众所周知 synchronized 锁在 Java 中经常使用它的源码是 C++ 实现的,它的实现原理是怎样的呢?本文以 OpenJDK 8 为例探究以下内容。
当线程访问同步块时首先需要获得锁并把相关信息存储在对象头中。所以 wait、notify、notifyAll 这些方法为什么被设计在 Object 中或许你已经找到答案了。
Hotspot 有两种对象头:
- 数组类型,使用
arrayOopDesc来描述对象头 - 其它,使用
instanceOopDesc来描述对象头
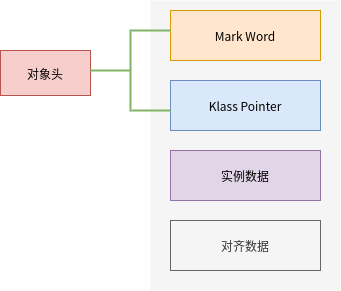
对象头由两部分组成
- Mark Word:存储自身的运行时数据,例如 HashCode、GC 年龄、锁相关信息等内容。
- Klass Pointer:类型指针指向它的类元数据的指针。
64 位虚拟机 Mark Word 是 64bit 其结构如下: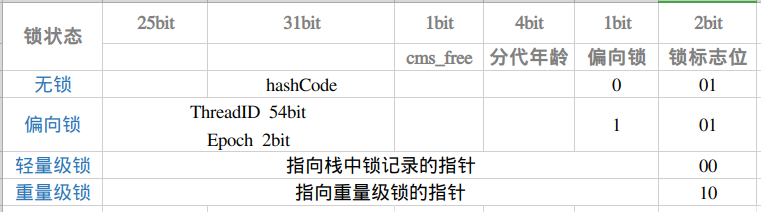
在 JDK 6 中虚拟机团队对锁进行了重要改进,优化了其性能引入了 偏向锁、轻量级锁、适应性自旋、锁消除、锁粗化等实现,其中 锁消除和锁粗化本文不做详细讨论其余内容我们将对其进行逐一探究。
总体上来说锁状态升级流程如下:
偏向锁
流程
当线程访问同步块并获取锁时处理流程如下:
- 检查
mark word的线程 id。 - 如果为空则设置 CAS 替换当前线程 id。如果替换成功则获取锁成功,如果失败则撤销偏向锁。
- 如果不为空则检查
线程 id为是否为本线程。如果是则获取锁成功,如果失败则撤销偏向锁。
持有偏向锁的线程以后每次进入这个锁相关的同步块时,只需比对一下 mark word 的线程 id 是否为本线程,如果是则获取锁成功。
如果发生线程竞争发生 2、3 步失败的情况则需要撤销偏向锁。
偏向锁的撤销
- 偏向锁的撤销动作必须等待全局安全点
- 暂停拥有偏向锁的线程,判断锁对象是否处于被锁定状态
撤销偏向锁恢复到无锁(标志位为 01)或轻量级锁(标志位为 00)的状态
优点
只有一个线程执行同步块时进一步提高性能,适用于一个线程反复获得同一锁的情况。偏向锁可以提高带有同步但无竞争的程序性能。
缺点
轻量级锁
加锁
多个线程竞争偏向锁导致偏向锁升级为轻量级锁
JVM 在当前线程的栈帧中创建 Lock Reocrd,并将对象头中的 Mark Word 复制到 Lock Reocrd 中。(Displaced Mark Word)
线程尝试使用 CAS 将对象头中的 Mark Word 替换为指向 Lock Reocrd 的指针。如果成功则获得锁,如果失败则先检查对象的 Mark Word 是否指向当前线程的栈帧如果是则说明已经获取锁,否则说明其它线程竞争锁则膨胀为重量级锁。
解锁
使用 CAS 操作将 Mark Word 还原
- 如果第 1 步执行成功则释放完成
- 如果第 1 步执行失败则膨胀为重量级锁。
优点
其性能提升的依据是对于绝大部分的锁在整个生命周期内都是不会存在竞争。在多线程交替执行同步块的情况下,可以避免重量级锁引起的性能消耗。缺点
在有多线程竞争的情况下轻量级锁增加了额外开销。自旋锁
自旋是一种获取锁的机制并不是一个锁状态。在膨胀为重量级锁的过程中或重入时会多次尝试自旋获取锁以避免线程唤醒的开销,但是它会占用 CPU 的时间因此如果同步代码块执行时间很短自旋等待的效果就很好,反之则浪费了 CPU 资源。默认情况下自旋次数是 10 次用户可以使用参数-XX : PreBlockSpin来更改。那么如何优化来避免此情况发生呢?我们来看适应性自旋。适应性自旋锁
JDK 6 引入了自适应自旋锁,意味着自旋的次数不在固定,而是由前一次在同一个锁上的自旋时间及锁的拥有者的状态来决定。如果对于某个锁很少自旋成功那么以后有可能省略掉自旋过程以避免资源浪费。有了自适应自旋随着程序运行和性能监控信息的不断完善,虚拟机对程序锁的状况预测就会越来越准确,虛拟机就会变得越来越“聪明”了。优点
竞争的线程不会阻塞挂起,提高了程序响应速度。避免重量级锁引起的性能消耗。缺点
如果线程始终无法获取锁,自旋消耗 CPU 最终会膨胀为重量级锁。重量级锁
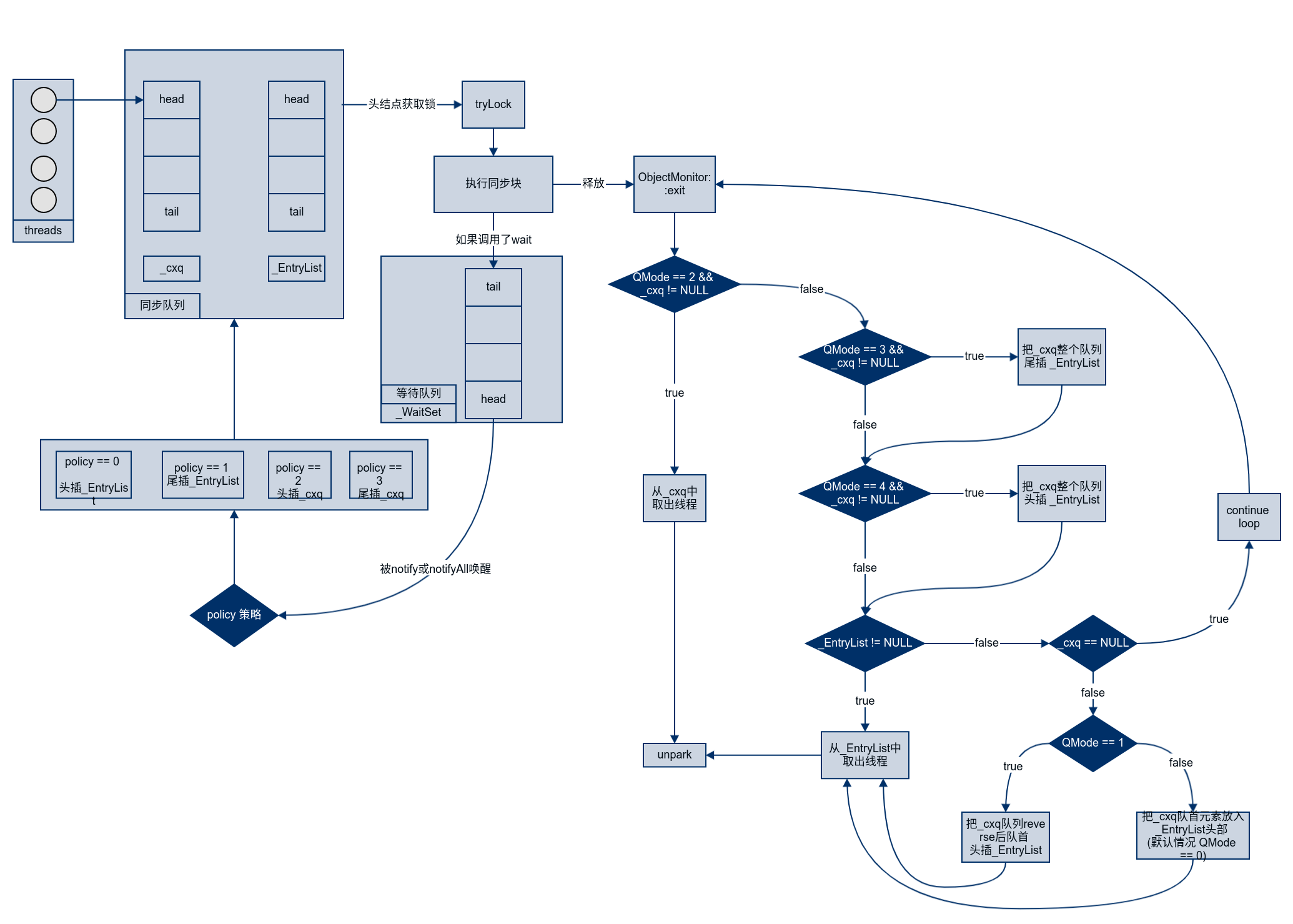
在重量级锁中没有竞争到锁的对象会 park 被挂起,退出同步块时 unpark 唤醒后续线程。唤醒操作涉及到操作系统调度会有额外的开销。ObjectMonitor中包含一个同步队列(由_cxq和_EntryList组成)一个等待队列(_WaitSet)。
- 被
notify或notifyAll唤醒时根据policy策略选择加入的队列(policy 默认为 0) - 退出同步块时根据
QMode策略来唤醒下一个线程(QMode 默认为 0)
这里稍微提及一下管程这个概念。synchronized 关键字及 wait、notify、notifyAll 这三个方法都是管程的组成部分。可以说管程就是一把解决并发问题的万能钥匙。有两大核心问题管程都是能够解决的:
- 互斥:即同一时刻只允许一个线程访问共享资源;
- 同步:即线程之间如何通信、协作。
synchronized 的 monitor锁机制和 JDK 并发包中的 AQS 是很相似的,只不过 AQS 中是一个同步队列多个等待队列。熟悉 AQS 的同学可以拿来做个对比。
队列协作流程图
源码分析
在 HotSpot 中 monitor 是由 ObjectMonitor 实现的。其源码是用 c++来实现的源文件是 ObjectMonitor.hpp 主要数据结构如下所示:
| ``` 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19
|
ObjectMonitor() { _header = NULL; _count = 0; _waiters = 0, // 等待中的线程数 _recursions = 0; // 线程重入次数 _object = NULL; // 存储该 monitor 的对象 _owner = NULL; // 指向拥有该 monitor 的线程 _WaitSet = NULL; // 等待线程 双向循环链表_WaitSet 指向第一个节点 _WaitSetLock = 0 ; _Responsible = NULL ; _succ = NULL ; _cxq = NULL ; // 多线程竞争锁时的单向链表 FreeNext = NULL ; _EntryList = NULL ; // _owner 从该双向循环链表中唤醒线程, _SpinFreq = 0 ; _SpinClock = 0 ; OwnerIsThread = 0 ; _previous_owner_tid = 0; // 前一个拥有此监视器的线程 ID }
|| --- | --- |> 1. _owner:初始时为 NULL。当有线程占有该 monitor 时 owner 标记为该线程的 ID。当线程释放 monitor 时 owner 恢复为 NULL。owner 是一个临界资源 JVM 是通过 CAS 操作来保证其线程安全的。> 2. _cxq:竞争队列所有请求锁的线程首先会被放在这个队列中(单向)。_cxq 是一个临界资源 JVM 通过 CAS 原子指令来修改_cxq 队列。<br />每当有新来的节点入队,它的 next 指针总是指向之前队列的头节点,而_cxq 指针会指向该新入队的节点,所以是后来居上。> 3. _EntryList: _cxq 队列中有资格成为候选资源的线程会被移动到该队列中。> 4. _WaitSet: 等待队列因为调用 wait 方法而被阻塞的线程会被放在该队列中。<a name="FebDB"></a>### monitor 竞争过程> 1. 通过 CAS 尝试把 monitor 的 owner 字段设置为当前线程。> 2. 如果设置之前的 owner 指向当前线程,说明当前线程再次进入 monitor,即重入锁执行 recursions ++ , 记录重入的次数。> 3. 如果当前线程是第一次进入该 monitor, 设置 recursions 为 1,_owner 为当前线程,该线程成功获得锁并返回。> 4. 如果获取锁失败,则等待锁的释放。执行 `monitorenter` 指令时 调用以下代码|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23
|
IRT_ENTRY_NO_ASYNC(void, InterpreterRuntime::monitorenter(JavaThread thread, BasicObjectLock elem))
ifdef ASSERT
thread->last_frame().interpreter_frame_verify_monitor(elem);
endif
if (PrintBiasedLockingStatistics) { Atomic::inc(BiasedLocking::slow_path_entry_count_addr()); } Handle h_obj(thread, elem->obj()); assert(Universe::heap()->is_in_reserved_or_null(h_obj()),”must be NULL or an object”); // 是否使用偏向锁 JVM 启动时设置的偏向锁-XX:-UseBiasedLocking=false/true if (UseBiasedLocking) { // Retry fast entry if bias is revoked to avoid unnecessary inflation ObjectSynchronizer::fast_enter(h_obj, elem->lock(), true, CHECK); } else { // 轻量级锁 ObjectSynchronizer::slow_enter(h_obj, elem->lock(), CHECK); } assert(Universe::heap()->is_in_reserved_or_null(elem->obj()), “must be NULL or an object”);
ifdef ASSERT
thread->last_frame().interpreter_frame_verify_monitor(elem);
endif
IRT_END
|| --- | --- |> `slow_enter` 方法主要是轻量级锁的一些操作,如果操作失败则会膨胀为重量级锁,过程前面已经描述比较清楚此处不在赘述。`enter` 方法则为重量级锁的入口源码如下|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43
|
void ATTR ObjectMonitor::enter(TRAPS) { Thread const Self = THREAD ; void cur ; // 省略部分代码
// 通过 CAS 操作尝试把 monitor 的_owner 字段设置为当前线程 cur = Atomic::cmpxchg_ptr (Self, &_owner, NULL) ; if (cur == NULL) { assert (_recursions == 0 , “invariant”) ; assert (_owner == Self, “invariant”) ; return ; } // 线程重入,recursions++ if (cur == Self) { _recursions ++ ; return ; } // 如果当前线程是第一次进入该 monitor, 设置_recursions 为 1,_owner 为当前线程 if (Self->is_lock_owned ((address)cur)) { assert (_recursions == 0, “internal state error”); _recursions = 1 ; _owner = Self ; OwnerIsThread = 1 ; return ; } for (;;) { jt->set_suspend_equivalent(); // 如果获取锁失败,则等待锁的释放; EnterI (THREAD) ; if (!ExitSuspendEquivalent(jt)) break ; _recursions = 0 ; _succ = NULL ; exit (false, Self) ; jt->java_suspend_self(); } Self->set_current_pending_monitor(NULL); } }
|| --- | --- |<a name="BDeHX"></a>### monitor 等待> 1. 当前线程被封装成 ObjectWaiter 对象 node,状态设置成 ObjectWaiter::TS_CXQ。> 2. for 循环通过 CAS 把 node 节点 push 到`_cxq`列表中,同一时刻可能有多个线程把自己的 node 节点 push 到`_cxq`列表中。> 3. node 节点 push 到_cxq 列表之后,通过自旋尝试获取锁,如果还是没有获取到锁则通过 park 将当前线程挂起等待被唤醒。> 4. 当该线程被唤醒时会从挂起的点继续执行,通过 ObjectMonitor::TryLock 尝试获取锁。|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73
|
// 省略部分代码 void ATTR ObjectMonitor::EnterI (TRAPS) { Thread Self = THREAD ; assert (Self->is_Java_thread(), “invariant”) ; assert (((JavaThread ) Self)->thread_state() == _thread_blocked , “invariant”) ; // Try lock 尝试获取锁 if (TryLock (Self) > 0) { assert (_succ != Self , “invariant”) ; assert (_owner == Self , “invariant”) ; assert (_Responsible != Self , “invariant”) ; // 如果获取成功则退出,避免 park unpark 系统调度的开销 return ; } // 自旋获取锁 if (TrySpin(Self) > 0) { assert (_owner == Self, “invariant”); assert (_succ != Self, “invariant”); assert (_Responsible != Self, “invariant”); return; } // 当前线程被封装成 ObjectWaiter 对象 node, 状态设置成 ObjectWaiter::TS_CXQ ObjectWaiter node(Self) ; Self->_ParkEvent->reset() ; node._prev = (ObjectWaiter ) 0xBAD ; node.TState = ObjectWaiter::TS_CXQ ; // 通过 CAS 把 node 节点 push 到_cxq 列表中 ObjectWaiter nxt ; for (;;) { node._next = nxt = _cxq ; if (Atomic::cmpxchg_ptr (&node, &_cxq, nxt) == nxt) break ; // 再次 tryLock if (TryLock (Self) > 0) { assert (_succ != Self , “invariant”) ; assert (_owner == Self , “invariant”) ; assert (_Responsible != Self , “invariant”) ; return ; } } for (;;) { // 本段代码的主要思想和 AQS 中相似可以类比来看 // 再次尝试 if (TryLock (Self) > 0) break ; assert (_owner != Self, “invariant”) ; if ((SyncFlags & 2) && _Responsible == NULL) { Atomic::cmpxchg_ptr (Self, &_Responsible, NULL) ; } // 满足条件则 park self if (_Responsible == Self || (SyncFlags & 1)) { TEVENT (Inflated enter - park TIMED) ; Self->_ParkEvent->park ((jlong) RecheckInterval) ; // Increase the RecheckInterval, but clamp the value. RecheckInterval *= 8 ; if (RecheckInterval > 1000) RecheckInterval = 1000 ; } else { TEVENT (Inflated enter - park UNTIMED) ; // 通过 park 将当前线程挂起,等待被唤醒 Self->_ParkEvent->park() ; } if (TryLock(Self) > 0) break ; // 再次尝试自旋 if ((Knob_SpinAfterFutile & 1) && TrySpin(Self) > 0) break; } return ; }
|| --- | --- |<a name="ks0D2"></a>### monitor 释放> 当某个持有锁的线程执行完同步代码块时,会释放锁并 `unpark` 后续线程(由于篇幅只保留重要代码)。|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133
|
void ATTR ObjectMonitor::exit(bool not_suspended, TRAPS) { Thread * Self = THREAD ;
if (_recursions != 0) { _recursions—; // this is simple recursive enter TEVENT (Inflated exit - recursive) ; return ; } ObjectWaiter w = NULL ; int QMode = Knob_QMode ; // 直接绕过 EntryList 队列,从 cxq 队列中获取线程用于竞争锁 if (QMode == 2 && _cxq != NULL) { w = _cxq ; assert (w != NULL, “invariant”) ; assert (w->TState == ObjectWaiter::TS_CXQ, “Invariant”) ; ExitEpilog (Self, w) ; return ; } // cxq 队列插入 EntryList 尾部 if (QMode == 3 && _cxq != NULL) { w = _cxq ; for (;;) { assert (w != NULL, “Invariant”) ; ObjectWaiter u = (ObjectWaiter ) Atomic::cmpxchg_ptr (NULL, &_cxq, w) ; if (u == w) break ; w = u ; } ObjectWaiter q = NULL ; ObjectWaiter p ; for (p = w ; p != NULL ; p = p->_next) { guarantee (p->TState == ObjectWaiter::TS_CXQ, “Invariant”) ; p->TState = ObjectWaiter::TS_ENTER ; p->_prev = q ; q = p ; } ObjectWaiter Tail ; for (Tail = _EntryList ; Tail != NULL && Tail->_next != NULL ; Tail = Tail->_next) ; if (Tail == NULL) { _EntryList = w ; } else { Tail->_next = w ; w->_prev = Tail ; } } // cxq 队列插入到_EntryList 头部 if (QMode == 4 && _cxq != NULL) { // 把 cxq 队列放入 EntryList // 此策略确保最近运行的线程位于 EntryList 的头部 w = _cxq ; for (;;) { assert (w != NULL, “Invariant”) ; ObjectWaiter u = (ObjectWaiter ) Atomic::cmpxchg_ptr (NULL, &_cxq, w) ; if (u == w) break ; w = u ; } assert (w != NULL , “invariant”) ; ObjectWaiter q = NULL ; ObjectWaiter p ; for (p = w ; p != NULL ; p = p->_next) { guarantee (p->TState == ObjectWaiter::TS_CXQ, “Invariant”) ; p->TState = ObjectWaiter::TS_ENTER ; p->_prev = q ; q = p ; } if (_EntryList != NULL) { q->_next = _EntryList ; _EntryList->_prev = q ; } _EntryList = w ; } w = _EntryList ; if (w != NULL) { assert (w->TState == ObjectWaiter::TS_ENTER, “invariant”) ; ExitEpilog (Self, w) ; return ; } w = _cxq ; if (w == NULL) continue ; for (;;) { assert (w != NULL, “Invariant”) ; ObjectWaiter u = (ObjectWaiter ) Atomic::cmpxchg_ptr (NULL, &_cxq, w) ; if (u == w) break ; w = u ; } if (QMode == 1) { // QMode == 1 : 把 cxq 倾倒入 EntryList 逆序 ObjectWaiter s = NULL ; ObjectWaiter t = w ; ObjectWaiter u = NULL ; while (t != NULL) { guarantee (t->TState == ObjectWaiter::TS_CXQ, “invariant”) ; t->TState = ObjectWaiter::TS_ENTER ; u = t->_next ; t->_prev = u ; t->_next = s ; s = t; t = u ; } _EntryList = s ; assert (s != NULL, “invariant”) ; } else { // QMode == 0 or QMode == 2 _EntryList = w ; ObjectWaiter q = NULL ; ObjectWaiter * p ; // 将单向链表构造成双向环形链表; for (p = w ; p != NULL ; p = p->_next) { guarantee (p->TState == ObjectWaiter::TS_CXQ, “Invariant”) ; p->TState = ObjectWaiter::TS_ENTER ; p->_prev = q ; q = p ; } } if (_succ != NULL) continue; w = _EntryList ; if (w != NULL) { guarantee (w->TState == ObjectWaiter::TS_ENTER, “invariant”) ; ExitEpilog (Self, w) ; return ; } } }
|| --- | --- |<a name="vjnMl"></a>### notify 唤醒> notify 或者 notifyAll 方法可以唤醒同一个锁监视器下调用 wait 挂起的线程,具体实现如下|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89
|
void ObjectMonitor::notify(TRAPS) { CHECK_OWNER(); if (_WaitSet == NULL) { TEVENT (Empty - Notify); return; } DTRACE_MONITOR_PROBE(notify, this, object(), THREAD); int Policy = Knob_MoveNotifyee; Thread::SpinAcquire(&_WaitSetLock, “WaitSet - notify”); ObjectWaiter iterator = DequeueWaiter(); if (iterator != NULL) { // 省略一些代码 // 头插 EntryList if (Policy == 0) { if (List == NULL) { iterator->_next = iterator->_prev = NULL; _EntryList = iterator; } else { List->_prev = iterator; iterator->_next = List; iterator->_prev = NULL; _EntryList = iterator; } } else if (Policy == 1) { // 尾插 EntryList if (List == NULL) { iterator->_next = iterator->_prev = NULL; _EntryList = iterator; } else { ObjectWaiter Tail; for (Tail = List; Tail->_next != NULL; Tail = Tail->_next); assert (Tail != NULL && Tail->_next == NULL, “invariant”); Tail->_next = iterator; iterator->_prev = Tail; iterator->_next = NULL; } } else if (Policy == 2) { // 头插 cxq // prepend to cxq if (List == NULL) { iterator->_next = iterator->_prev = NULL; _EntryList = iterator; } else { iterator->TState = ObjectWaiter::TS_CXQ; for (;;) { ObjectWaiter Front = _cxq; iterator->_next = Front; if (Atomic::cmpxchg_ptr(iterator, &_cxq, Front) == Front) { break; } } } } else if (Policy == 3) { // 尾插 cxq iterator->TState = ObjectWaiter::TS_CXQ; for (;;) { ObjectWaiter Tail; Tail = _cxq; if (Tail == NULL) { iterator->_next = NULL; if (Atomic::cmpxchg_ptr(iterator, &_cxq, NULL) == NULL) { break; } } else { while (Tail->_next != NULL) Tail = Tail->_next; Tail->_next = iterator; iterator->_prev = Tail; iterator->_next = NULL; break; } } } else { ParkEvent *ev = iterator->_event; iterator->TState = ObjectWaiter::TS_RUN; OrderAccess::fence(); ev->unpark(); } if (Policy < 4) { iterator->wait_reenter_begin(this); } } // 自旋释放 Thread::SpinRelease(&_WaitSetLock); if (iterator != NULL && ObjectMonitor::_sync_Notifications != NULL) { ObjectMonitor::_sync_Notifications->inc(); } } ``` | | —- | —- |
管程和信号量
信号量与管程都是操作系统的并发编程机制,也是现在很多高级语言实现并发的一种底层原理。
信号量(Semaphore)
信号量机制是由大名鼎鼎的荷兰计算机科学家 Dijkstra 于1965 年提出的
操作系统的并发编程模型中,信号量(Semaphore)与锁机制(Mutex)一样都是对底层硬件同步方法的高级抽象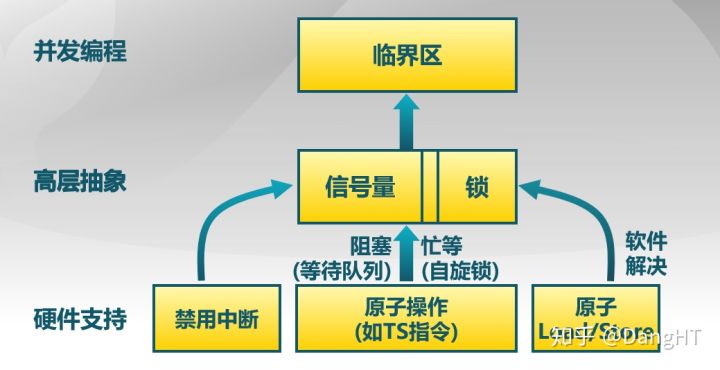
信号量的模型
信号量模型的组成是这样的:
- 两个成员变量:
- 整型数 count:用于记录共享资源数量
- 等待队列
- 两个基本方法:
- P() 操作:将 count - 1,若 count < 0 时,线程进入等待队列(Prolaag 荷兰语,尝试减少)
- V() 操作:将 count + 1,若 count <= 0 时,唤醒一个等待队列中的线程(Verhoog 荷兰语,增加)
对信号量模型需要注意以下几点:
- 初始化信号量时,我们指定 count 的值,之后 count 值的变化只能由 P() / V() 进行操作
- 由操作系统实现并保证 P() / V() 操作的原子性
- P() 操作是可能阻塞的,V() 操作不会阻塞
- P() / V() 操作必须成对出现
信号量机制相比于锁机制的一个主要区别是:信号量机制允许多个线程同时访问一个临界区
因为只要 count 符合条件,那么线程就可以访问临界区资源
信号量机制也存在一些缺点,那就是真正使用起来比较困难,因为当我们需要解决的同步问题越复杂,条件越多,那么需要的信号量就越多,需要更加谨慎地处理信号量之间的处理顺序否则很容易造成死锁现象。
管程(Monitor)
管程是一种在信号量机制上进行改进的并发编程模型。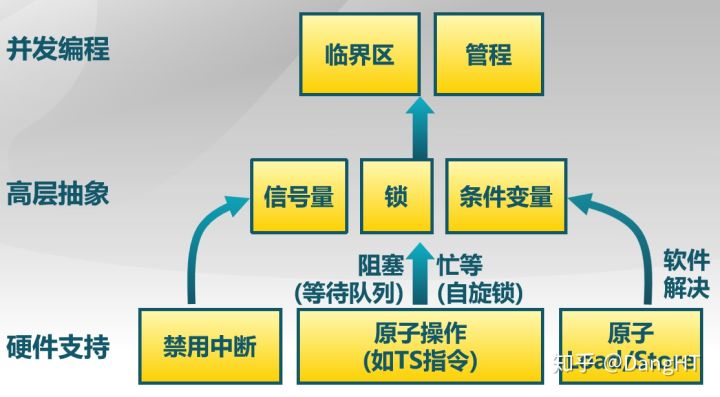
- 它采用了面向对象的思想封装了线程间的同步控制
- 在任意时刻最多允许一个线程执行管程代码
-
管程模型
管程的组成如下:
共享变量
- 入口等待队列
- 一个锁:控制整个管程代码的互斥访问
- 0个或多个条件变量:每个条件变量都包含一个自己的等待队列,以及相应的出/入队操作
注意:在入口等待队列中的线程,都是条件满足情况未知或曾经满足过条件的线程,它们等待管程的新一轮执行,而条件变量的等待队列中的线程必须等到满足该条件后才可以重新回到入口等待队列中去
管程模型相较于信号量模型的好处就是:易用,它可以把多个同步条件的操作都集中在一个模块里,从而简化同步机制的实现难度
管程的模型可以分为三类:
- Hansen模型:要求唤醒线程操作放在代码最后,这样可以保证当前线程在唤醒其他线程时已完成自己的所有操作
- Hoare模型:线程可以在代码任意位置执行唤醒操作,而且当唤醒其他线程后,自己立即阻塞,当被唤醒的线程完成操作后,再恢复自己
- MESA模型:同Hoare一样,可以再代码任意位置执行唤醒操作,但被唤醒的线程不会立即执行,而是加入入口队列等待执行,因此在实现中需要将条件检查放入循环中,因为无法保证线程从唤醒到开始执行期间条件还是否保持满足
总结
本文介绍了 synchronized 工作原理和锁升级的过程。其中锁队列的协作流程较复杂,本文配了详细的流程图可以参照。最后附上了一部分重要代码的解析,理解 synchronized 原理之后便于写出性能更高的代码。
简单的来说偏向锁通过对比 Mark Word thread id 解决加锁问题。而轻量级锁是通过用 CAS 操作 Mark Word 和自旋来解决加锁问题,避免线程阻塞和唤醒而影响性能。重量级锁是将除了拥有锁的线程以外的线程都阻塞。
参考资料

若有收获,就点个赞吧
0 人点赞
