1.连接控制器
用数据线将机器人控制器与电脑连接,点击控制器点主界面的“下载程序”进入下载调试模式,这时电脑会弹出一个以控制器命名的磁盘(初次使用时这个过程可能需要1-3分钟)。
:::info
什么是下载调试模式?
处在下载调试模式时,控制器会进入一个类U盘的功能。下载时软件会把生成文件拷贝到这个磁盘中,类似U盘复制文件操作。
:::


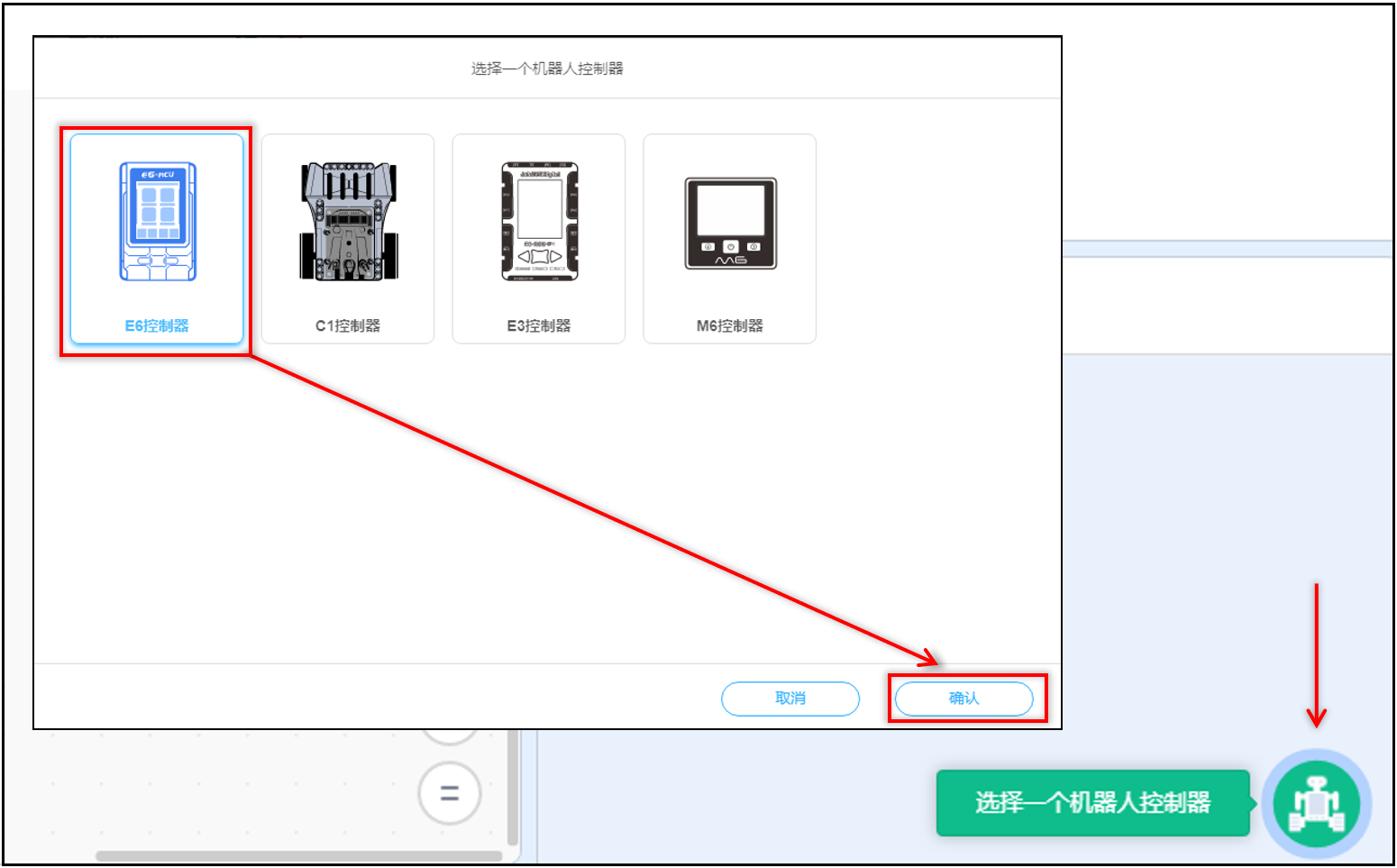
2.选择控制器类型(选做)
初次使用软件时,需要选择控制器的型号。在软件右下方找到机器人图标,选择对应控制器类型。
:::info
不同控制器编程块会有不同不能共用,所以必须先选择对应类型再进行编程。
:::
3.编写程序
拖动需要的编程块到编程区。需要注意的是程序的起始块必须是“控制器”类的“控制器任务1”。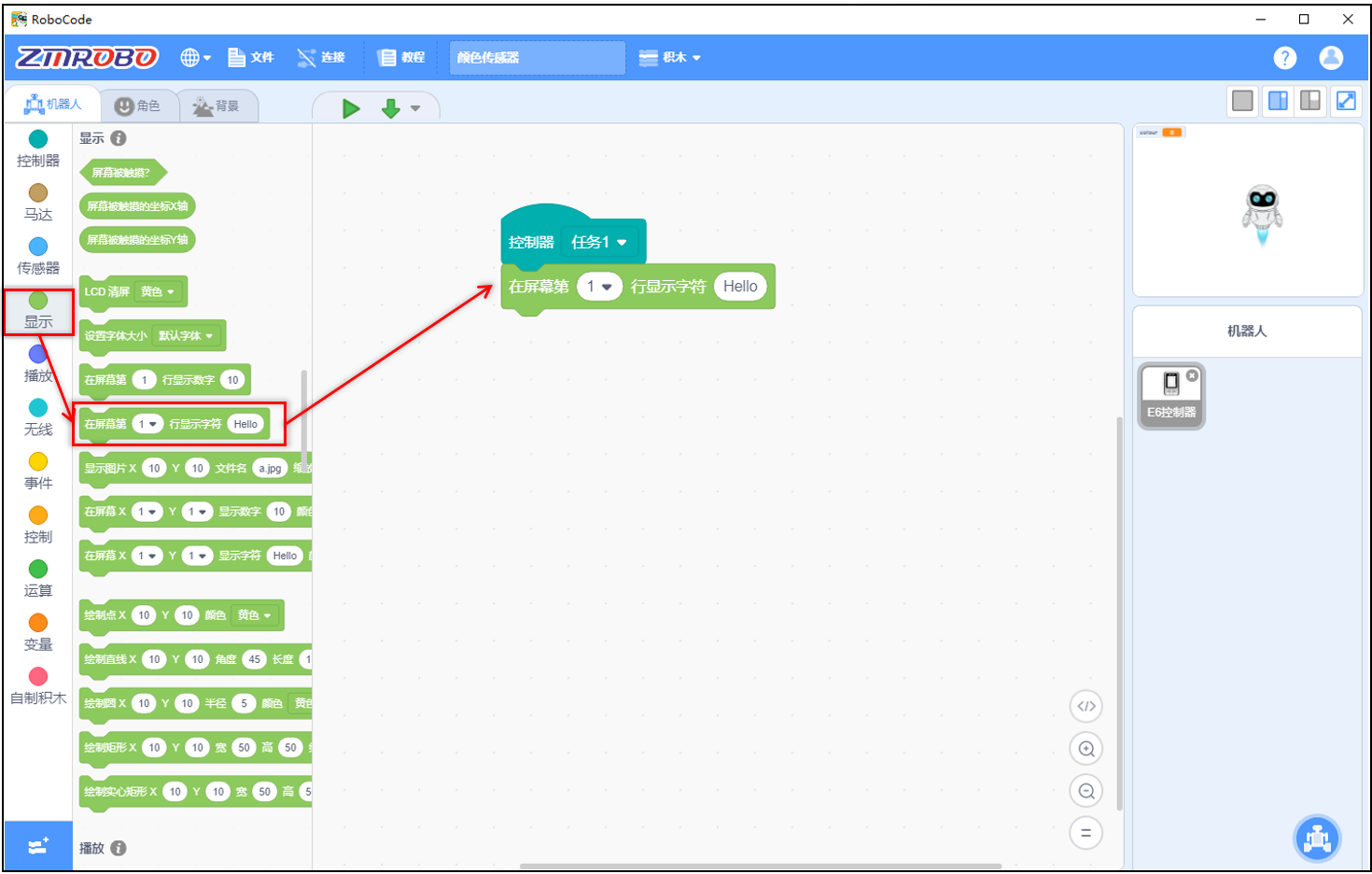
4.下载程序
 :::danger
下载失败:请查看控制器是否进入下载模式。(按下控制器界面上的“下载程序”图标)
:::danger
下载失败:请查看控制器是否进入下载模式。(按下控制器界面上的“下载程序”图标)
运行后无程序效果不符:检查程序设置端口和实际传感器对应端口是否匹配。(如程序设置端口为P1,传感器同样需接在P1口才能使用)
:::
5.运行程序
控制器点击“运行xx”运行程序。

若有收获,就点个赞吧
0 人点赞
