目的
使用哪吒A36合1Arduino套装制作皮筋发射器。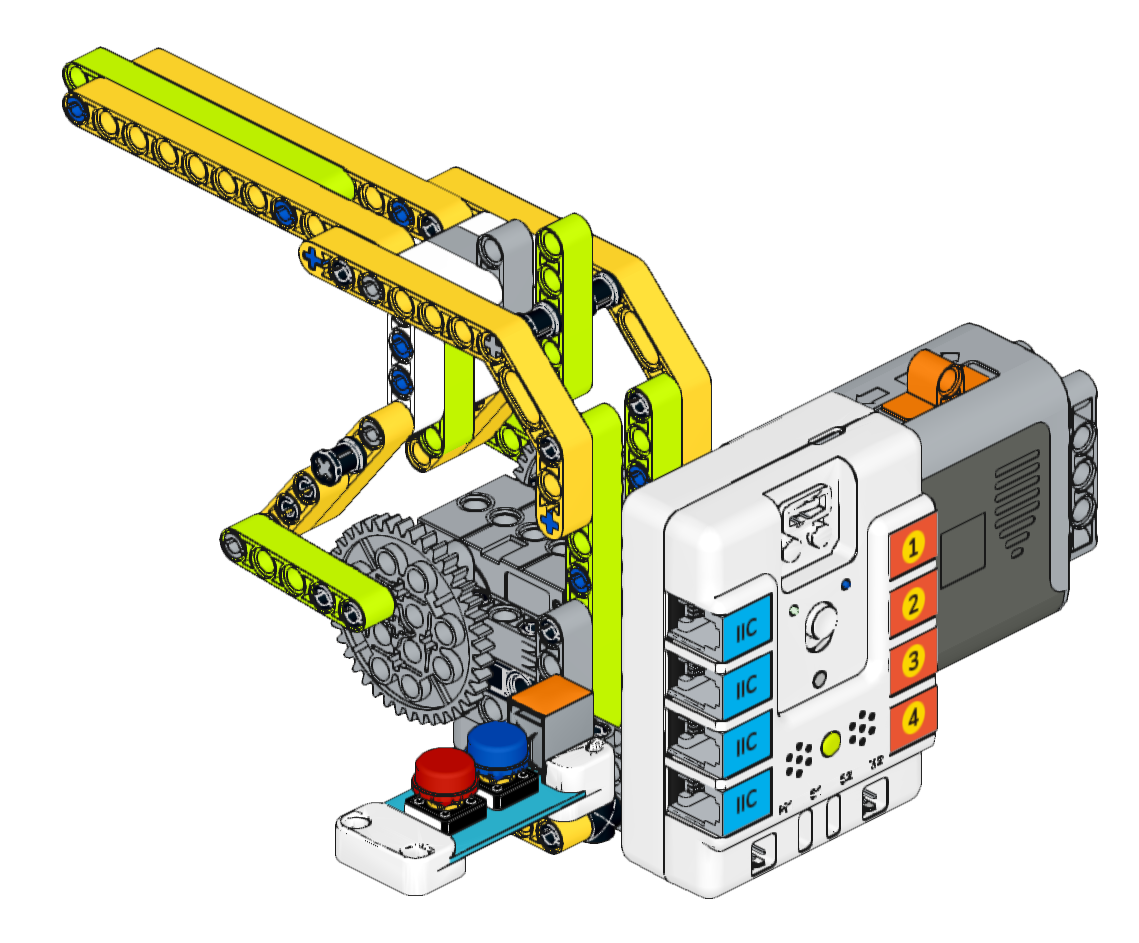
购买链接
所需材料
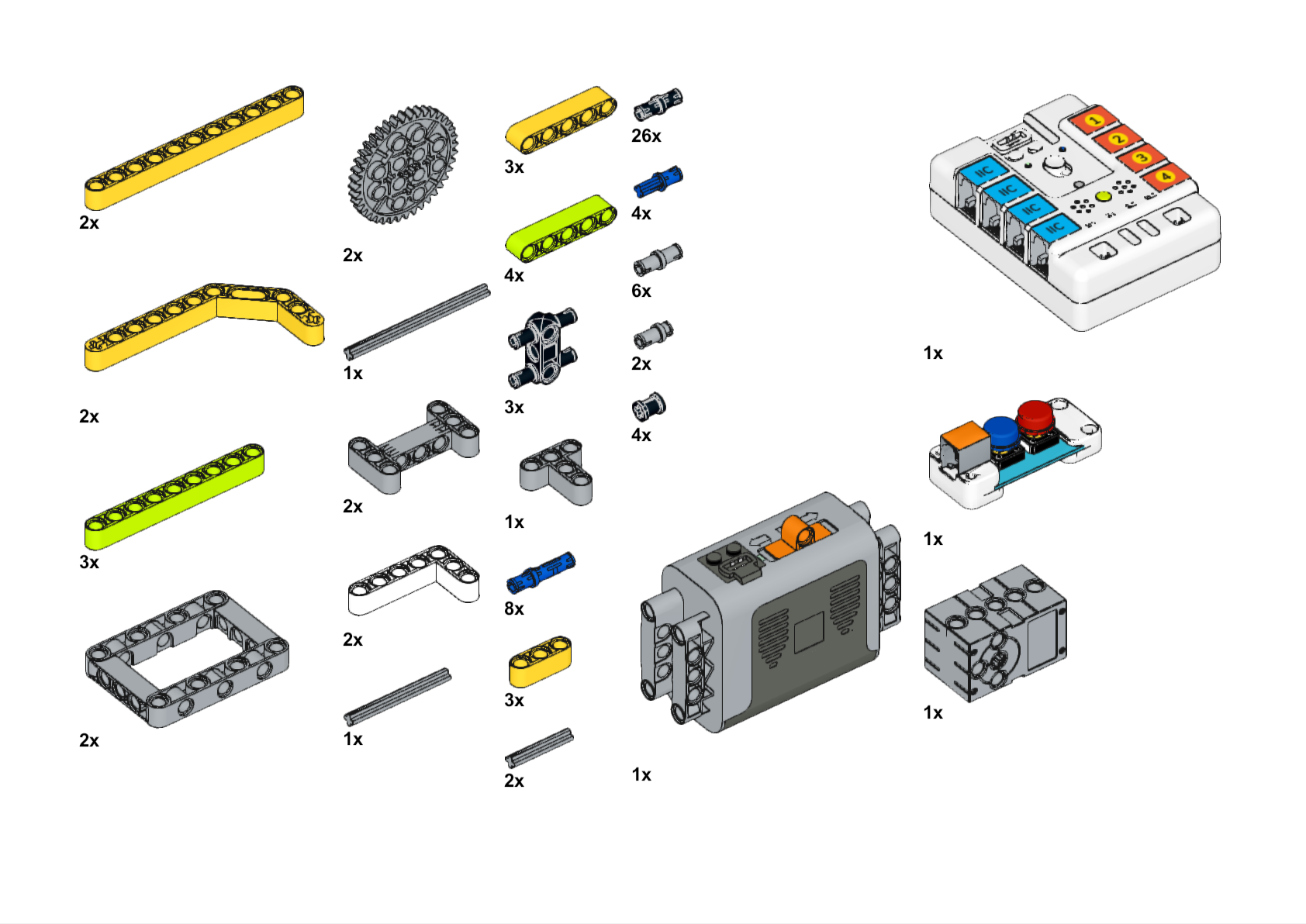
搭建图下载:
case-01-皮筋发射器.pdf

硬件连接图
将两颗按钮连接到哪吒A主控盒的J1端口,将舵机连接到哪吒A主控盒的S1端口。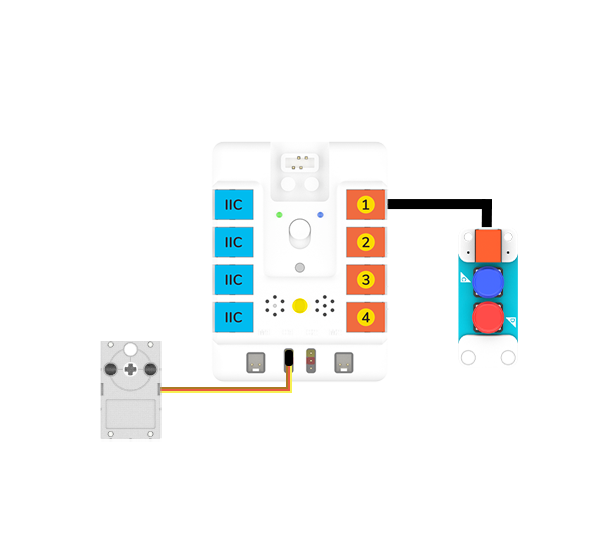
编写程序
准备编程环境
编程环境准备步骤:请参考:编程环境准备及示例
下载并导入主控盒的库文件和依赖库文件后,还需要导入两颗按钮模块的库文件:PlanetXButton-main.zip
和主控盒的接口定义文件:RJPins-main.zip
示例程序:
#include <PlanetXButton.h>#include <NezhaA.h>#include <RJPins.h>PlanetXButton buttonJ1(J1); //创建一个PlanetXButton类的实例NezhaA nezhaA; //创建一个NezhaA类的实例void setup() {nezhaA.begin(); //初始化蜂鸣器、电机、舵机、灯光}void loop() {if (buttonJ1.isPressed(C)) { //当检测到按键C被按下时nezhaA.setServoAngle(S1, 190); //设置S1端口的舵机角度为200度}if (buttonJ1.isPressed(D)) {nezhaA.setServoAngle(S1, 270);}}
结果
通过按键控制皮筋发射器发射橡皮筋。
注意:控制发射的舵机角度需要根据具体使用的橡皮筋数量进行调整,使用过多的橡皮筋会导致拉力过大,损坏用于控制发射的舵机,建议用于发射的橡皮筋不超过三个。

若有收获,就点个赞吧
0 人点赞
