2.1.1末端执行器概述
工业机器人末端执行器即工业机器人的手部,它安装在机器人的腕部上,用于直接抓握工件或执行焊接、喷涂等作业,对整个机器人任务完成的质量起着关键的作用,是工业机器人最为重要的执行机构。夹持式")
吸附式")
专用工具(柔性焊枪)")
2.1.2夹持式末端执行器
夹持式末端执行器应用较为广泛,其主要由手指、驱动装置、传动机构和支架等组成,通过手指的开闭动作实现对物体的夹持,其结构如图3-2所示。夹持式末端执行器根据手指开合的动作特点,又可分为回转型和平移型两种。
1.回转型末端执行器
1)单作用斜契模式
单作用斜契模式回转型末端执行器如图3-3所示。斜樱向下运动,克服弹簧拉力,使杠杆手指装着滚子的一端向外撑开,从而夹紧工件:斜模向上运动,则在弹簧拉力作用下使手指松开工件。一般手指与斜模通过滚子接触,可以减小摩擦力,提高机械效率。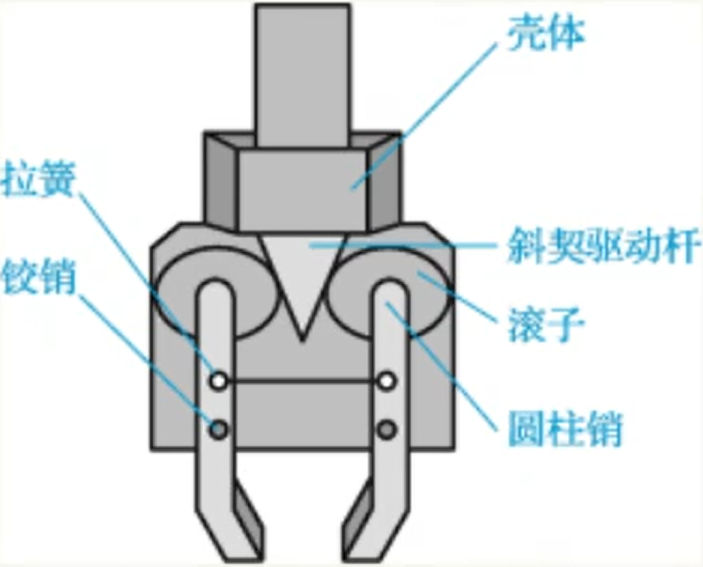
2)双支点连杆式
双支点连杆式回转型末端执行器如图3-4所示。当驱动杆做直线往复运动时,带动连杆推动两手指各绕支点做回转运动,控制手指松开或闭合。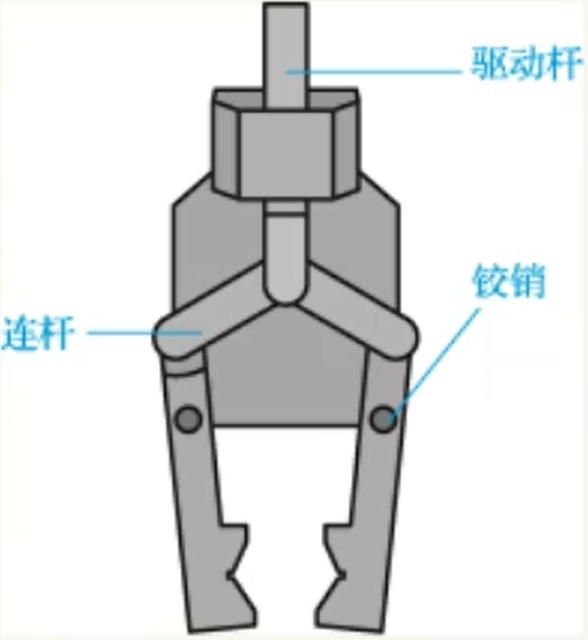
3)滑槽杠杆式
滑槽杠杆式回转型末端执行器如图3-5所示。驱动杆上的圆柱销嵌套在滑槽内,当驱动杆同圆柱销一起做往复运动时,即可拨动两个手指各绕其支点(铰销)做相对回转运动,从而控制手指的松开或闭合。
2.平移型末端执行器
1)直线往复移动机构
实现直线往复的移动机构很多,如斜模平移机构、杠杆平移结构、螺旋平移机构等如图3-6所示。直线往复移动机构既可以是双指型的,也可以是三指型的,还可以是多指型的;可以是自动定心,也可以是非自动定心。
2)平面平行移动机构
如图3-7所示为常用的齿条齿轮平移机构。平面平行移动机构一般采用平行四边形的铰链机构(即双曲柄铰链四连杆机构),以实现手指平移。平面平行移动机构的传动方法除齿条齿轮传动外,常用的方法还有蜗轮蜗杆传动和连杆斜滑槽传动等。
3.末端执行器的手指
手指是工业机器人直接与工件接触的部件,它的结构形式一般取决于工件的形状和特性。常用的手指有V形指、平面指、尖指和特形指等,如图3-8所示。
3.1.3吸附式末端执行器
根据吸附原理的不同,吸附式末端执行器可分为气吸式和磁吸式两种。
1.气吸式末端执行器
气吸式末端执行器是利用吸盘内的压力与大气压之间的压力差而工作的,其按形成压力差方法的不同,可分为真空气吸、喷气式负压气吸和挤压排气负压气吸三种类型,如图3-10所示。
2.磁吸式末端执行器
磁吸式末端执行器主要由电磁式吸盘、防尘盖、线圈、壳体等组成。由于磁吸式末端执行器是利用电磁铁通电后产生的电磁吸力取料,因此只能对铁磁物体起作用。
磁吸式末端执行器吸附工件的原理:
如图3-12(a)所示,当线圈通电后,在铁芯内外产生磁场,磁力线经过铁芯,空气隙和衔铁被磁化并形成回路。衔铁受到电磁吸力的作用被牢牢吸住。实际使用时,一般采用如图3-12(b)所示的盘式电磁铁,其衔铁是固定的,衔铁内用隔磁材料将磁力线切断。当衔铁接触铁磁物零件时,零件即被磁化而形成磁力线回路,并受到电磁吸力而被吸住。
3.1.4专用工具
工业机器人是一种通用性很强的自动化设备,可根据作业要求装配各种专用的末端执行器来执行各种动作。
这些专用工具可通过电磁吸盘式换接器快速地进行更换,形成一整套系列满足用户的不同加工需求,如图3-13所示。

若有收获,就点个赞吧
0 人点赞
