气动夹爪的应用,在实际的自动化生产中是非常普遍的,一个设备上少则几个,多则几十个上百个气缸都是很普遍的,所有我们有必要弄懂气缸的工作原理和气动夹爪的应用 ,而这些气动执行元件都是有一个叫“电磁阀”的东西控制的,那什么是电磁阀呢?
电磁阀(Electromagnetic valve)是用电磁控制的工业设备,是用来控制流体的自动化基础元件,属于执行器,并不限于液压、气动。用在工业控制系统中调整介质的方向、流量、速度和其他的参数。电磁阀可以配合不同的电路来实现预期的控制,而控制的精度和灵活性都能够保证。电磁阀有很多种,不同的电磁阀在控制系统的不同位置发挥作用,最常用的是单向阀、安全阀、方向控制阀、速度调节阀等。
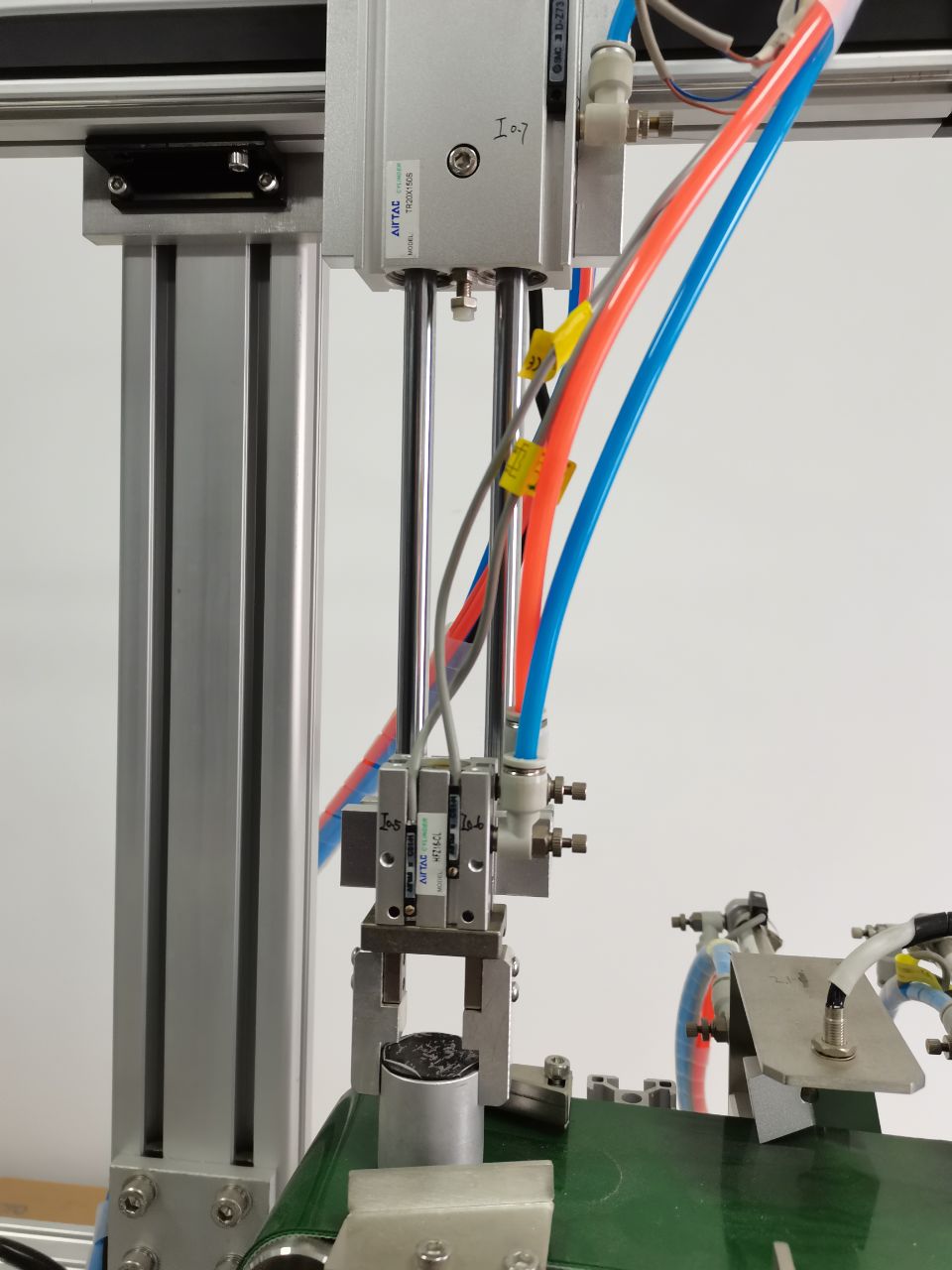
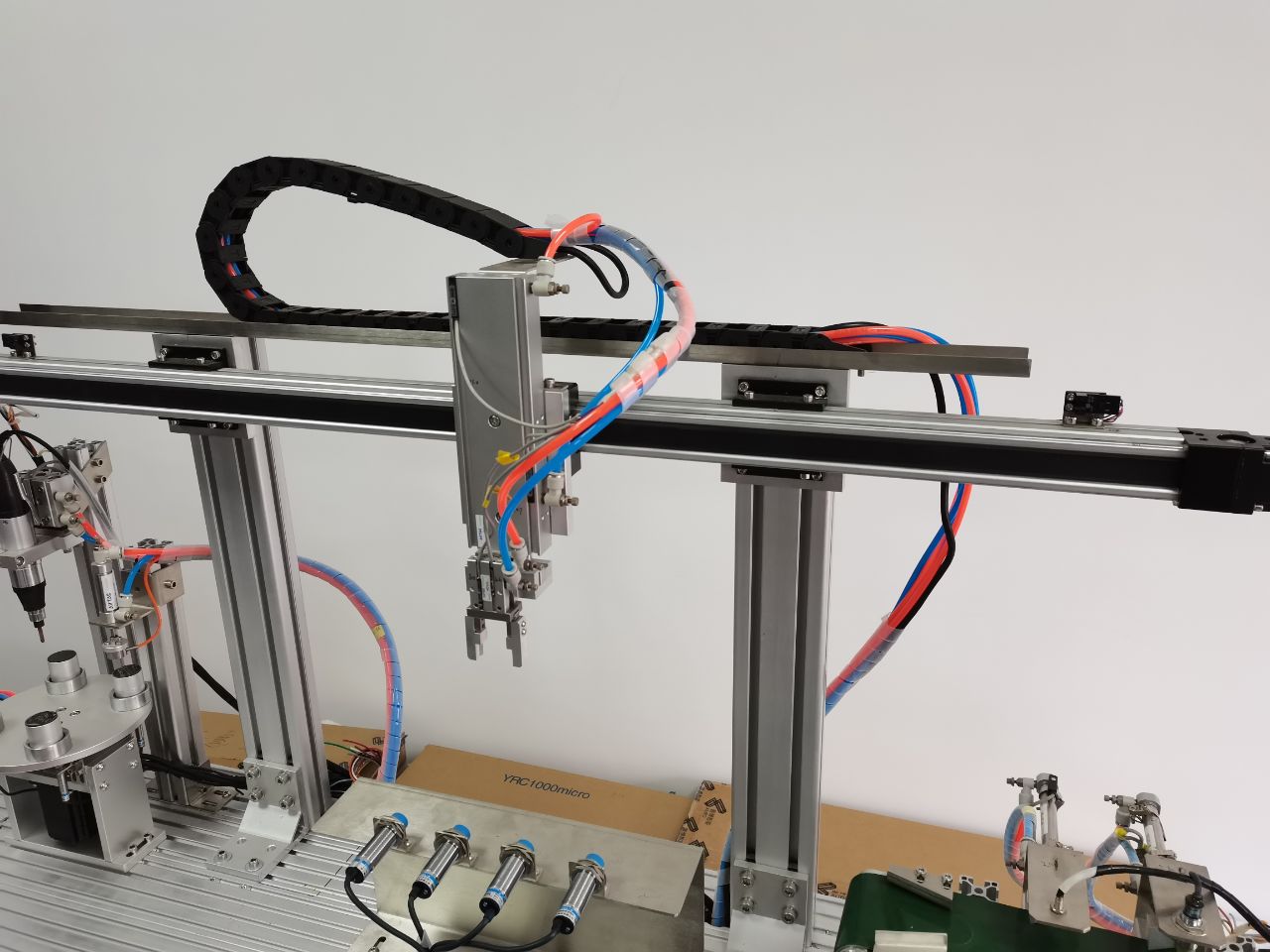
先给大家上几张图: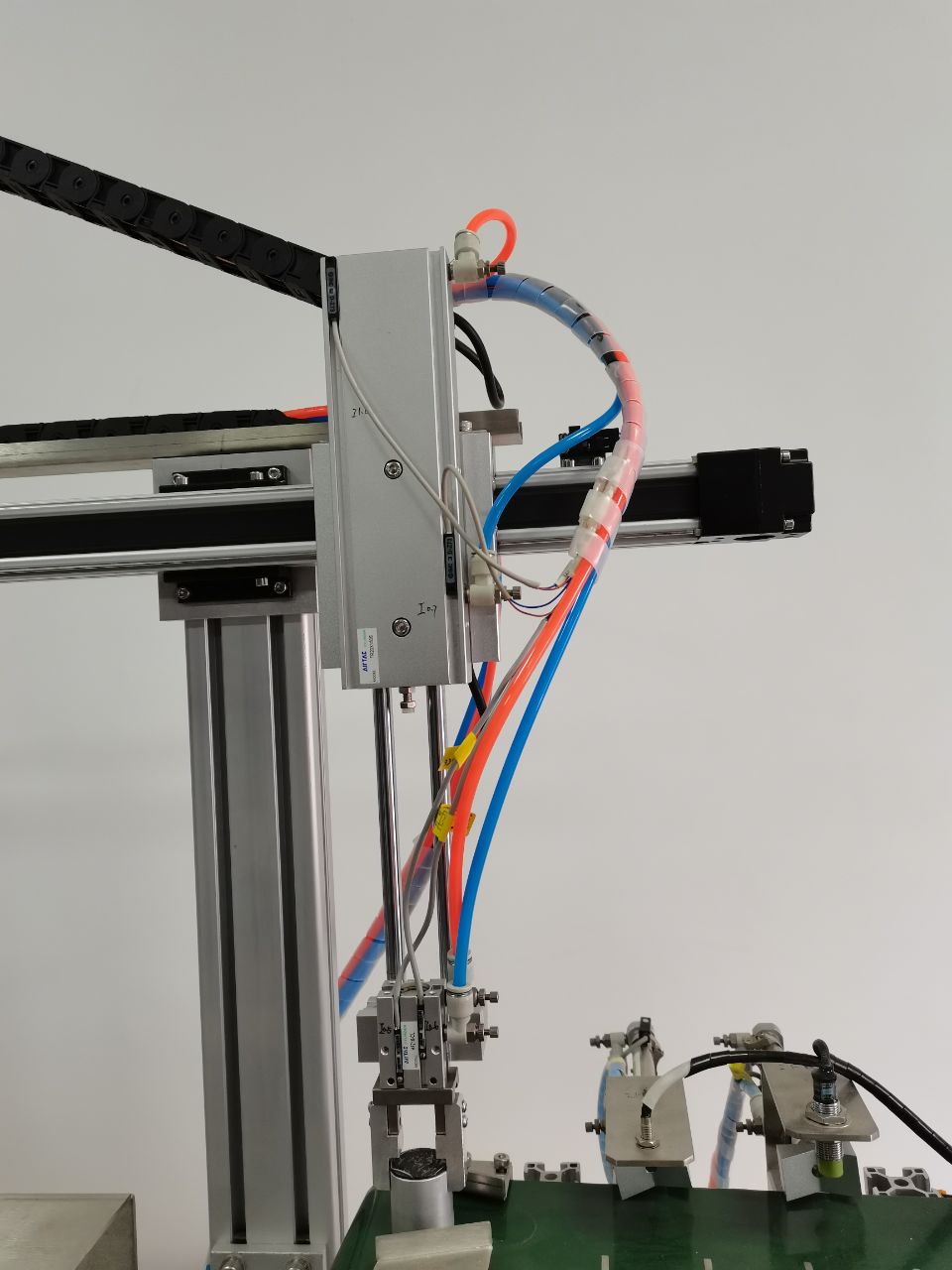



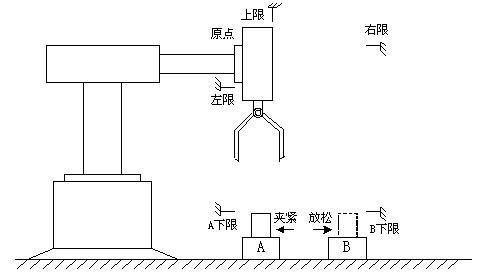
1. 了解控制要求
1.1 系统要求机械手将A位置的物体搬运到B处
1.2 机械手原点位置停在A位置的正上方,夹爪处于打开状态
1.3 收到搬运命令后,机械手开始下降,下降到位后,加紧物体,加紧到位后,开始 上升,上升到位后,开始右移,右移到B位置后,开始下降,下降到位后,放松物体,放松到位后,开始上升,上升到位后,左移到A位置,也就是最后要回到原位。
这个是我给大家梳理的控制流程图: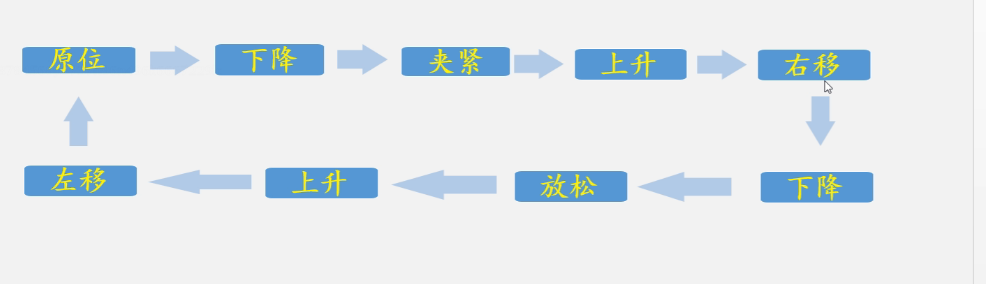
2. **分配io点位 
3. 知识点
3.1 认识定时器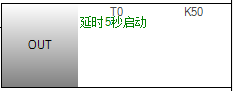 **
**
T0是定时器编号,K50是延时时间,注意:这里的定时器是以100ms为单位的
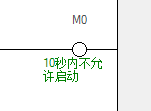
3.2 认识PLC内部的辅助继电器
 线圈
线圈 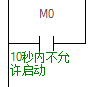 常开触点
常开触点  常闭触点
常闭触点
M0是内部辅助继电器,和输入输出继电器不同,它不对外输出,也不会直接接收外部信号
3.3 认识数据寄存器 D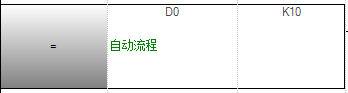
= 是比较指令,意思是当D0里面的数值等于10的时候,条件接通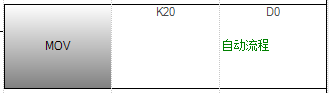
MOV 是赋值指令,意思是当条件接通时,把20放到数据寄存器D20里面
注:K 在三菱PLC里面表示十进制的意思
3.4 认识SET RST 置位和复位指令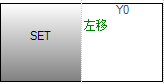 SET 相当于一个本身带自锁的“按钮”,当触发后,不需要写自锁程序,因为它本身就带“自锁”功能。它会使信号一直保持为TRUE的状态,直到RST对其复位!
SET 相当于一个本身带自锁的“按钮”,当触发后,不需要写自锁程序,因为它本身就带“自锁”功能。它会使信号一直保持为TRUE的状态,直到RST对其复位!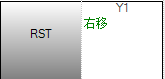 RST 相当于对把带自锁的“按钮”进行复位,当触发后,它会使信号一直保持为FALSE的状态,直到SET再次置位!
RST 相当于对把带自锁的“按钮”进行复位,当触发后,它会使信号一直保持为FALSE的状态,直到SET再次置位!
3.5 熟悉常用的快捷键
F2 写入模式
F3 监控模式
SHIFT+F3 在线监控
F4 在线写入
CTRL + 上下左右箭头 进行连线和删除
SHIFT + ENTER 修改值
SHIFT + INSERT 插入一行
CTRL + INSERT 插入一列
4. **编写梯形图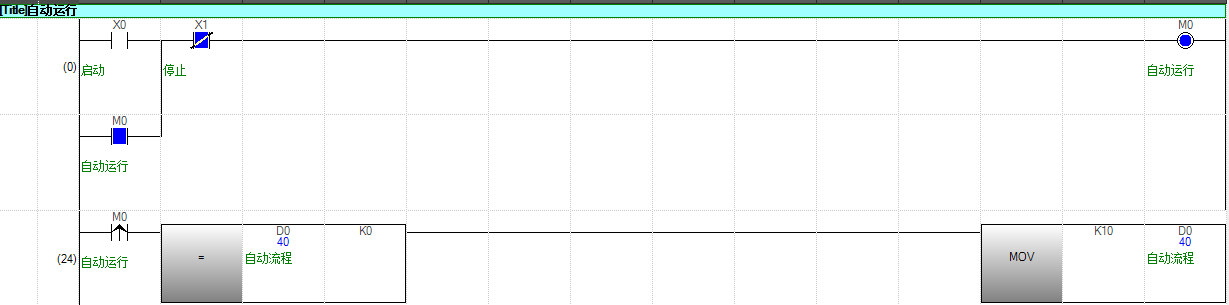
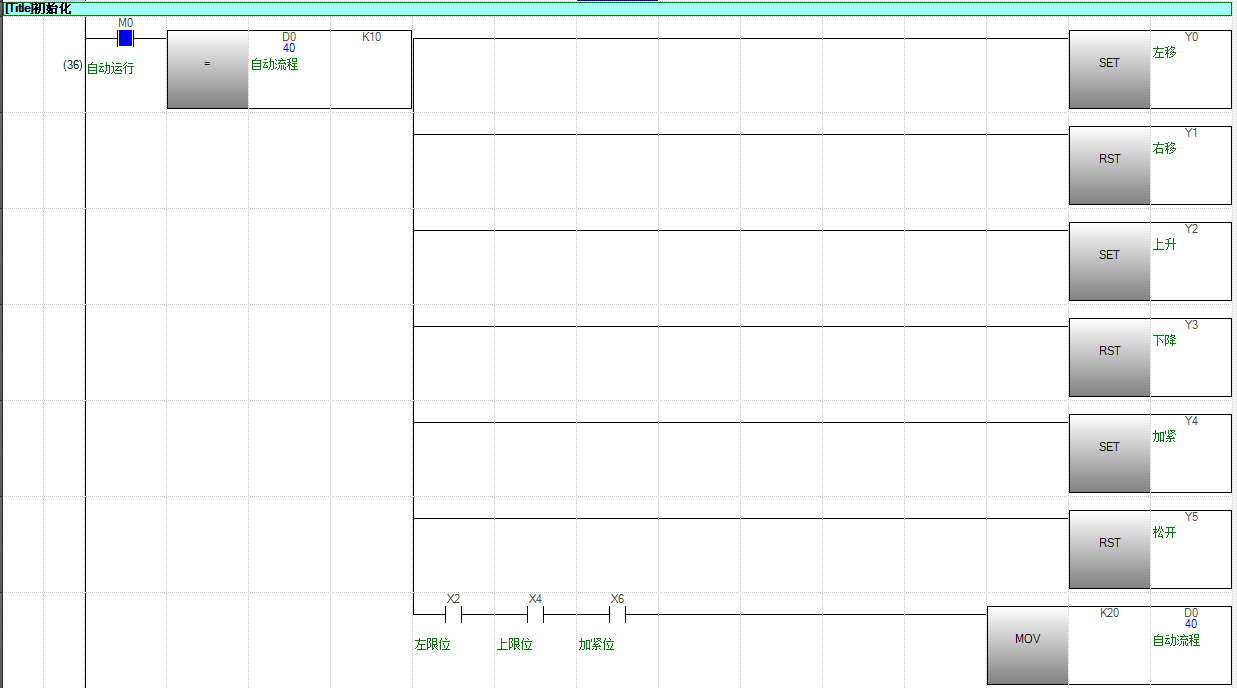
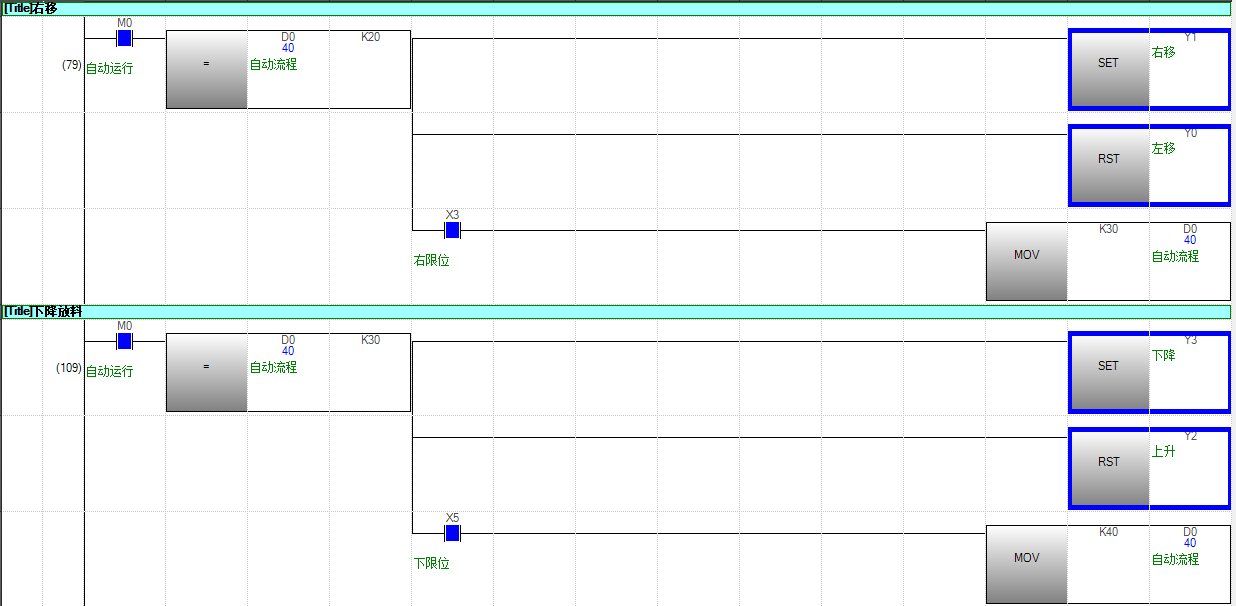
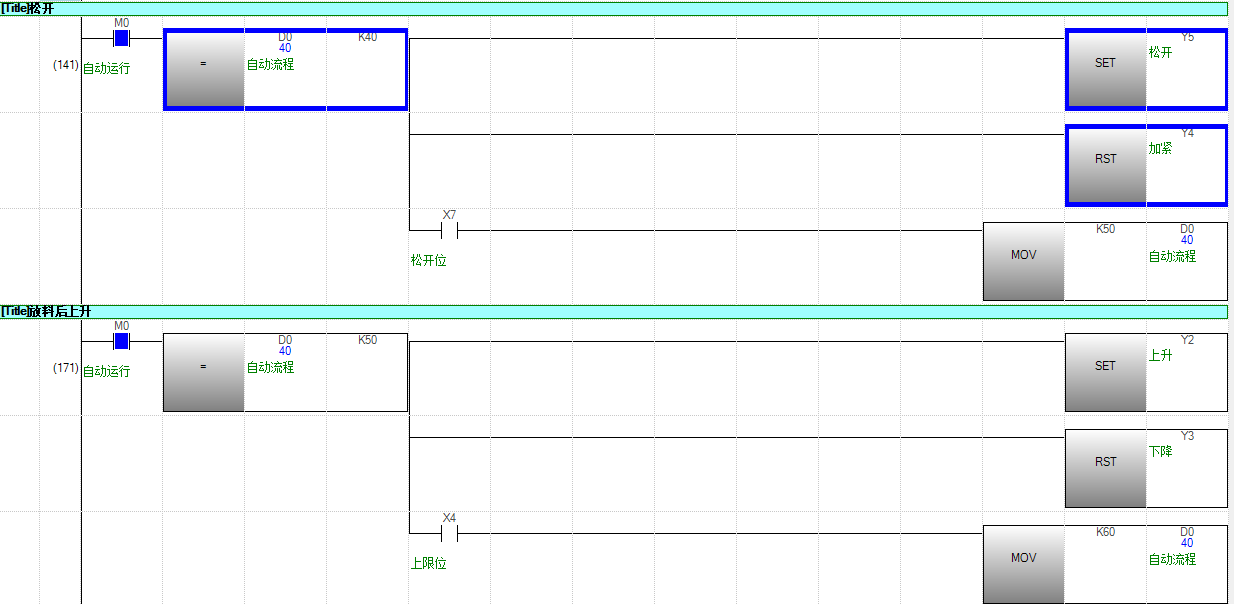
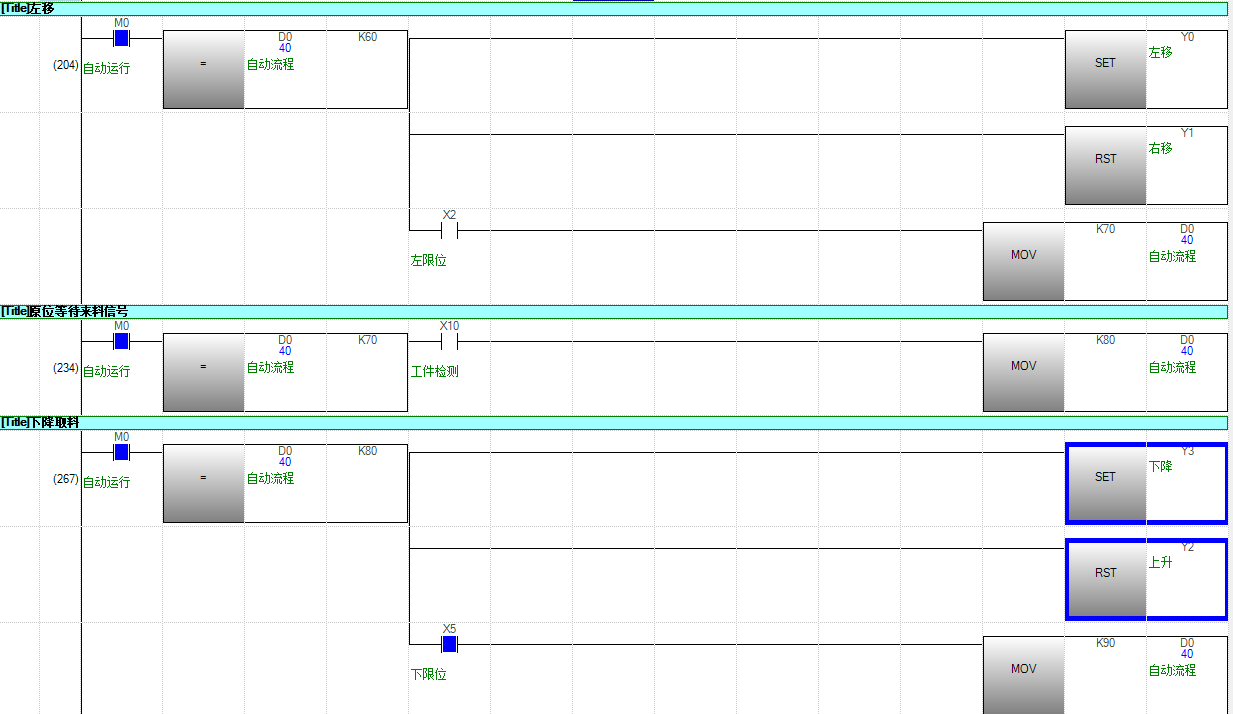

看了以上的图文讲解,相信大部分人已经明白了这节课讲述的知识点了,但是估计很多小白最关心的还是怎么在电脑软中写程序吧!那就上最直接的干货,手把手教大家从0基础学习三菱PLC编程软件的操作,注意哦!是真正的0基础教学,请大家认真看完下面几个视频,保证你能**听的懂!学得会!让你知其然还要知其所以然! **点击视频右下角全屏播放效果更佳。
 苏州佳途信息科技有限公司成立于2015年初,位于苏州工业园区独墅湖畔,股东背景雄厚,先后获得了中路股份(股票代码:600818)、帮实科技(股票代码:872038)厚石资本、江山恒创等多家上市公司及地方国资委创投基金投资入股。**公司下设“佳途机器人学院”,专门从事工业机器人及自动化领域的技能培训,已成为国内较为领先的工业自动化人才专业培育机构。
苏州佳途信息科技有限公司成立于2015年初,位于苏州工业园区独墅湖畔,股东背景雄厚,先后获得了中路股份(股票代码:600818)、帮实科技(股票代码:872038)厚石资本、江山恒创等多家上市公司及地方国资委创投基金投资入股。**公司下设“佳途机器人学院”,专门从事工业机器人及自动化领域的技能培训,已成为国内较为领先的工业自动化人才专业培育机构。

若有收获,就点个赞吧
0 人点赞
