机器人分类
目前,世界上已经有了上万种机器人。这些形状各异、功能不同、种类众多的机器人,根据分类方法的不同,可以分成不同的类别,而且有着不同的认识
1. 分代
Ⅰ-示教再现型机器人 Teach-in and playback
人预先给出(示教)机器人的运动轨迹,然后机器人准确地重复再现这种轨迹。
Ⅱ-感觉判断型机器人 感知融合智能机器人
Ⅲ-自主感知型机器人 自主感知思维智能机器人**
具有自动性与应变性——它可以实时地采集外界不断变化的信息,并且可以自行变更其本身的运行情况。
按替代人的器官类型分类
操作机器人(手—— manipulator)
移动机器人(腿—— locomotive robot)
视觉机器人(眼—— visual robot)与对环境自主程度相关

按其构成机构的不同分类
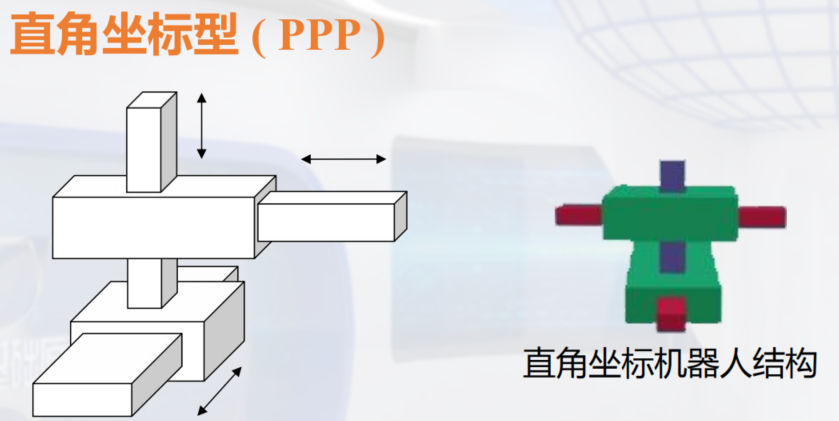
直角坐标机器人 Cartesian coordinate
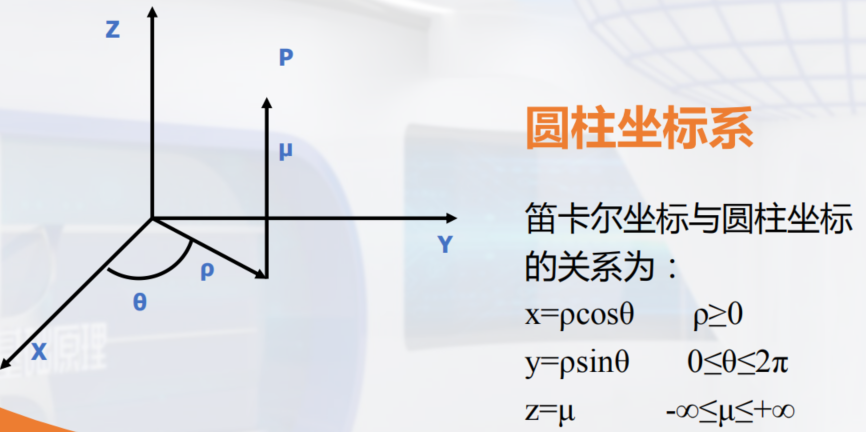
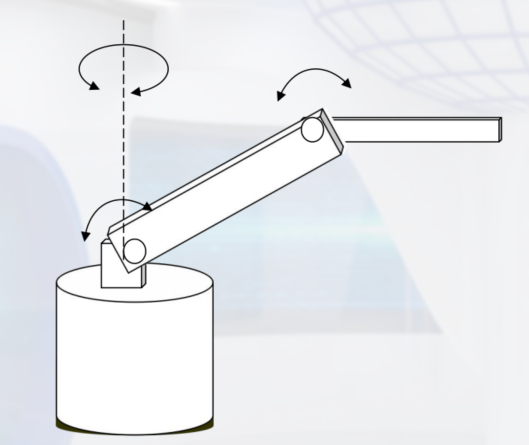
圆柱坐标机器人 Cylindrical coordinate
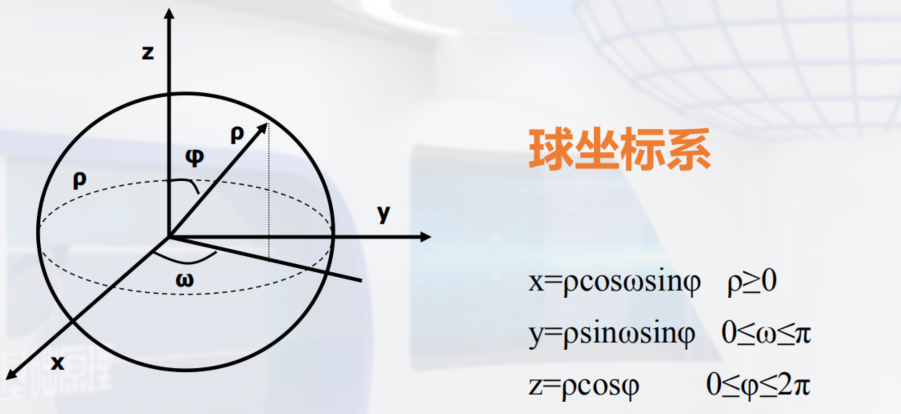
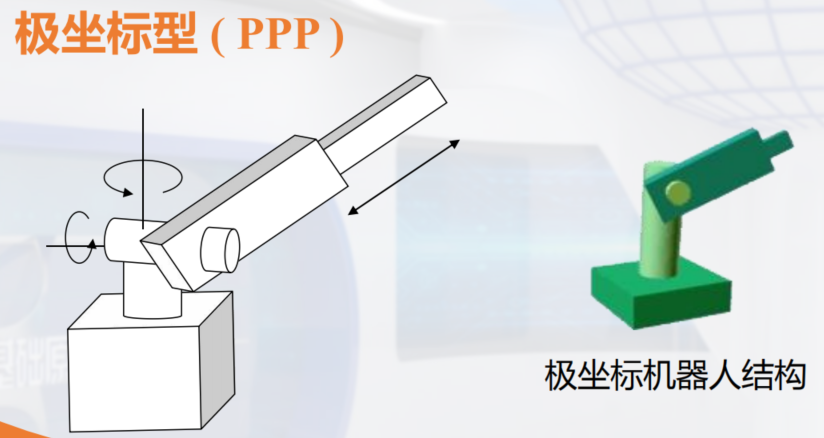
极坐标机器人 Polar coordinate
多关节型机器人 Articulated robot
并联关节机器人 Parallel linked robot
串并联关节机器人 Hybrid linked robot按其驱动方式的不同分类
液压机器人 Hydraulic robot
气动机器人 Pneumatic robot
电动机器人 Electrical robot按机器人用途进行分类
工业机器人:搬运、制造、装配、焊接、喷漆、铸造、码垛、井下、…
农业机器人:采摘、嫁接
水下机器人:水下6000米无缆自治机器人、 参观“ 泰坦尼克号”的阿尔文号载人潜水艇 。
极限作业机器人:核反应堆 、空间机器人
军用机器人:无人飞机U-2、机器人部队、海湾战争先锋号无人机与密苏里号战舰
排险救灾:排雷、除匪、爆炸物处理
娱乐机器人:迎宾小姐、智能宠物、AIBO、电影
医用机器人:微型机器人——肠内窥镜、血管疏通、脑外科手术、微驱动系统——DNA坐标系



若有收获,就点个赞吧
0 人点赞
