



关节的分类
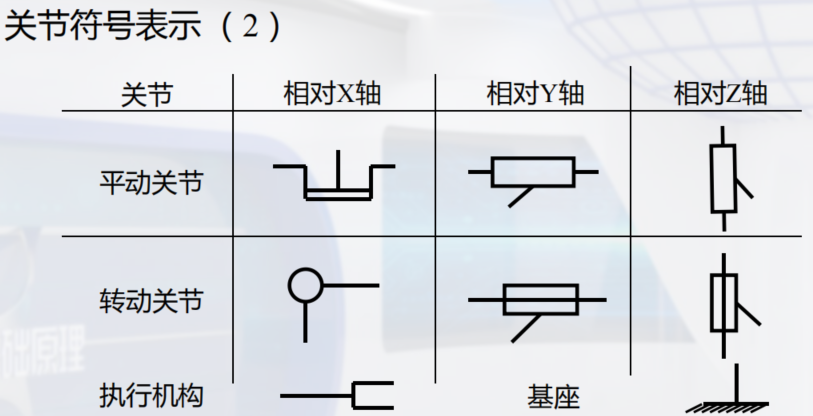
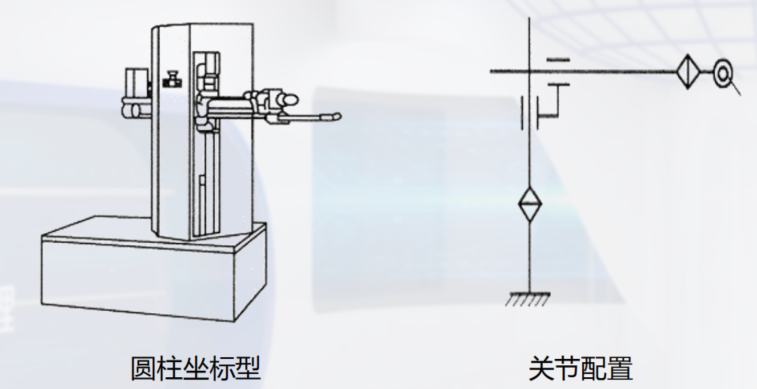
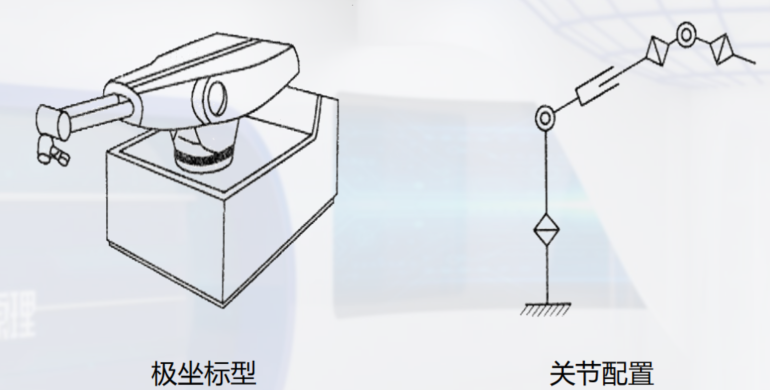
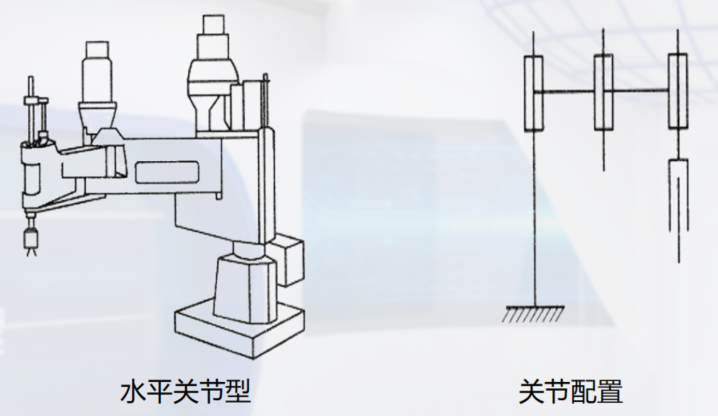
(1)平动(/移动)关节:就是(P-prismatic joint)移动副,允许连杆作直线移动
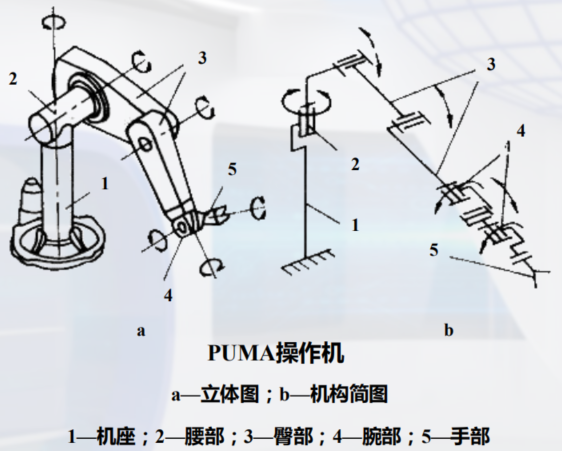
(2)转动关节:就是(R-revolute joint )转动副,允许连杆作旋转运动。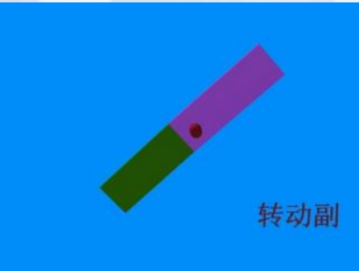


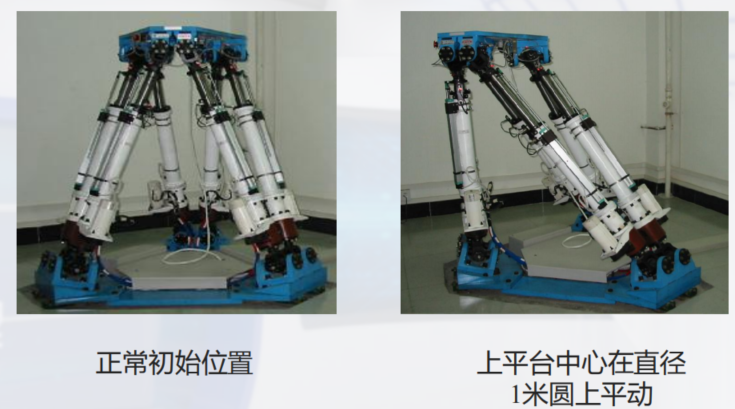
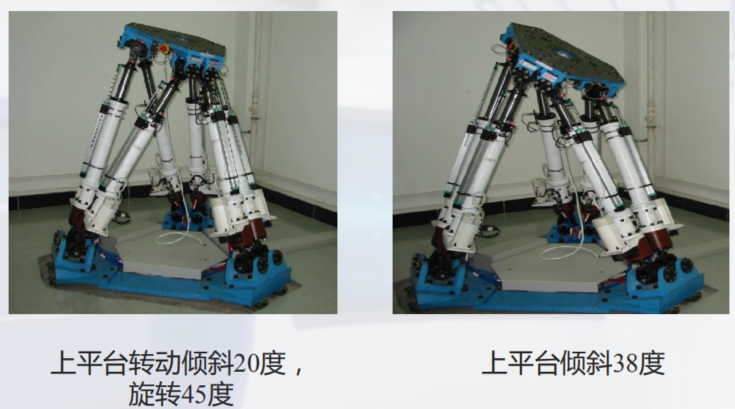
并联关节型机器人特点
1. 刚性好,结构稳定,承载能力高:用6根杆支撑末端件平台;
2 运动精度高:串联型机器人末端件上的误差是各个关节误差的积累和放大,并联型的误差没有积累和放大
关系;
3 串联型机器人正解容易,反解十分困难,并联型正解困难,反解十分容易;而机器人的在线实时计算是要计算反解的,所以,并联型容易实现;
4 并联型活动空间小
结构有关的性能指标
(1)机器人的工作范围(work space):
又叫工作空间,指机器人手臂或末端操作器安装点所能达到的所有空间区域,但不包括末端操作器本身所能达到的区域。是机器人的主要技术参数之一。
(2)刚度(stiffness):
机械零件和构件抵抗变形的能力。在弹性范围内,刚度是零件载荷与位移成正比的比例系数,即引起单位位移所需的力。
(3)强度(strength):
材料、机械零件和构件抵抗外力而不失效的能力。强度包括材料强度和结构强度两方面。强度问题有狭义和广义两种涵义。狭义的强度问题指各种断裂和塑性变形过大的问题。广义的强度问题包括强度、刚度和稳定性问题,有时还包括机械振动问题。材料强度指材料在不同影响因素下的各种力学性能指标。影响因素包括材料的化学成分、加工工艺、热处理制度、应力状态,载荷性质、加载速率、温度和介质等。
(4)定位精度(position accuracy) :
是一个位置量相对于其参考系的绝对度量,指机器人末端件实际到达位置与所需要到达的理想位置之间的差距。
(5)重复精度(repeatability) :
指在相同的运动位置指令下,机器人连续重复运动若干次,其位置之间的误差度量
(6)分辨率(resolution) :
指机器人可运动的最小步距。
(7)工作循环时间:
指机器人手臂执行某项专门的操作或任务所需要的时间
(8)死点(dead point):
在曲柄摇杆机构中,若以摇杆为主动件,则当曲柄和连杆处于一直线位置时,连杆传给曲柄
的力不能产生使曲柄回转的力矩,以致机构不能起动,这个位置称为死点。机构在起动时应避开死点位置,而在运
动过程中则常利用惯性来过渡死点。
(9)承载能力(payload) :
说明机器人搬运重物的能力。它取决于构件尺寸和驱动器的容量,还与机器人的运行速度有关。
(10)速度(velocity):
指机器人的末端件运行的最大速度。

若有收获,就点个赞吧
0 人点赞
