事务
严格意义上事务的实现应该是ACID
- 原子性(Atomicity),可以理解为一个事务内的所有操作要么都执行,要么都不执行。
- 一致性(Consistency),可以理解为数据是满足完整性约束的,也就是不会存在中间状态的数据
- 隔离性(Isolation),指的是多个事务并发执行的时候不会互相干扰,即一个事务内部的数据对于其他事务来说是隔离的。
- 持久性(Durability),指的是一个事务完成了之后数据就被永远保存下来,之后的其他操作或故障都不会对事务的结果产生影响。
通俗意义上事务就是为了使得一些更新操作要么都成功,要么都失败。
分布式事务
分布式事务顾名思义就是要在分布式系统中实现事务,它其实是由多个本地事务组合而成。
2PC
2PC(Two-phase commit protocol),中文叫二阶段提交。 二阶段提交是一种强一致性设计,2PC 引入一个事务协调者的角色来协调管理各参与者(也可称之为各本地资源)的提交和回滚,二阶段分别指的是准备(投票)和提交两个阶段。
- 准备阶段:
协调者会给各参与者发送准备命令,同步等待所有资源的响应。(除了提交事务之外啥事都做完了)
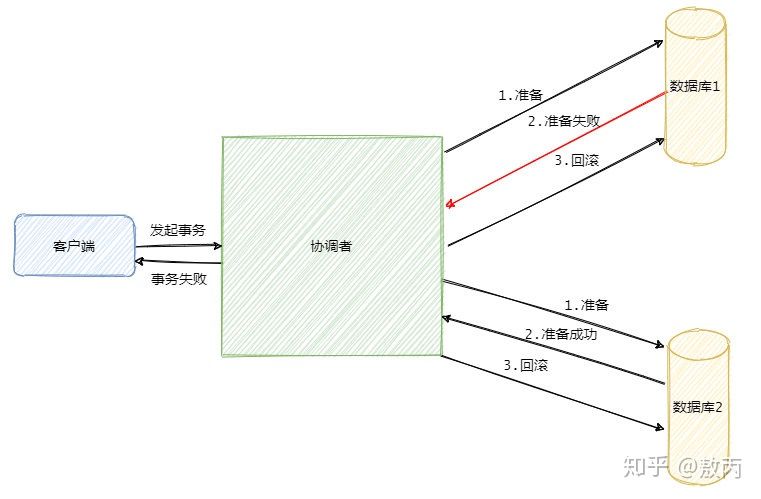
假如提交阶段有一个参与者返回失败,那么协调者就会向所有参与者发送提交回滚事务的请求(第二阶段),即分布式事务执行失败。
- 提交阶段:
协调者则向所有参与者发送提交事务(或回滚)命令,然后等待所有事务都提交成功之后,返回事务执行成功。
假如提交阶段提交失败,则不断重试,直到事务提交成功或回滚成功。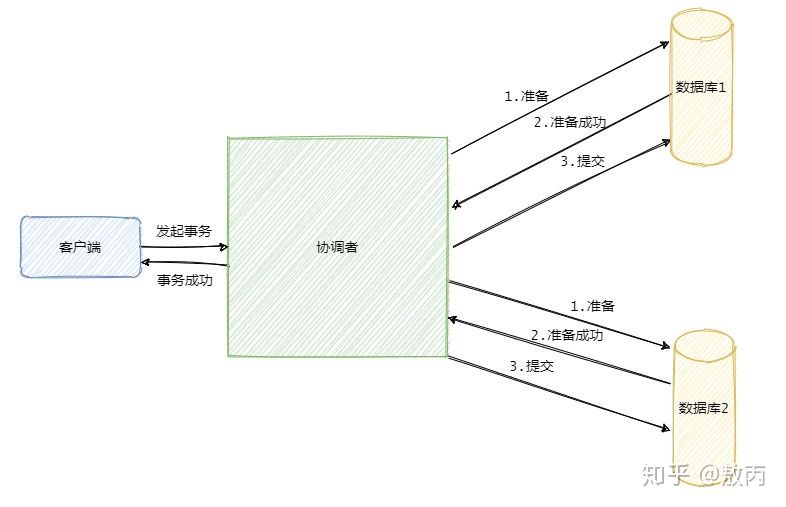
特点
2PC是一个同步阻塞协议,像第一阶段协调者会等待所有参与者响应才会进行下一步操作,当然第一阶段的协调者有超时机制,假设因为网络原因没有收到某参与者的响应或某参与者挂了,那么超时后就会判断事务失败,向所有参与者发送回滚命令。
协调者故障分析
- 协调者是一个单点,存在单点故障问题
- 假设协调者在发送准备命令之前挂了,还行等于事务还没开始。
- 假设协调者在发送准备命令之后挂了,这就不太行了,有些参与者等于都执行了处于事务资源锁定的状态。不仅事务执行不下去,还会因为锁定了一些公共资源而阻塞系统其它操作。
- 假设协调者在发送提交(回滚)事务命令之前挂了,那么事务也是执行不下去,且在第一阶段那些准备成功参与者都阻塞着。
- 假设协调者在发送提交(回滚)事务命令之后挂了,这个还行,至少命令发出去了,很大的概率都会回滚成功,资源都会释放。但是如果出现网络分区问题,某些参与者将因为收不到命令而阻塞着。
- 协调者故障,通过选举得到新协调者
因为协调者单点问题,因此我们可以通过选举等操作选出一个新协调者来顶替。
如果处于第一阶段,其实影响不大都回滚好了,在第一阶段事务肯定还没提交。
如果处于第二阶段,假设参与者都没挂,此时新协调者可以向所有参与者确认它们自身情况来推断下一步的操作。
每个参与者自身的状态只有自己和协调者知道,因此新协调者无法通过在场的参与者的状态推断出挂了的参与者是什么情况。极端情况下还是无法避免数据不一致问题!
总结
2PC 是一种尽量保证强一致性的分布式事务,因此它是同步阻塞的,而同步阻塞就导致长久的资源锁定问题,总体而言效率低,并且存在单点故障问题,在极端条件下存在数据不一致的风险。
3PC
3PC 的出现是为了解决 2PC 的一些问题,相比于 2PC 它在参与者中也引入了超时机制,并且新增了一个阶段使得参与者可以利用这一个阶段统一各自的状态。3PC 包含了三个阶段,分别是准备阶段、预提交阶段和提交阶段,对应的英文就是:CanCommit、PreCommit 和 DoCommit。
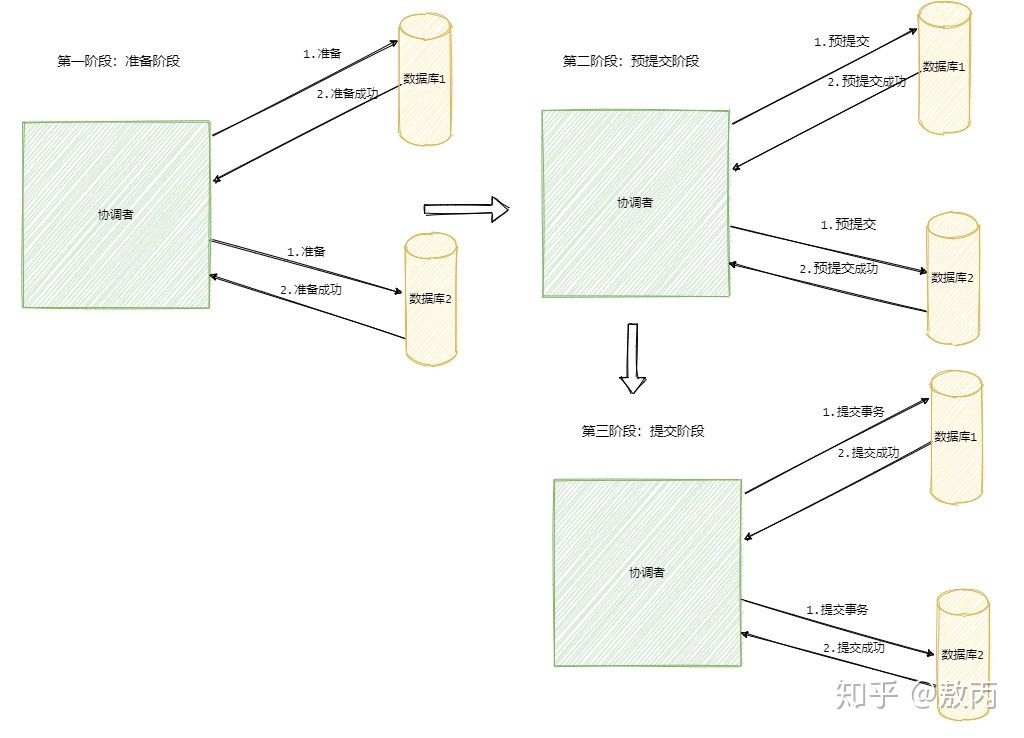
不管哪一个阶段有参与者返回失败都会宣布事务失败,这和 2PC 是一样的(当然到最后的提交阶段和 2PC 一样只要是提交请求就只能不断重试)。
与2PC的区别
- 准备阶段的变更成不会直接执行事务,而是会先去询问此时的参与者是否有条件接这个事务,因此不会一来就干活直接锁资源,使得在某些资源不可用的情况下所有参与者都阻塞着。
预提交阶段的引入起到了一个统一状态的作用,它像一道栅栏,表明在预提交阶段前所有参与者其实还未都回应,在预处理阶段表明所有参与者都已经回应了。
假如你是一位参与者,你知道自己进入了预提交状态那你就可以推断出来其他参与者也都进入了预提交状态。
多引入一个阶段也多一个交互,因此性能会差一些,而且绝大部分的情况下资源应该都是可用的,这样等于每次明知可用执行还得询问一次。
- 如果是等待提交命令超时,那么参与者就会提交事务了,因为都到了这一阶段了大概率是提交的,如果是等待预提交命令超时,那该干啥就干啥了,反正本来啥也没干。
- 超时机制也会带来数据不一致的问题,比如在等待提交命令时候超时了,参与者默认执行的是提交事务操作,但是有可能执行的是回滚操作,这样一来数据就不一致了。
总结
3PC 相对于 2PC 做了一定的改进:引入了参与者超时机制,并且增加了预提交阶段使得故障恢复之后协调者的决策复杂度降低,但整体的交互过程更长了,性能有所下降,并且还是会存在数据不一致问题。
2PC 和 3PC 都不能保证数据100%一致,因此一般都需要有定时扫描补偿机制。
TCC
2PC 和 3PC 都是数据库层面的,而 TCC 是业务层面的分布式事务。TCC 指的是Try - Confirm - Cancel。
- Try 指的是预留,即资源的预留和锁定,注意是预留。
- Confirm 指的是确认操作,这一步其实就是真正的执行了。
- Cancel 指的是撤销操作,可以理解为把预留阶段的动作撤销了。
其实从思想上看和 2PC 差不多,都是先试探性的执行,如果都可以那就真正的执行,如果不行就回滚。
比如说一个事务要执行A、B、C三个操作,那么先对三个操作执行预留动作。如果都预留成功了那么就执行确认操作,如果有一个预留失败那就都执行撤销动作。
我们来看下流程,TCC模型还有个事务管理者的角色,用来记录TCC全局事务状态并提交或者回滚事务。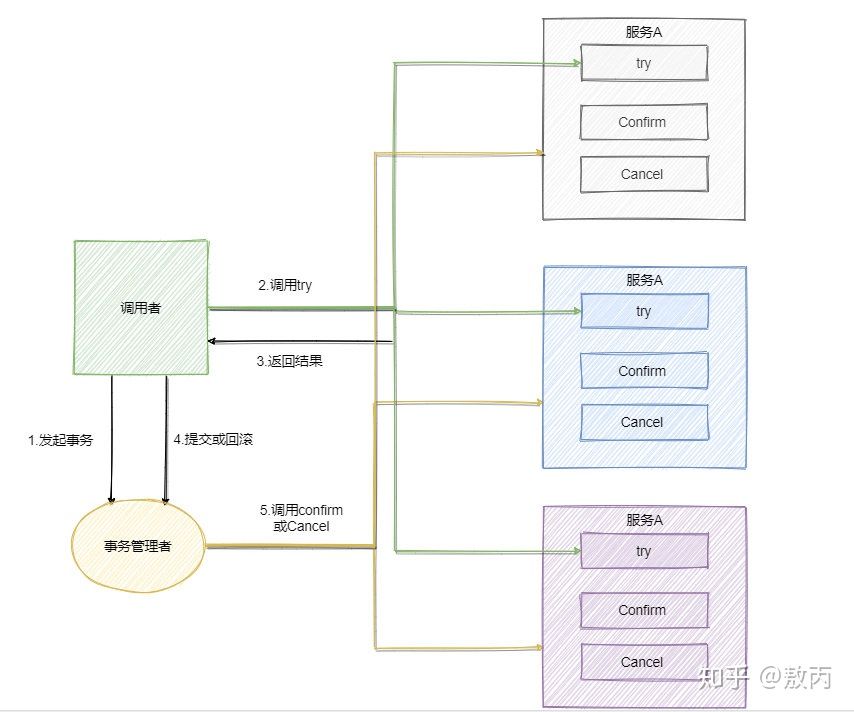
TCC 对业务的侵入较大和业务紧耦合,需要根据特定的场景和业务逻辑来设计相应的操作。
撤销和确认操作的执行可能需要重试,因此还需要保证操作的幂等
**
本地消息表
本地消息表其实就是利用了 各系统本地的事务来实现分布式事务。
本地消息表顾名思义就是会有一张存放本地消息的表,一般都是放在数据库中,然后在执行业务的时候 将业务的执行和将消息放入消息表中的操作放在同一个事务中,这样就能保证消息放入本地表中业务肯定是执行成功的。
然后再去调用下一个操作,如果下一个操作调用成功了好说,消息表的消息状态可以直接改成已成功。
如果调用失败也没事,会有 后台任务定时去读取本地消息表,筛选出还未成功的消息再调用对应的服务,服务更新成功了再变更消息的状态。
消息事务
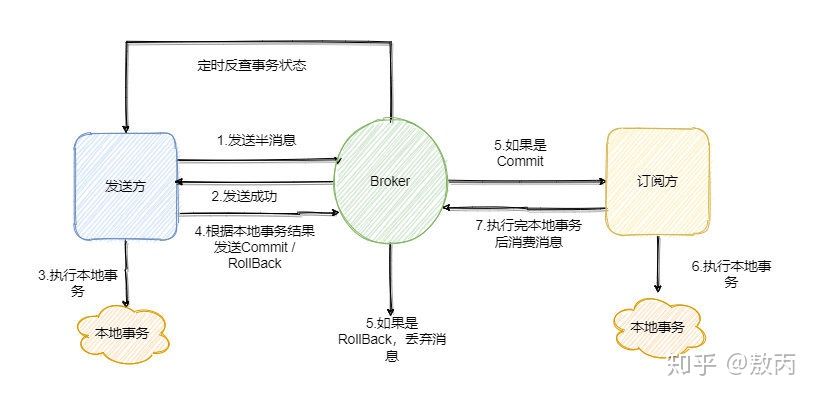
RocketMQ 就很好的支持了消息事务:
- 先给 Broker 发送事务消息即半消息,半消息不是说一半消息,而是这个消息对消费者来说不可见,然后发送成功后发送方再执行本地事务。
- 本地事务的结果向 Broker 发送 Commit 或者 RollBack 命令。
- RocketMQ 的发送方会提供一个反查事务状态接口,如果一段时间内半消息没有收到任何操作请求,那么 Broker 会通过反查接口得知发送方事务是否执行成功,然后执行 Commit 或者 RollBack 命令。
- 如果是 Commit 那么订阅方就能收到这条消息,然后再做对应的操作,做完了之后再消费这条消息即可。
- 如果是 RollBack 那么订阅方收不到这条消息,等于事务就没执行过。
总结
可以看出 2PC 和 3PC 是一种强一致性事务,不过还是有数据不一致,阻塞等风险,而且只能用在数据库层面。
而 TCC 是一种补偿性事务思想,适用的范围更广,在业务层面实现,因此对业务的侵入性较大,每一个操作都需要实现对应的三个方法。
本地消息、事务消息和最大努力通知其实都是最终一致性事务,因此适用于一些对时间不敏感的业务。
相关链接

若有收获,就点个赞吧
0 人点赞
