使用 len 函数来实现带缓冲 channel 的“判满”、“判有”和“判空”逻辑呢,就像下面示例中伪代码这样:
var c chan T = make(chan T, capacity)// 判空if len(c) == 0 {// 此时channel c空了?}// 判有if len(c) > 0 {// 此时channel c有数据?}// 判满if len(channel) == cap(channel) {// 此时channel c满了?}
大家看到我在上面代码注释的“空了”、“有数据”和“满了”的后面打上了问号!channel 原语用于多个 goroutine 间的通信,一旦多个 goroutine 共同对 channel 进行收发操作,len(channel)就会在多个 goroutine 间形成“竞态”,单纯地依靠 len(channel)来判断 channel 中元素状态,不能保证在后续对 channel 的收发时 channel 状态是不变的。以判空为例:
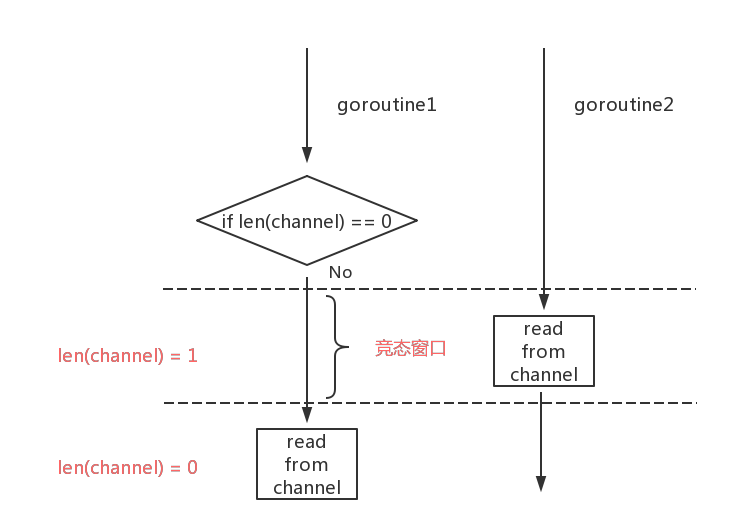
从上图可以看到,当 goroutine1 使用 len(channel)判空后,便尝试从 channel 中接收数据。但在真正从 channel 读数据前,另外一个 goroutine2 已经将数据读了出去,goroutine1 后面的读取将阻塞在 channel 上,导致后面逻辑的失效。因此,为了不阻塞在 channel 上,常见的方法是将“判空与读取”放在一个“事务”中,将“判满与写入”放在一个“事务”中,而这类“事务”我们可以通过 select 实现。我们来看下面示例:
// go-channel-case-8.gopackage mainimport ("fmt""time")func producer(c chan<- int) {var i int = 1for {time.Sleep(2 * time.Second)ok := trySend(c, i)if ok {fmt.Printf("[producer]: send [%d] to channel\n", i)i++continue}fmt.Printf("[producer]: try send [%d], but channel is full\n", i)}}func tryRecv(c <-chan int) (int, bool) {select {case i := <-c:return i, truedefault:return 0, false}}func trySend(c chan<- int, i int) bool {select {case c <- i:return truedefault:return false}}func consumer(c <-chan int) {for {i, ok := tryRecv(c)if !ok {fmt.Println("[consumer]: try to recv from channel, but the channel is empty")time.Sleep(1 * time.Second)continue}fmt.Printf("[consumer]: recv [%d] from channel\n", i)if i >= 3 {fmt.Println("[consumer]: exit")return}}}func main() {c := make(chan int, 3)go producer(c)go consumer(c)select {} // 故意阻塞在此}
我们看到由于用到了 select 原语的 default 分支语义,当 channel 空的时候,tryRecv 不会阻塞;当 channel 满的时候,trySend 也不会阻塞。我们运行一下该示例:
$go run go-channel-case-8.go[consumer]: try to recv from channel, but the channel is empty[consumer]: try to recv from channel, but the channel is empty[producer]: send [1] to channel[consumer]: recv [1] from channel[consumer]: try to recv from channel, but the channel is empty[consumer]: try to recv from channel, but the channel is empty[producer]: send [2] to channel[consumer]: recv [2] from channel[consumer]: try to recv from channel, but the channel is empty[consumer]: try to recv from channel, but the channel is empty[producer]: send [3] to channel[consumer]: recv [3] from channel[consumer]: exit[producer]: send [4] to channel[producer]: send [5] to channel[producer]: send [6] to channel[producer]: try send [7], but channel is full[producer]: try send [7], but channel is full[producer]: try send [7], but channel is full
这种方法可以适合大多数的场合,但是这种方法有一个“问题”,那就是它改变了 channel 的状态:接收了一个元素或发送了一个元素。有些时候我们不想这么做,我们想在不改变 channel 状态的前提下单纯地侦测 channel 的状态而又不会因 channel 满或空阻塞在 channel 上。但很遗憾,目前没有一种方法可以在实现这样的功能的同时又适用于所有场合。但是在特定的场景下,我们可以用 len(channel)来实现。比如下面这两种场景:
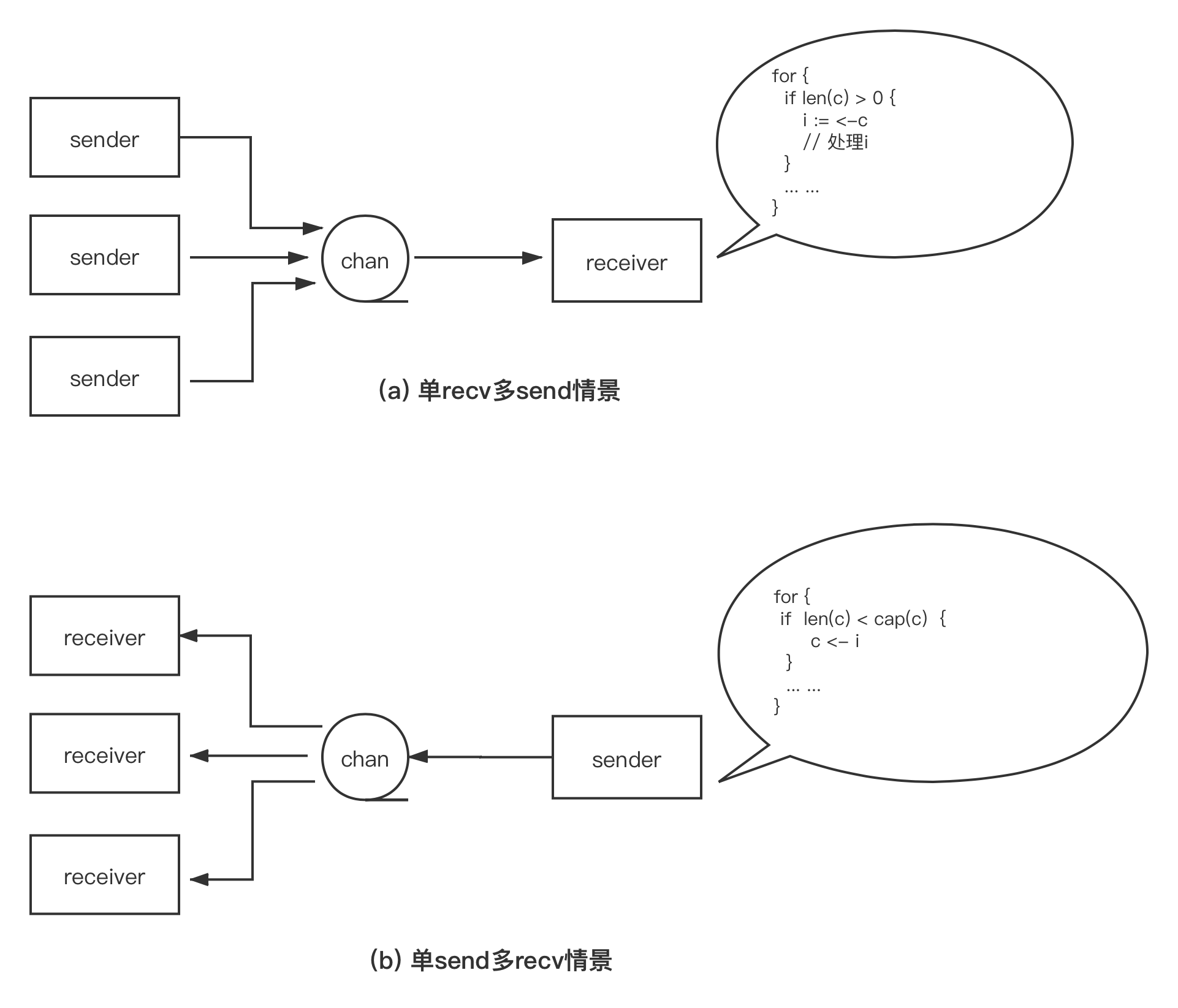
只能是1对多的情况下使用 len(chan).
3. nil channel 的妙用
对一个没有初始化的 channel(nil channel)进行读写操作都将发生阻塞,比如下面这段代码:
func main() {var c chan int<-c}或者func main() {var c chan intc<-1}
上述无论哪段代码被执行,我们将得到类似如下的错误信息:
fatal error: all goroutines are asleep - deadlock!goroutine 1 [chan receive (nil chan)]:或goroutine 1 [chan send (nil chan)]:
main goroutine 被阻塞在 channel 上,导致 Go 运行时认为“deadlock”状态出现而抛出 panic。
但 nil channel 也不是一无是处,有些时候妙用 nil channel 可以得到事半功倍的效果。我们来看一个例子:
// go-channel-case-9.gopackage mainimport "fmt"import "time"func main() {c1, c2 := make(chan int), make(chan int)go func() {time.Sleep(time.Second * 5)c1 <- 5close(c1)}()go func() {time.Sleep(time.Second * 7)c2 <- 7close(c2)}()var ok1, ok2 boolfor {select {case x := <-c1:ok1 = truefmt.Println(x)case x := <-c2:ok2 = truefmt.Println(x)}if ok1 && ok2 {break}}fmt.Println("program end")}
在这个示例中,我们期望程序在接收完 c1 和 c2 两个 channel 上的数据后就退出。但实际的运行情况如下:
$go run go-channel-case-9.go5000... ... //循环输出07program end
我们怎么来改进一下这个程序使之能按照我们的预期输出呢?nil channel 是时候登场了!改进后的示例代码如下:
// go-channel-case-10.gopackage mainimport "fmt"import "time"func main() {c1, c2 := make(chan int), make(chan int)go func() {time.Sleep(time.Second * 5)c1 <- 5close(c1)}()go func() {time.Sleep(time.Second * 7)c2 <- 7close(c2)}()for {select {case x, ok := <-c1:if !ok {c1 = nil} else {fmt.Println(x)}case x, ok := <-c2:if !ok {c2 = nil} else {fmt.Println(x)}}if c1 == nil && c2 == nil {break}}fmt.Println("program end")}
上面改进后的示例程序的一个最关键的变化是在判断 c1 或 c2 被关闭后,将显式地将 c1 或 c2 置为 nil。我们知道:对一个 nil channel 执行获取操作,该操作将阻塞,于是已经被置为 nil 的 c1 或 c2 的分支将再也不会被 select 选中执行。于是上述改进后的示例的运行结果如下:
$go run go-channel-case-10.go57program end
4. 与 select 结合使用的一些惯用法
1) 利用 default 分支避免阻塞
在 Go 标准库中,这个惯用法也有应用,比如:
// $GOROOT/src/time/sleep.gofunc sendTime(c interface{}, seq uintptr) {// 无阻塞的向c发送当前时间// ...select {case c.(chan Time) <- Now():default:}}
2) 实现超时机制
带超时机制的 select 是 Go 一种常见的 select 和 channel 的组合用法,通过超时事件,我们既可以避免长期陷入某种操作的等待中,也可以做一些异常处理工作。下面示例代码实现了一次具有 30s 超时的 select:
func worker() {select {case <-c:// ... do some stuffcase <-time.After(30 *time.Second):return}}
应用带有超时机制的 select 时,要特别注意 timer 使用后的释放,尤其在大量创建 timer 时。
- Go 语言标准库提供的 timer 实质上是由 Go 运行时自行维护的,而不是操作系统级的定时器资源。
- Go 运行时启动了一个单独的 goroutine,该 goroutine 执行了一个名为timerproc的函数,维护了一个“最小堆”。
- 该 goroutine 会定期被唤醒并读取堆顶的 timer 对象,执行该 timer 对象对应的函数(向 timer.C 中发送一条数据,触发定时器),执行完毕后就会从最小堆中移除该 timer 对象。
- 创建一个 time.Timer 实则就是在这个最小堆中添加一个 timer 对象实例,而调用 timer.Stop 方法则是从堆中删除对应的 timer 对象。
3) 实现心跳机制
结合 time 包的 Ticker,我们可以实现带有心跳机制的 select。这种机制使得我们可以在监听 channel 的同时,执行一些周期性的任务,比如下面这段代码:
func worker() {heartbeat := time.NewTicker(30 * time.Second)defer heartbeat.Stop()for {select {case <-c:// ... do some stuffcase <- heartbeat.C://... do heartbeat stuff}}}

若有收获,就点个赞吧
0 人点赞
